物品分类案例
1 硬件安装
先将末端法兰手动对齐刻度线

然后将相机按照图片的姿态安装到末端法兰上,再将相机线查到底部的主控的USB接口上

再将吸泵安装到相机的乐高件插孔上
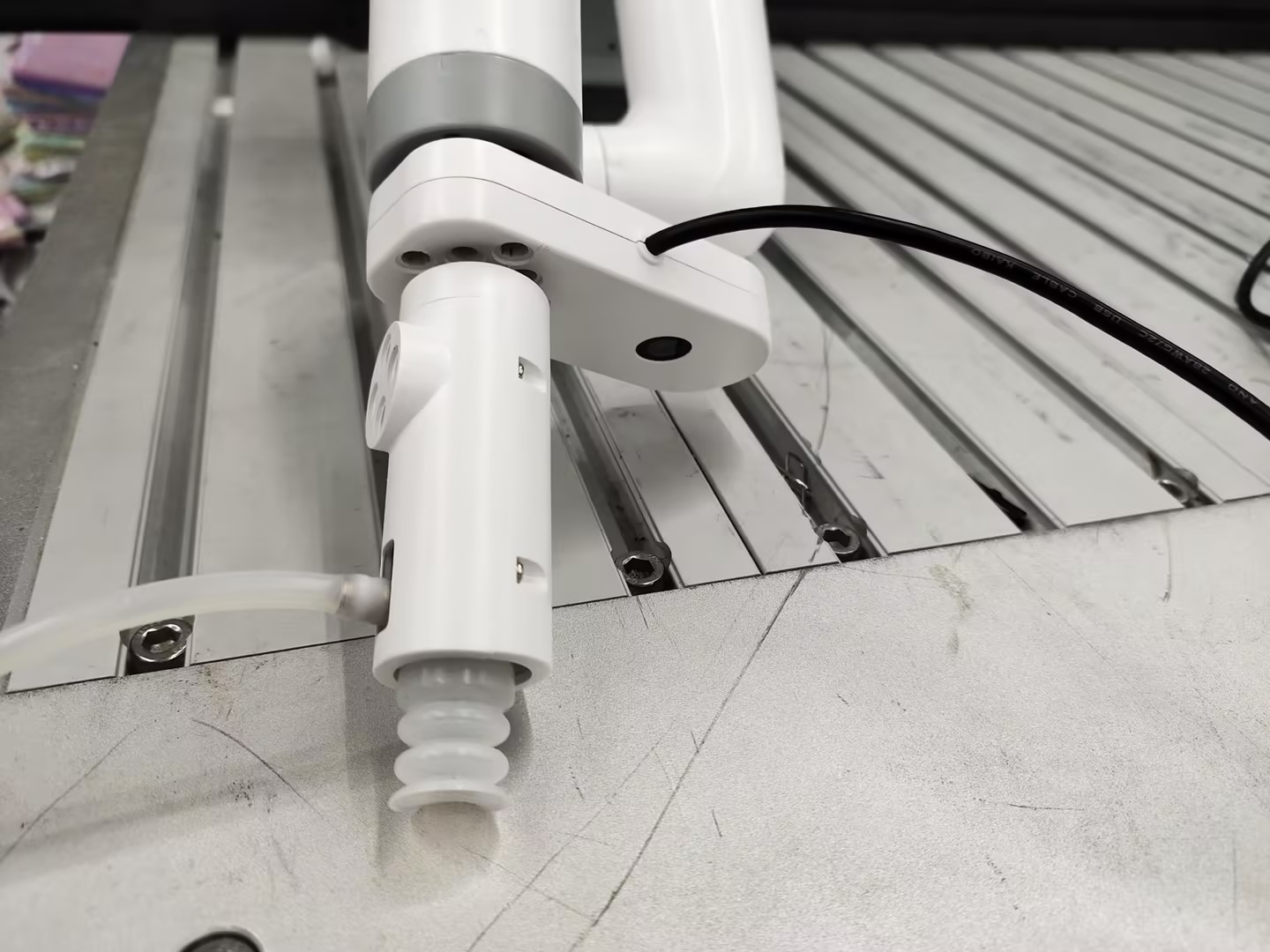
最后将吸泵盒控制4pin线接到机械臂底部主控IO上
左侧为吸泵引脚,右侧为机械臂引脚
GND -> GND
5V -> 5V
G2 -> 37
2 软件运行
打开一个终端输入命令,按下键盘回车键运行
export CAM_TYPE=usb
然后再输入下面命令,启动相机识别节点
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_config_file:=config/yolov8workconfig.json dnn_example_image_width:=640 dnn_example_image_height:=480
输出log显示,节点运行成功
[example-3] [WARN] [1655095347.608475236] [example]: Create ai msg publisher with topic_name: hobot_dnn_detection
[example-3] [WARN] [1655095347.608640353] [example]: Create img hbmem_subscription with topic_name: /hbmem_img
[example-3] [WARN] [1655095348.709411619] [img_sub]: Sub img fps 12.95
[example-3] [WARN] [1655095348.887570945] [example]: Smart fps 12.10
[example-3] [WARN] [1655095349.772225728] [img_sub]: Sub img fps 11.30
[example-3] [WARN] [1655095349.948913662] [example]: Smart fps 11.31
[example-3] [WARN] [1655095350.834951431] [img_sub]: Sub img fps 11.30
[example-3] [WARN] [1655095351.011915729] [example]: Smart fps 11.30
在PC端的浏览器输入http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址):

案例程序
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from ai_msgs.msg import PerceptionTargets
from sensor_msgs.msg import CompressedImage
from pymycobot import MyCobot280RDKX5,utils
import time
import cv2
import numpy as np
import Hobot.GPIO as GPIO
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD)
output_pin1 = 37
GPIO.setup(output_pin1, GPIO.OUT)
GPIO.output(output_pin1, GPIO.HIGH)
def pump_off():
GPIO.output(output_pin1, GPIO.HIGH)
time.sleep(0.05)
#GPIO.output(output_pin2, GPIO.LOW)
#time.sleep(0.05)
def pump_on():
GPIO.output(output_pin1, GPIO.LOW)
time.sleep(0.05)
# GPIO.output(output_pin2, GPIO.HIGH)
# time.sleep(0.05)
class MinimalSubscriber(Node):
def __init__(self):
self.mc=MyCobot280RDKX5("/dev/ttyS1",1000000)
self.mc.sync_send_angles([0,0,-90,0,0,136.21],50)
print("ok")
super().__init__('minimal_subscriber')
self.subscription = self.create_subscription(
PerceptionTargets,
'/hobot_dnn_detection',
self.listener_callback,
10)
self.target=["car","banana","cat","clock","pizza","remote"]
self.cameraMatrix =np.array([
[827.29511682, 0., 368.87666292],
[0., 824.88958537, 262.03016541],
[0., 0., 1.]])
self.distCoeffs = np.array(([[0.21780081, -0.56324781, 0.01165061, 0.01845253,
-1.0631406]]))
self.cam_coords=[170.4, -59.2, 197.4, -178.16, -2.54, 134.06]
self.a=[-35.33, -43.24, -28.56, -21.0, 0.79, 139.83]
self.b=[-74.7, -16.43, -71.36, -5.88, 0.7, 143.87]
self.c=[63.89, -39.9, -36.82, -15.99, 0.7, 136.93]
self.d=[113.46, -5.27, -85.95, -1.58, 0.79, 138.86]
def calculate_center(self,roi):
x_center = roi.x_offset + roi.width / 2
y_center = roi.y_offset + roi.height / 2
return [x_center, y_center]
def pixel_to_camera(self,u, v):
fx = self.cameraMatrix[0, 0]
fy = self.cameraMatrix[1, 1]
cx = self.cameraMatrix[0, 2]
cy = self.cameraMatrix[1, 2]
Z=0.241
X = (u - cx) * Z / fx
Y = (v - cy) * Z / fy
X=float(round(X*1000,2))
Y=float(round(Y*1000,2))
return [X, Y]
def listener_callback(self, msg):
for target in msg.targets:
for rois in target.rois:
result=self.calculate_center(rois.rect)
if rois.type in self.target:
xy=self.pixel_to_camera(result[0],result[1])
self.cam_coords[0]=self.cam_coords[0]+35
self.cam_coords[0]=self.cam_coords[0]-xy[0]
self.cam_coords[1]=self.cam_coords[1]+xy[1]
self.cam_coords[2]=150
# print("cam_coords=",self.cam_coords)
self.mc.send_coords(self.cam_coords,50)
time.sleep(3)
self.cam_coords[2]=78
self.mc.send_coords(self.cam_coords,50)
time.sleep(3)
pump_on()
time.sleep(1)
self.cam_coords[2]=160
self.mc.send_coords(self.cam_coords,50)
time.sleep(3)
["car","banana","cat","clock"]
if rois.type=="car":
self.mc.sync_send_angles(self.a,50)
elif rois.type=="banana" or rois.type=="pizza":
self.mc.sync_send_angles(self.b,50)
elif rois.type=="cat" :
self.mc.sync_send_angles(self.c,50)
elif rois.type=="clock" or rois.type=="remote":
self.mc.sync_send_angles(self.d,50)
pump_off()
# time.sleep(1)
time.sleep(2)
self.cam_coords=None
self.mc.sync_send_angles([0,0,-90,0,0,136.21],100)
# self.cam_coords=[170.4, -59.2, 197.4, -178.16, -2.54, 134.06]
while self.cam_coords is None:
self.cam_coords=self.mc.get_coords()
def main(args=None):
rclpy.init(args=args)
minimal_subscriber = MinimalSubscriber()
rclpy.spin(minimal_subscriber)
minimal_subscriber.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
效果展示
