DH坐标系:
MDH参数表:
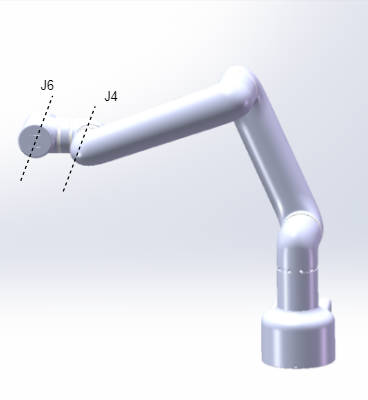
腕关节奇异:
腕关节奇异是机械臂常见的奇异位置,当J6旋转轴与J4旋转轴平行时会触发该奇异,此时坐标仅能垂直上下移动
肩关节奇异:
当J6坐标系原点(J5与J6旋转轴交点)正好运动到J1旋转轴正上方时触发肩奇异
肘关节奇异:
当J2连杆与J3连杆平行时触发肘奇异,此时坐标仅能执行“收臂”动作