硬件问题
Q: 280PI怎么装到包装里?
A:参考下图,手动摆成一个W型放入即可

Q:树莓派系统如何输入音频?
A:树莓派不能用3.5接口做音频输入,3.5mm的耳机插孔是不支持输入音频的,插入耳机和麦克风都检测不到,若想使用输入、输出音频的方式需要使用USB接口的麦克风或者耳机
Q: 关节抖动、关节角度偏差过大或关节无力下坠如何优化?
参考机器人参数介绍章节,检查实际负载是否在机械臂有效负载范围内,负载过大会导致关节抖动,可适当减轻实际关节的负载
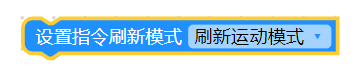
将运动模式更改成刷新模式,这样会机械臂的运行轨迹会相对平滑,具体的API,请参考 set_fresh_mode(1)
查看以下链接内容调整pid:https://drive.google.com/file/d/1UWhaaSTuwLFImuEGY1J2tvgxTQDwWxK_/view?usp=sharing
- 查看gitbook章节,使用mystudio下载对应版本的Atom固件,建议下载最新的
- 查看gitbook第5章节,对机械臂进行零位校准,也可参考下面链接的校准步骤:https://drive.google.com/file/d/1XtKH-ykKWPH0q9Z_YHwzkgwNKRhstHhi/view?usp=sharing
- 使用时间较长的机器(3个月以上)可能会出现关节老化产生关节间隙的情况,可按照以下视频,手动掰动关节,查看是否存在关节虚位:https://drive.google.com/file/d/1tXDUALmfw1z0u6lM9uH5hOHivjbRoWxW/view?usp=sharing
- 如果存在关节老化虚位问题,这种抖动则属于机器自然老化无法避免。
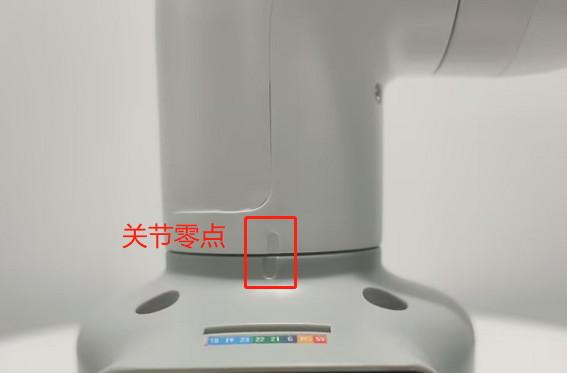
Q: 什么是关节零位点?
以下图为例,关节与关节外壳边缘之前会设计有一个拱形槽,这个就是关节零位点
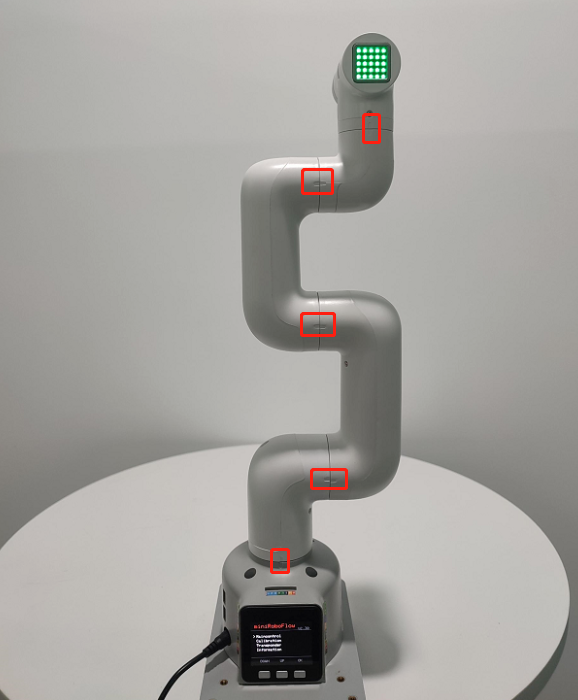
一般校准后零点姿态如下:
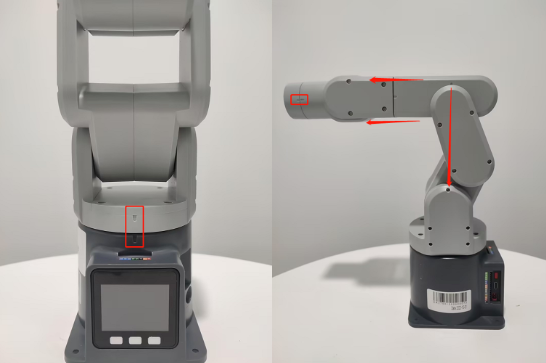
特别注意270的关节零位姿态如下:
Q:有没有零位校准的方法?
请参考gitbook第5章节或者下面这个链接:
https://drive.google.com/file/d/1XtKH-ykKWPH0q9Z_YHwzkgwNKRhstHhi/view?usp=sharing
Q:mycobot260/270/280系列PI/JN机器的GPIO如何使用?
A:以280JN为例,请参考下图源码,其他机型注意更改设备串口信息。
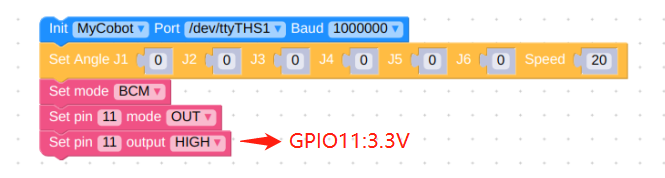
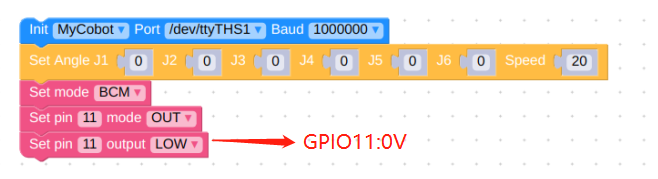
且注意切勿使用被占用的引脚,如280JN被占用的引脚有GPIO0,1,3等,具体请参考对应机械臂gitbook资料的GPIO说明
注意:转动机械臂时应小角度、轻轻地转动,到达限位后就不可用力继续转动。
Q:atom在机械臂中的作用是什么?
- A:atom在机械臂中主要进行机械臂的运动学算法控制:包括了正逆运动学,选解,加减速,速度同步,多次方插补,坐标转换等,需要的实时控制与多线程等。atom的相关程序暂不开源。
Q:不同版本的机械臂支持什么通信接口?
- A:基于微处理器的机械臂支持socket通信TCP;基于微控制器的机械臂可以USB转串口通信。