气动夹爪
兼容型号: myCobot 320、myCobot Pro 630、myCobot Pro 600
产品图片

规格
| 名称 | mycobot 气动夹爪 |
|---|---|
| 模型 | myCobotPro_Gripper_Air_10 |
| 材料 | 金属 + 7500 尼龙 |
| 夹取范围 | 0-8mm |
| 夹紧力 | 外径 34N 内径 45N |
| 驱动模式 | 气动 |
| 传输方式 | 活塞缸 |
| 尺寸 | 67.3×38×23.6mm |
| 重量 | 180g |
| 固定方法 | 螺丝固定 |
| 使用环境要求 | 常温常压 |
| 控制接口 | 输入/输出控制 |
| 适用设备 | myCobot 320 系列、 myCobot Pro 630、 myCobot Pro 600 |
用于抓取物体
引言
气动夹爪又称气动手指或气动夹钳,是一种利用压缩空气作为动力抓取或抓取工件的执行器。它体积小、重量轻、外形紧凑,能够实现单向和双向抓取、自动对中、高重复精度和自动控制磁性开关。
气动夹爪套件包括夹爪法兰、气泵、φ8 气管、φ6 气管、φ8-6 快速接头、电磁阀和电缆。其主要功能是代替人力抓取工作,可有效提高生产效率和工作安全性。需要外接吸气泵。
工作原理
单活塞:轴驱动曲柄,气爪由活塞驱动开合。两个爪片上分别布置有相应的曲柄槽。为减小摩擦阻力,爪片与机身之间采用钢珠滑轨结构连接。
双活塞:由两个活塞控制,每个活塞通过一个滚轮和一个双曲柄与一个气动指连接,形成一个特殊的驱动单元。需要注意的是,气动指始终向中心轴向移动,每个气动指不能独立移动。
平行钳形气缸:如果气动指朝相反方向移动,则先前被压缩的活塞处于排气状态,而另一个活塞处于压缩状态。
适用对象
体积小于夹紧行程
重量小于最大夹紧重量
自定义指尖可扩展更多用法
安装使用
需要配合空压机使用:
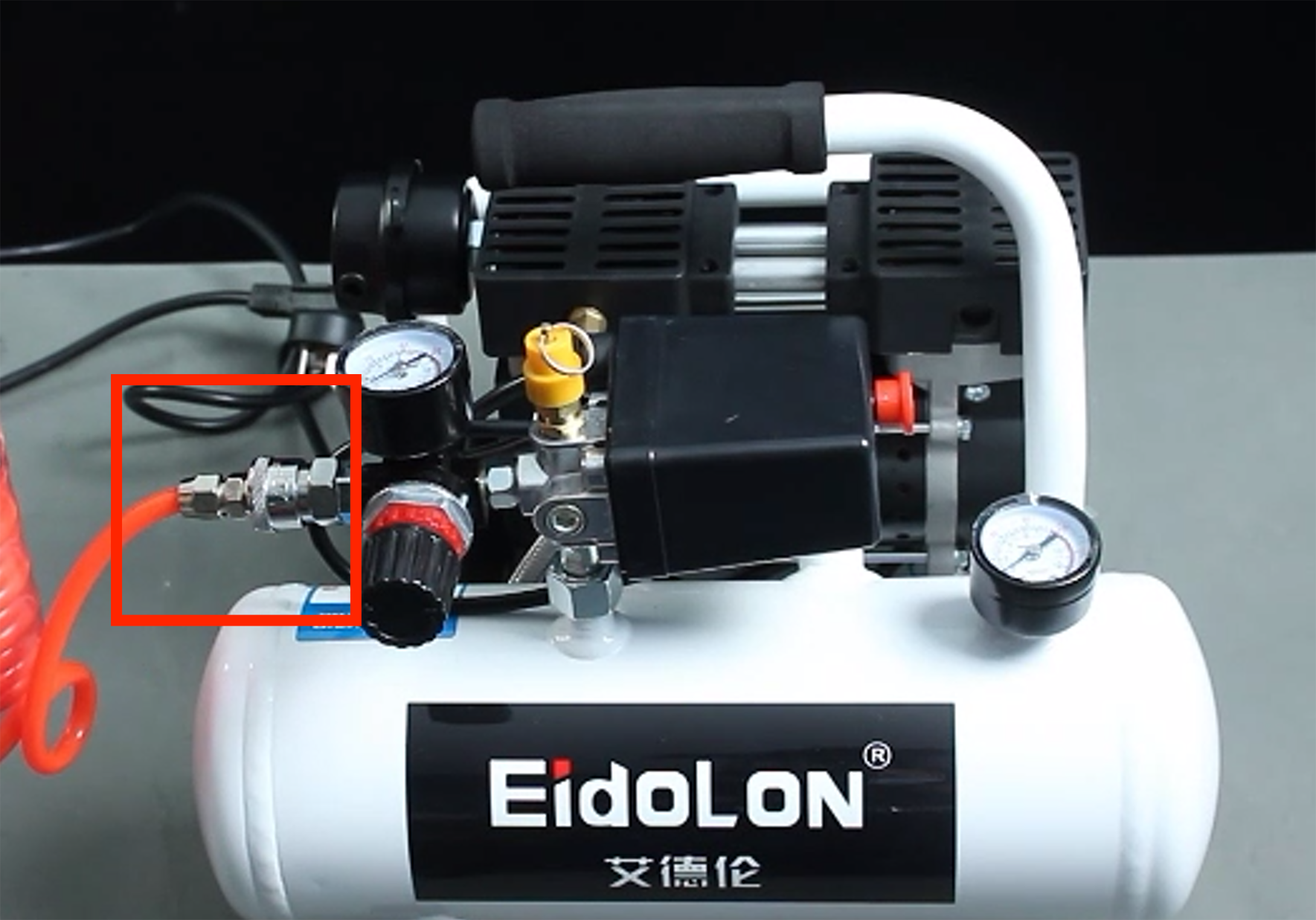
将黑色插头插入排插;
将搭配的红色软管插入机器上的接口:
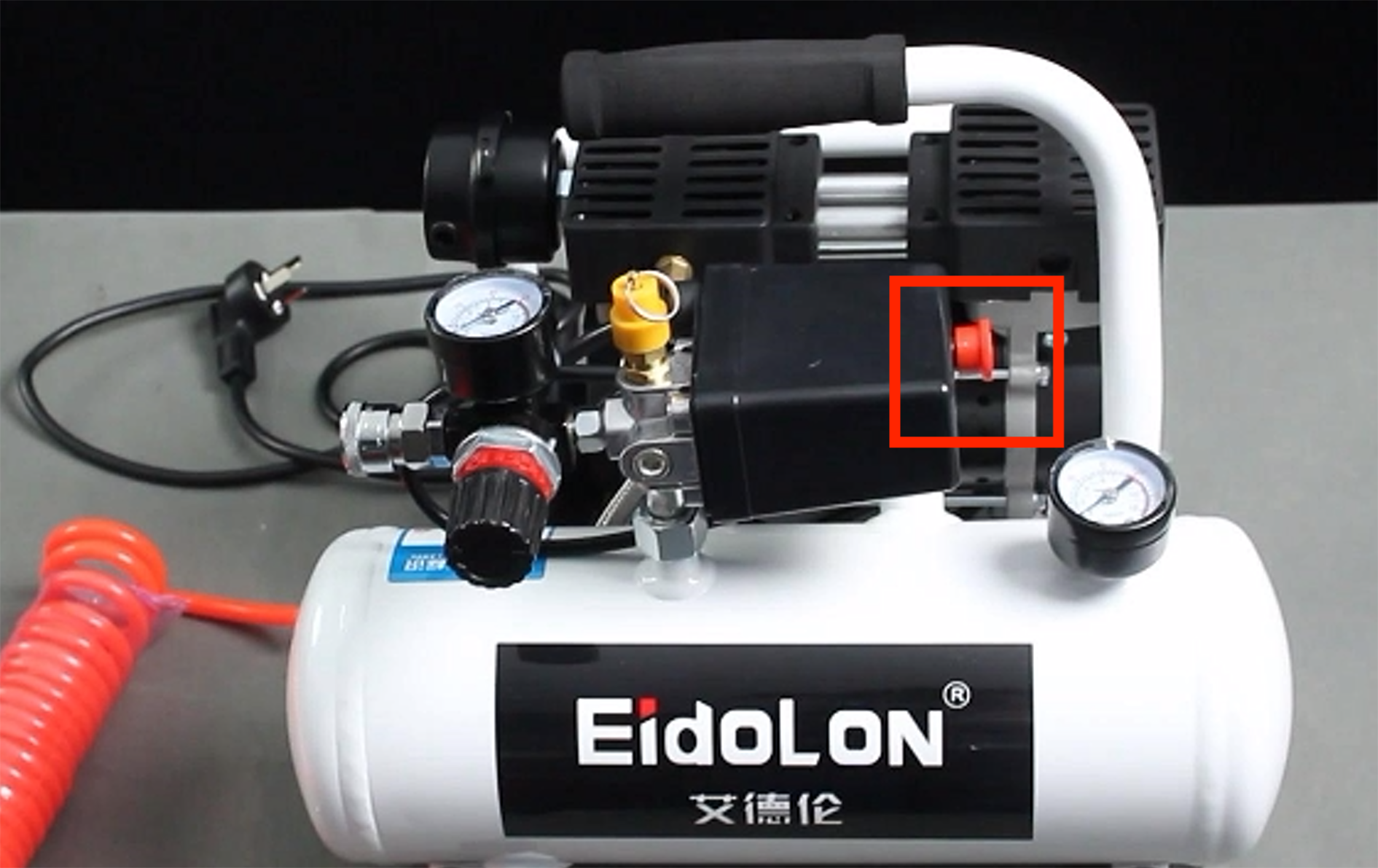
- 红色按钮为开关,往外拔即打开,按回去则关闭机器:
夹爪安装:
- 将空压机红色软管的另一端接上电磁阀的接口:
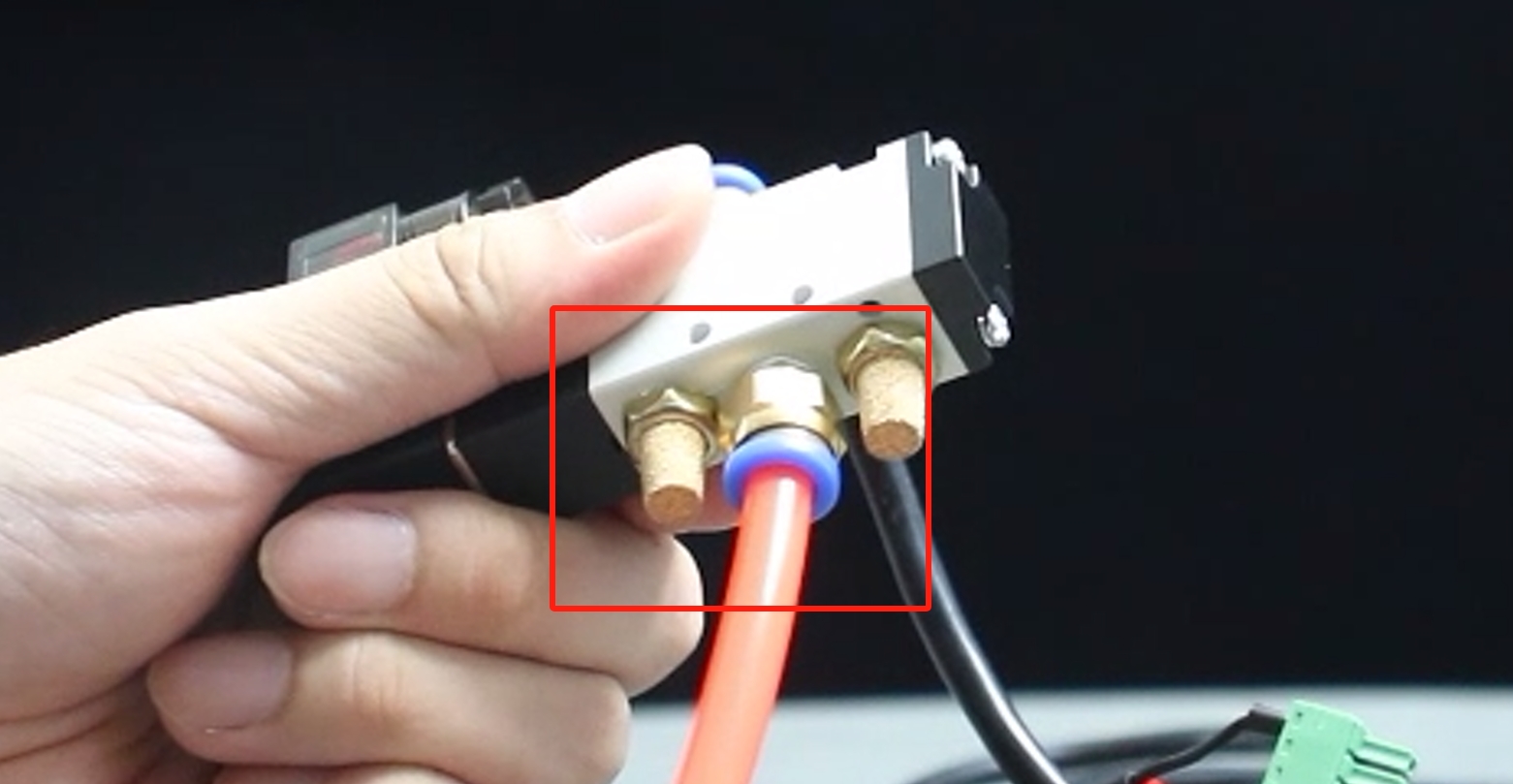
- 将电磁阀另一端再拧开一个接口供启动夹爪控制开合使用:

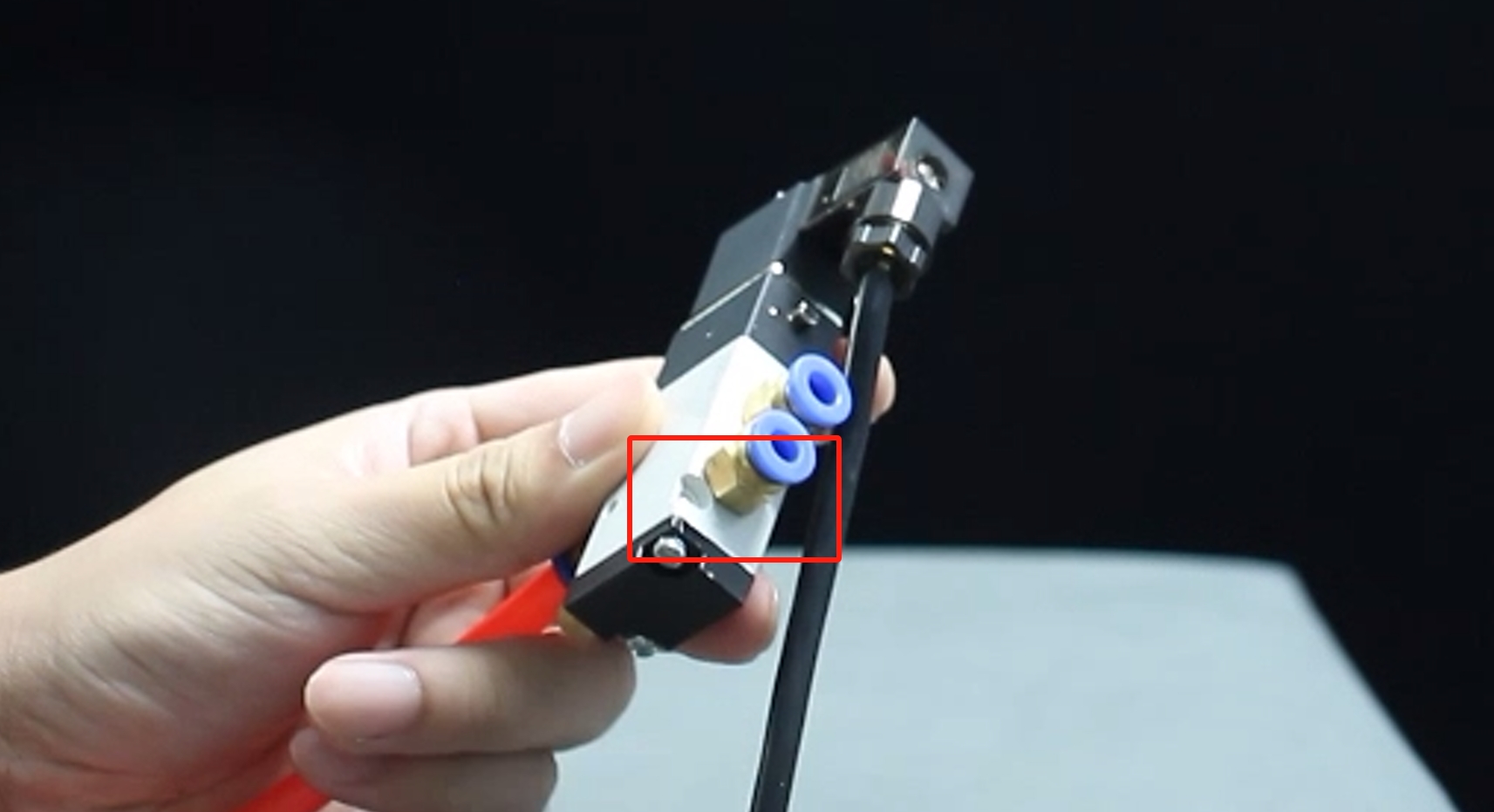
- 用配套的两根透明软管,一端接在电磁阀的两个接口:
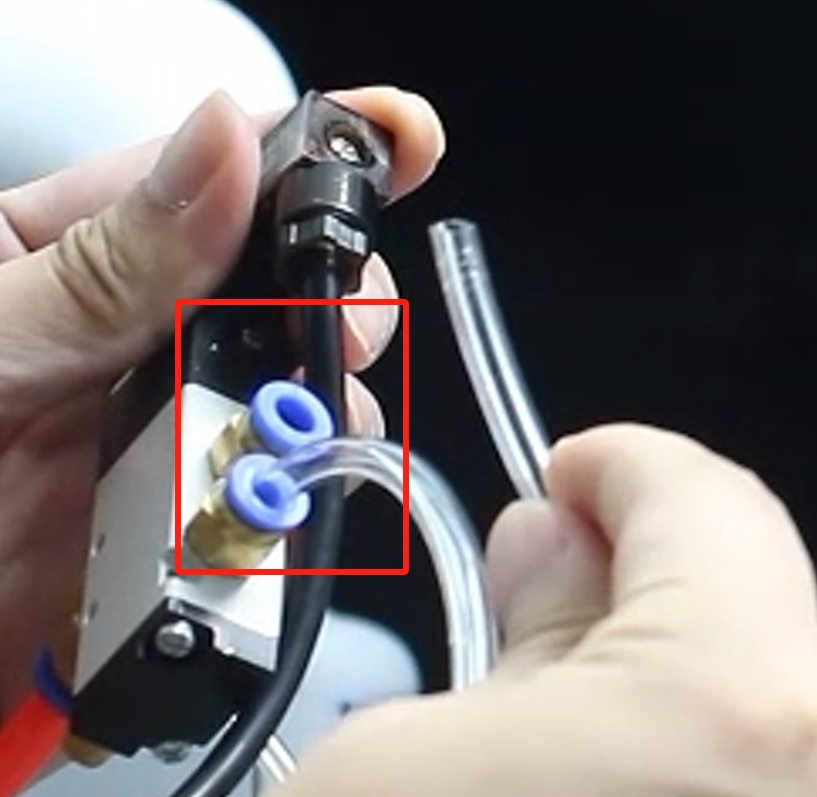
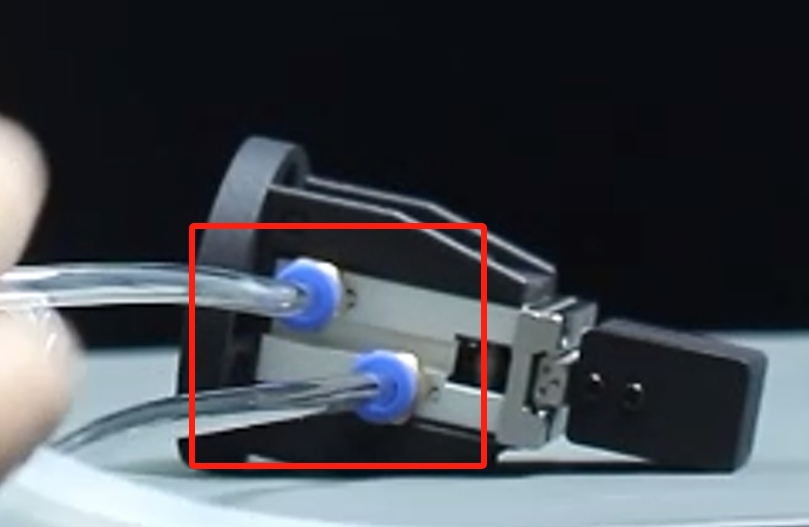
- 透明软管另一端接在夹爪的两个接口上:
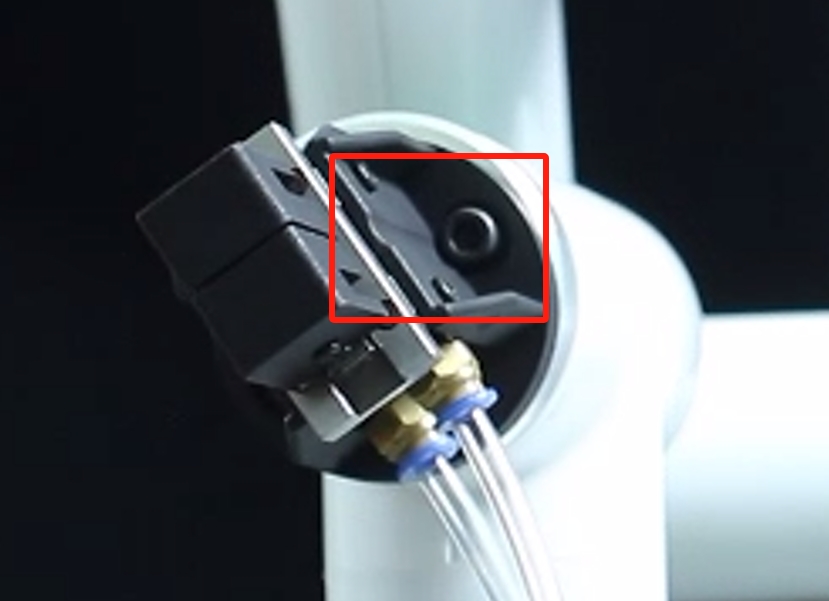
- 用配套螺丝将夹爪固定在机械臂末端:
电气连接:
- 连接线黑色接机械臂底座 GND,红色接 OUT1~OUT6 任意一个,根据选择的接口更改后续程序的引脚号,这里使用 OUT1:
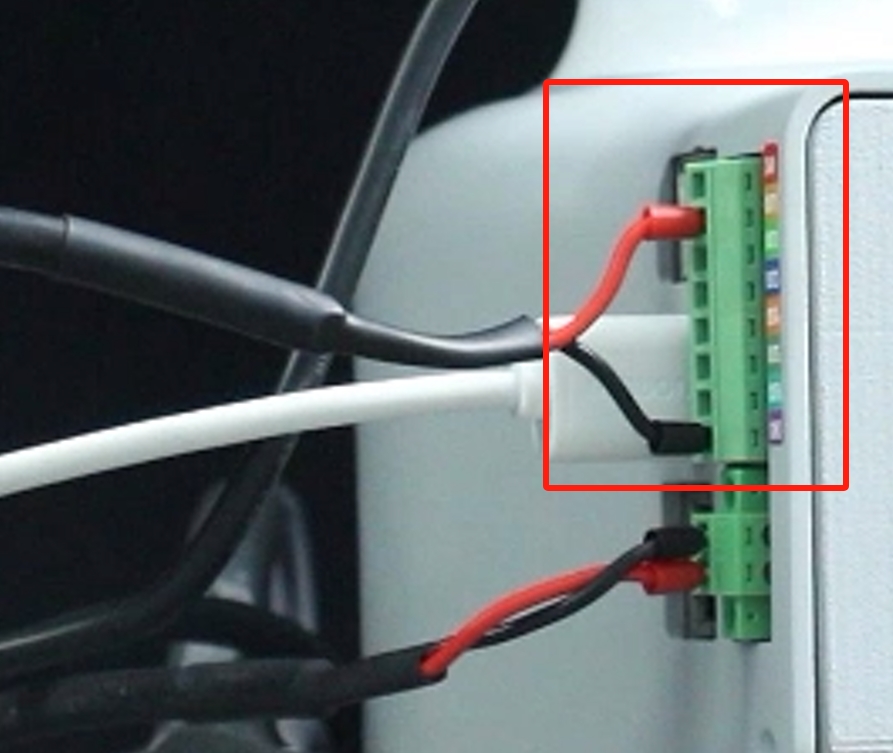
- 连接线黑色接机械臂底座 GND,红色接 OUT1~OUT6 任意一个,根据选择的接口更改后续程序的引脚号,这里使用 OUT1:
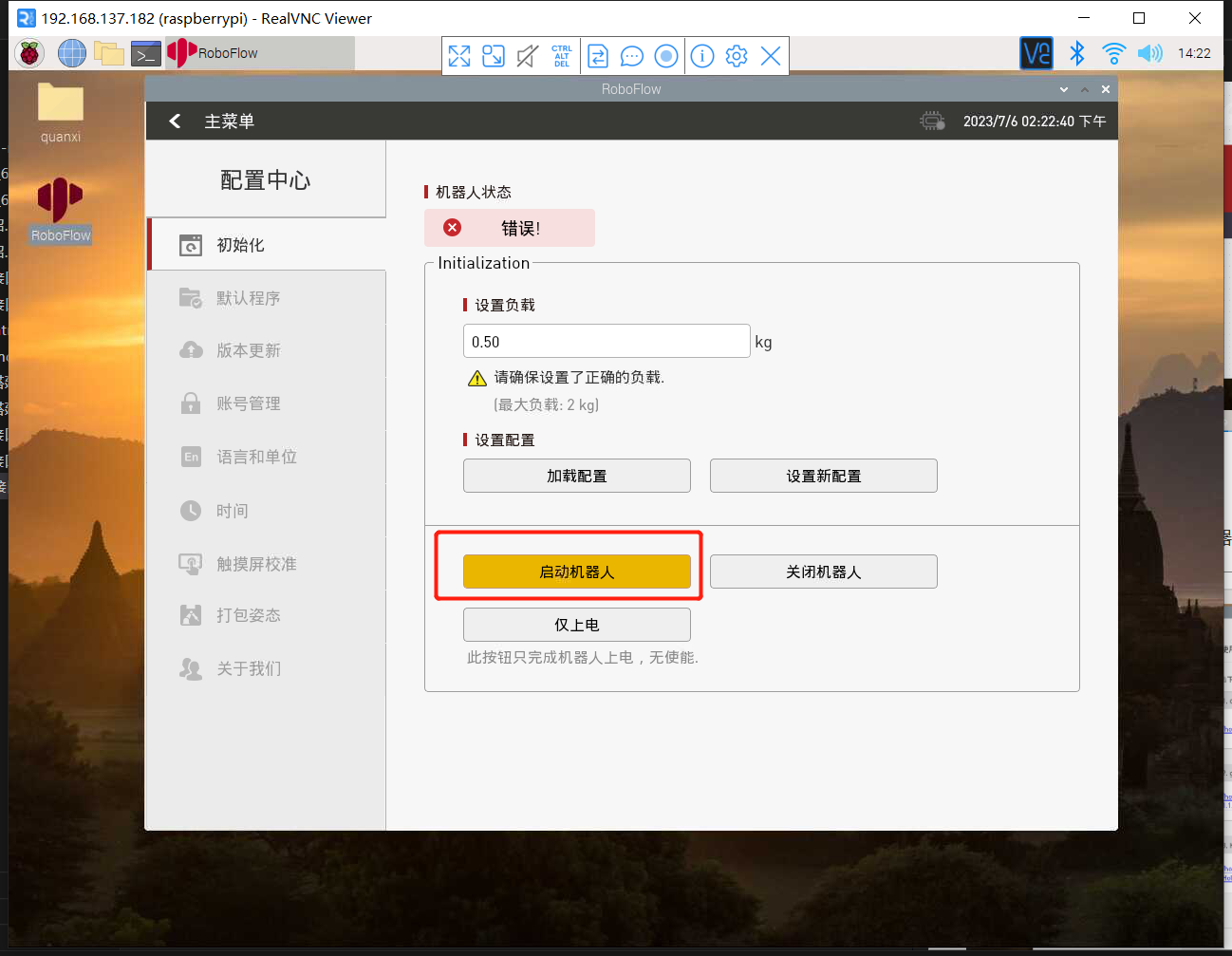
3 通过 python 控制
使用前需要先启动机器人系统

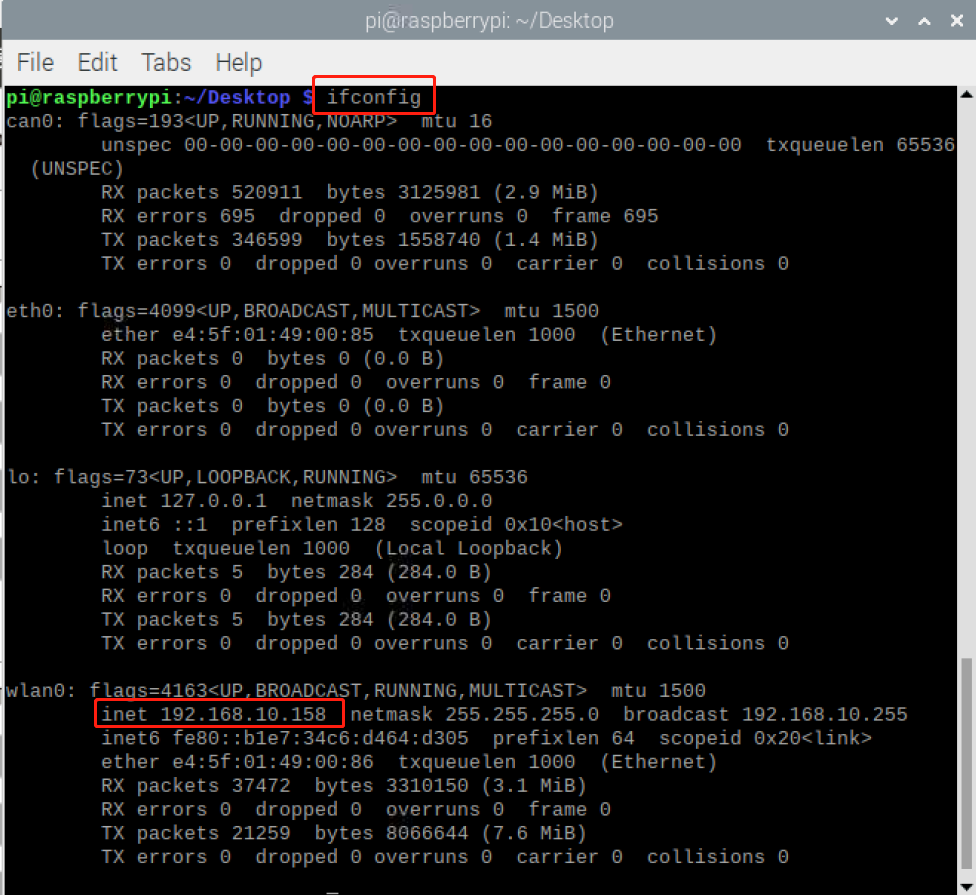
确认机械臂的IP地址:终端输入 ifconfig 获取
from pymycobot import ElephantRobot
import time
# 将ip更改成P600树莓派的实时ip
elephant_client = ElephantRobot("192.168.10.158", 5001)
# 启动机器人必要指令
elephant_client.start_client()
time.sleep(1)
elephant_client.set_digital_out(0,1)
time.sleep(2)
elephant_client.set_digital_out(0,0)
time.sleep(2)