mycobot630 与 PLC IO交互控制案例
1 功能效果说明
机械臂收到PLC的IO信号后,会执行一个各个关节回到零位的动作
2 原理说明
机械臂的输出端首先会先输出一个信号,PLC采集到有输入信号后,PLC输出端会输出一个信号,使得24v继电器线圈得电,接通常开触点,将低电平信号传递给机械臂的输入端,机械臂采集到有输入信号后,就会执行一个各个关节回到零位的动作
3 硬件链接
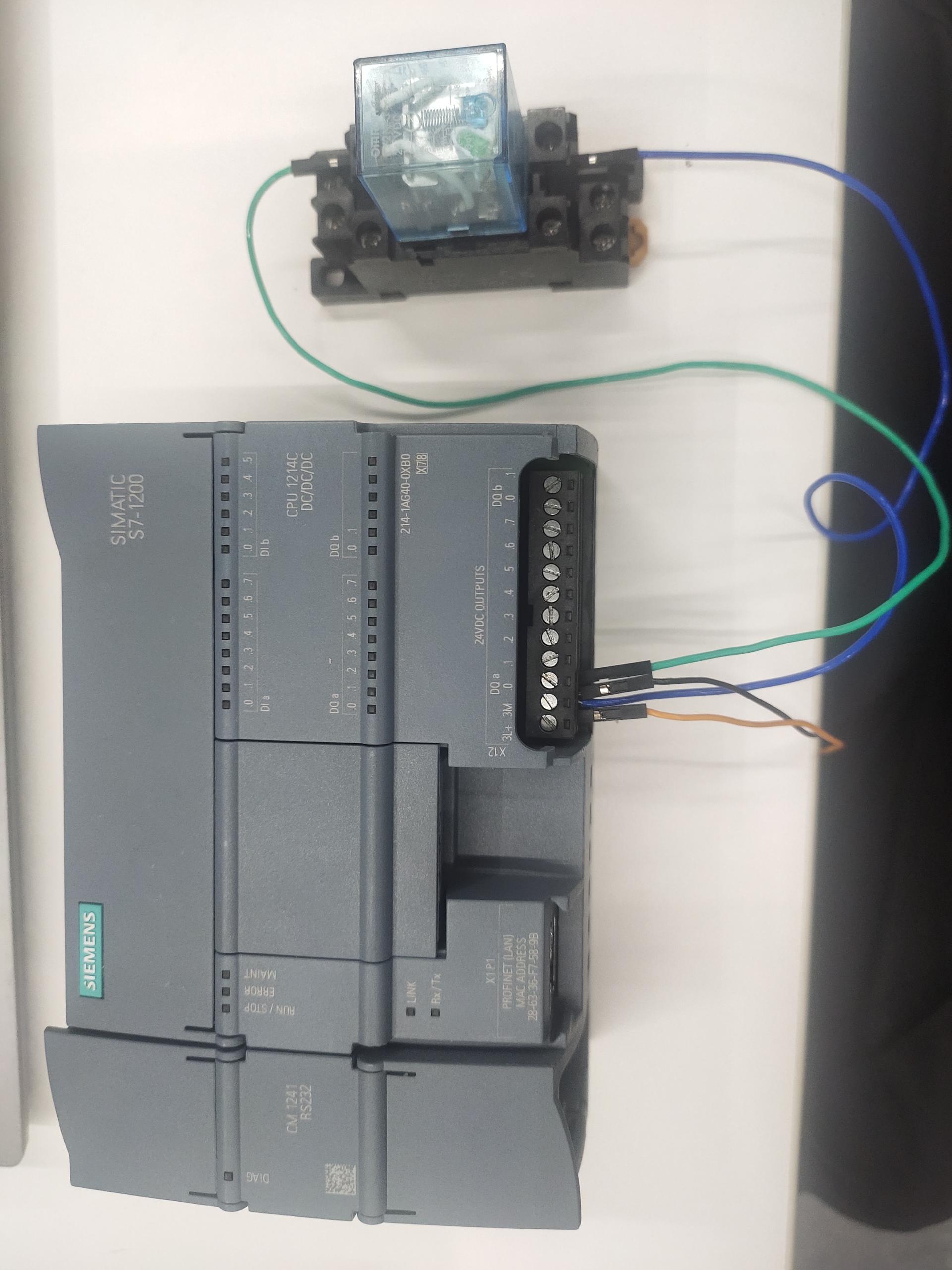
整体连接示意图
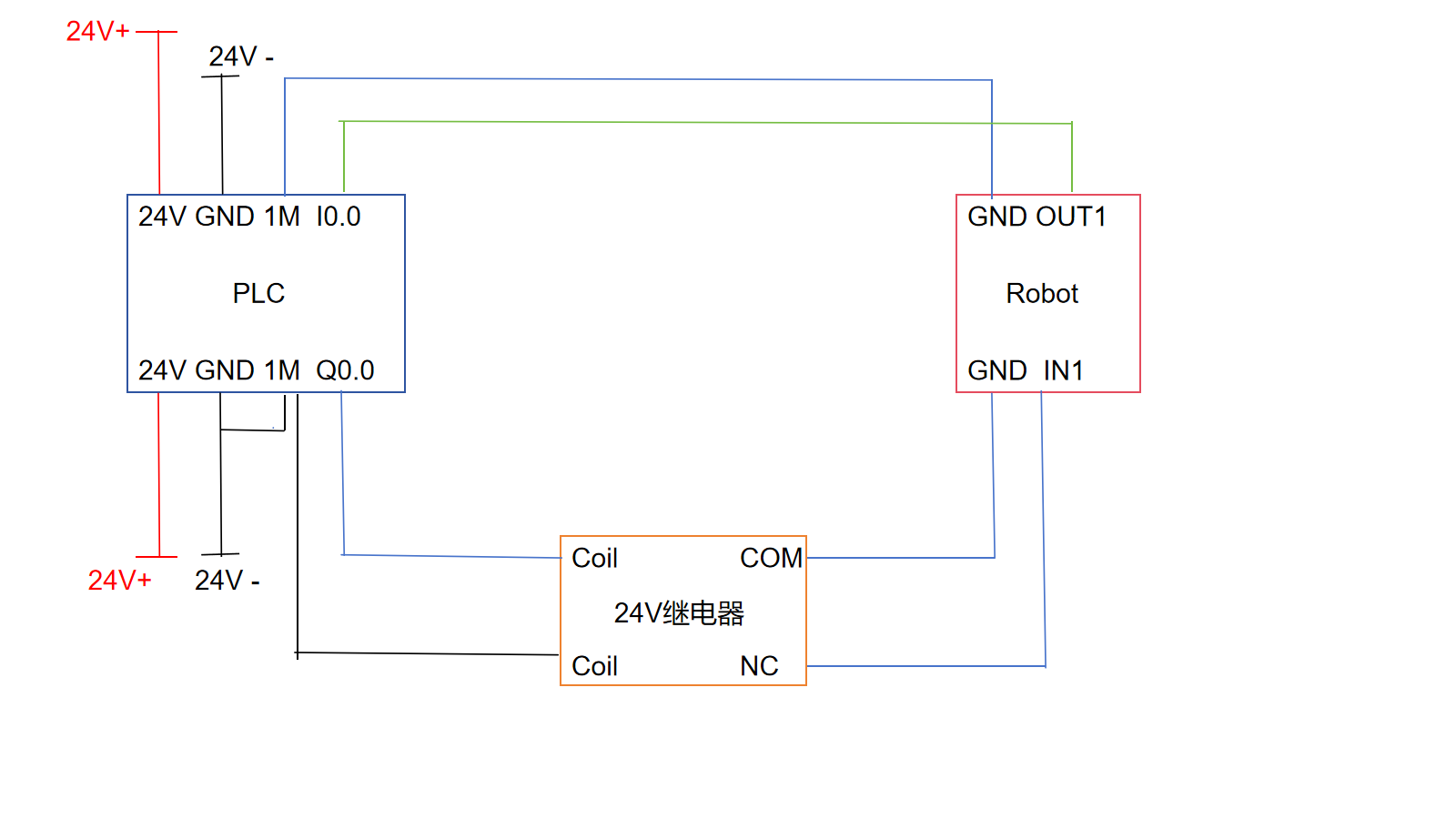
机械臂的输入与PLC的输出接线
PLC为西门子1200,PLC的输出类型是PNP,机械臂的输入类型是NPN,所以需要外接一个中间继电器,用来转换信号。先给PLC输出接入24V
 再给将继电器的线圈接入到PLC的公共端和Q0.0上
再给将继电器的线圈接入到PLC的公共端和Q0.0上

 再将继电器常开触点的线接到端子上
再将继电器常开触点的线接到端子上
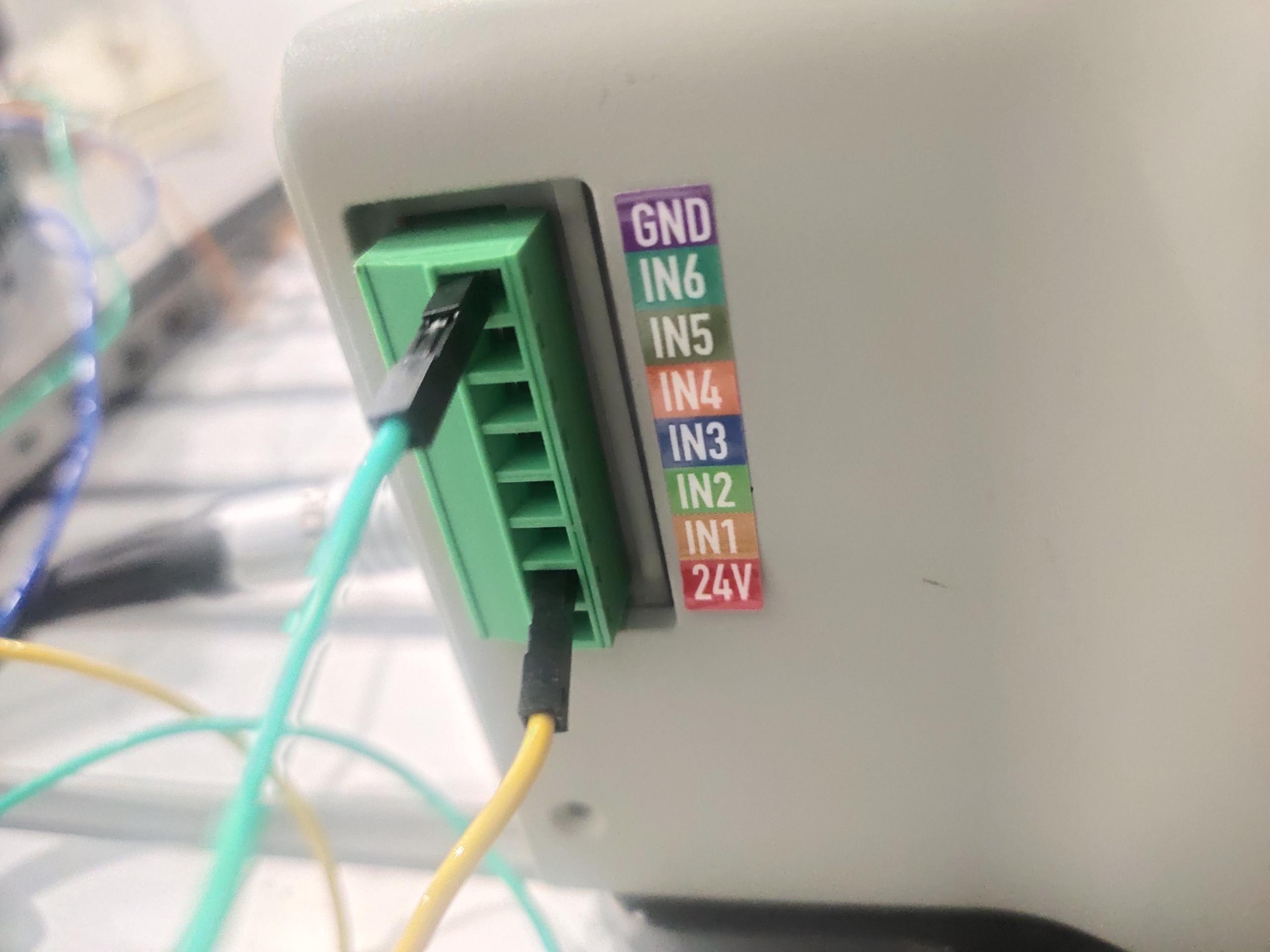
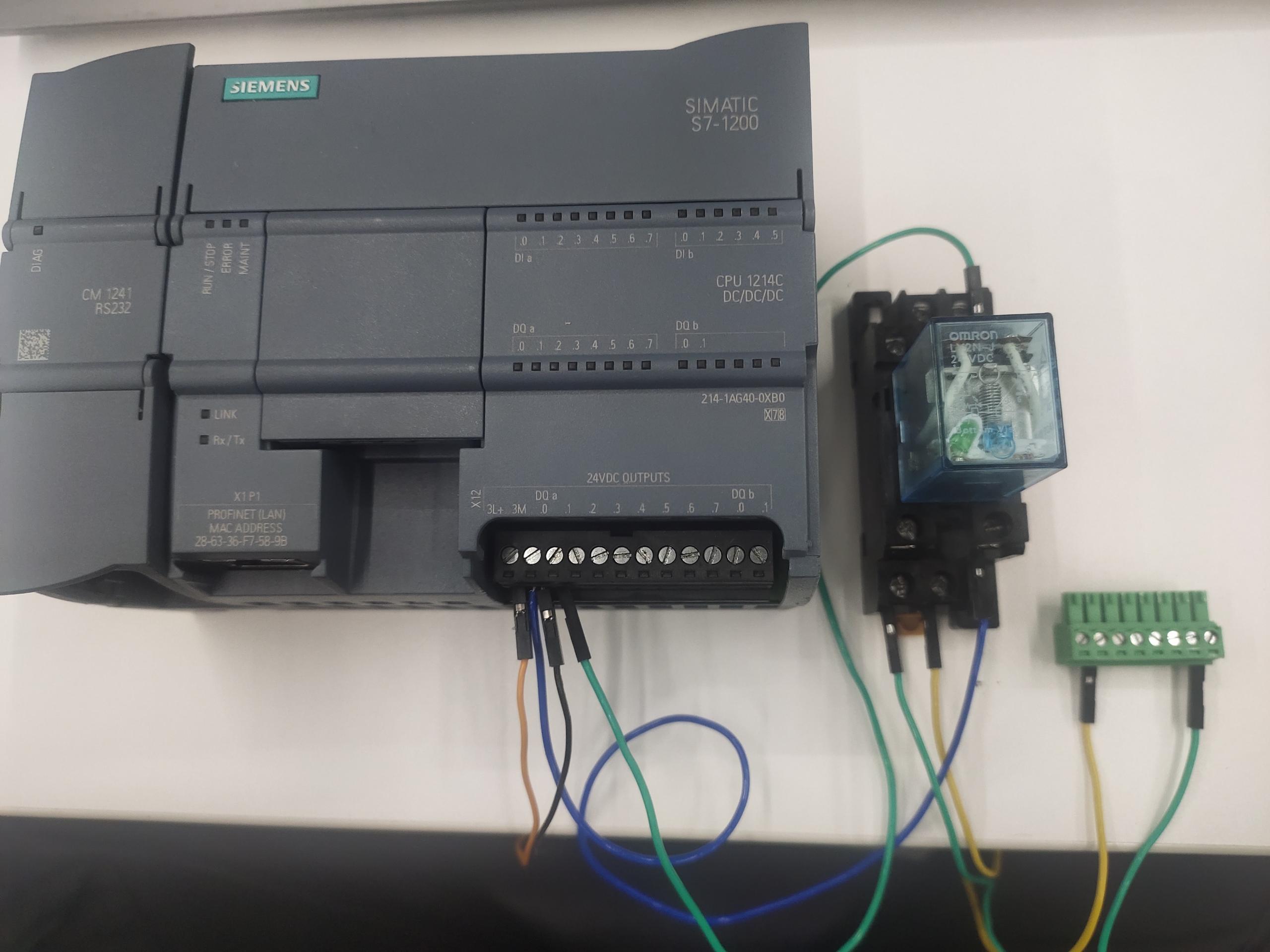 再将端子接入机器人的输入上
再将端子接入机器人的输入上
机械臂的输出与PLC的输入接线
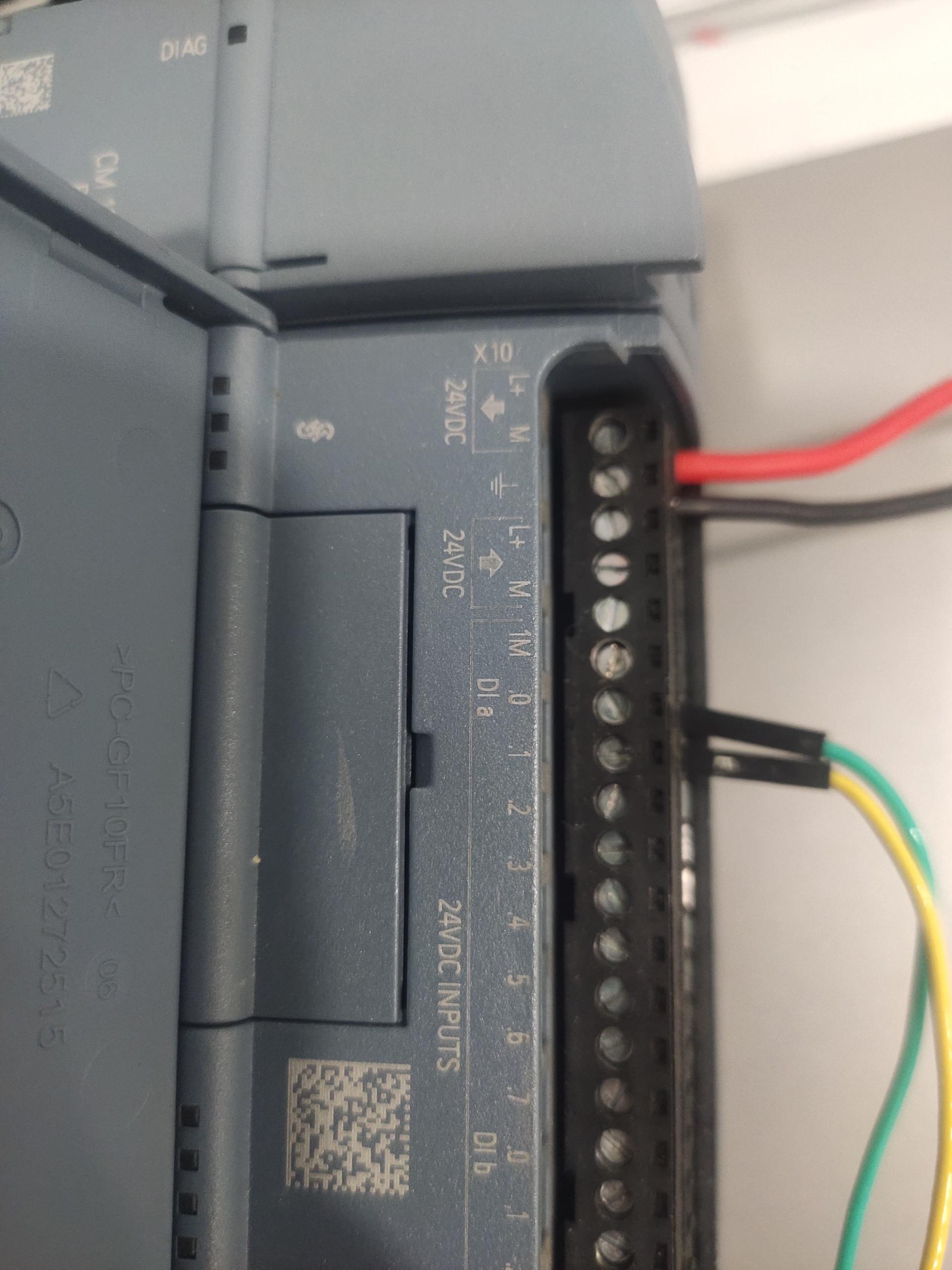
PLC为西门子1200,PLC的输入类型支持PNP或NPN,机械臂的输出类型是PNP,所以PLC的输入采取PNP型接法,先给PLC输入端接入24V
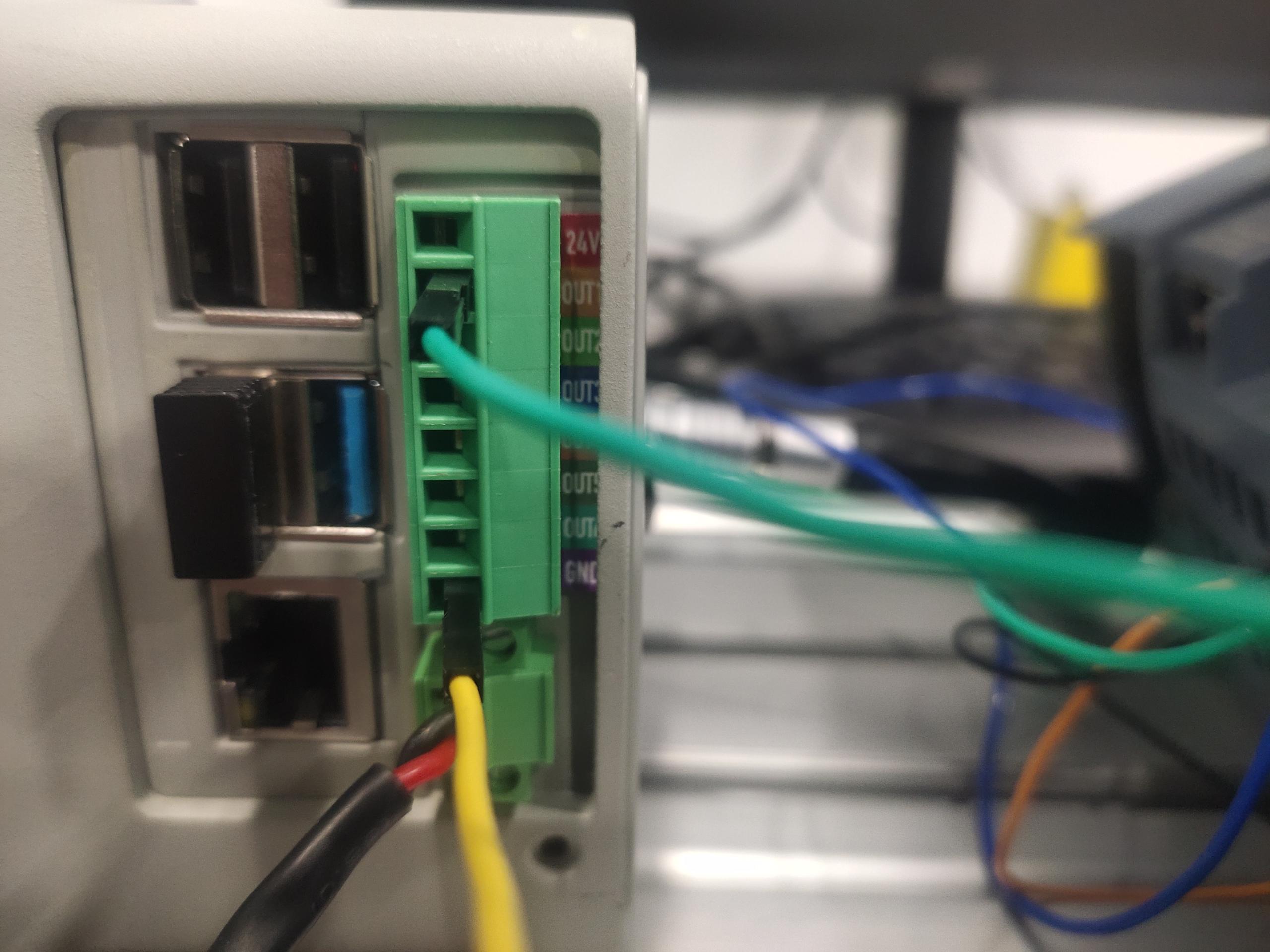
 再将机械臂的GND和OUT1接到PLC的公共端和I0.0上
再将机械臂的GND和OUT1接到PLC的公共端和I0.0上
 再将端子插入机械臂的输出上
再将端子插入机械臂的输出上
4 软件编程
机械臂程序
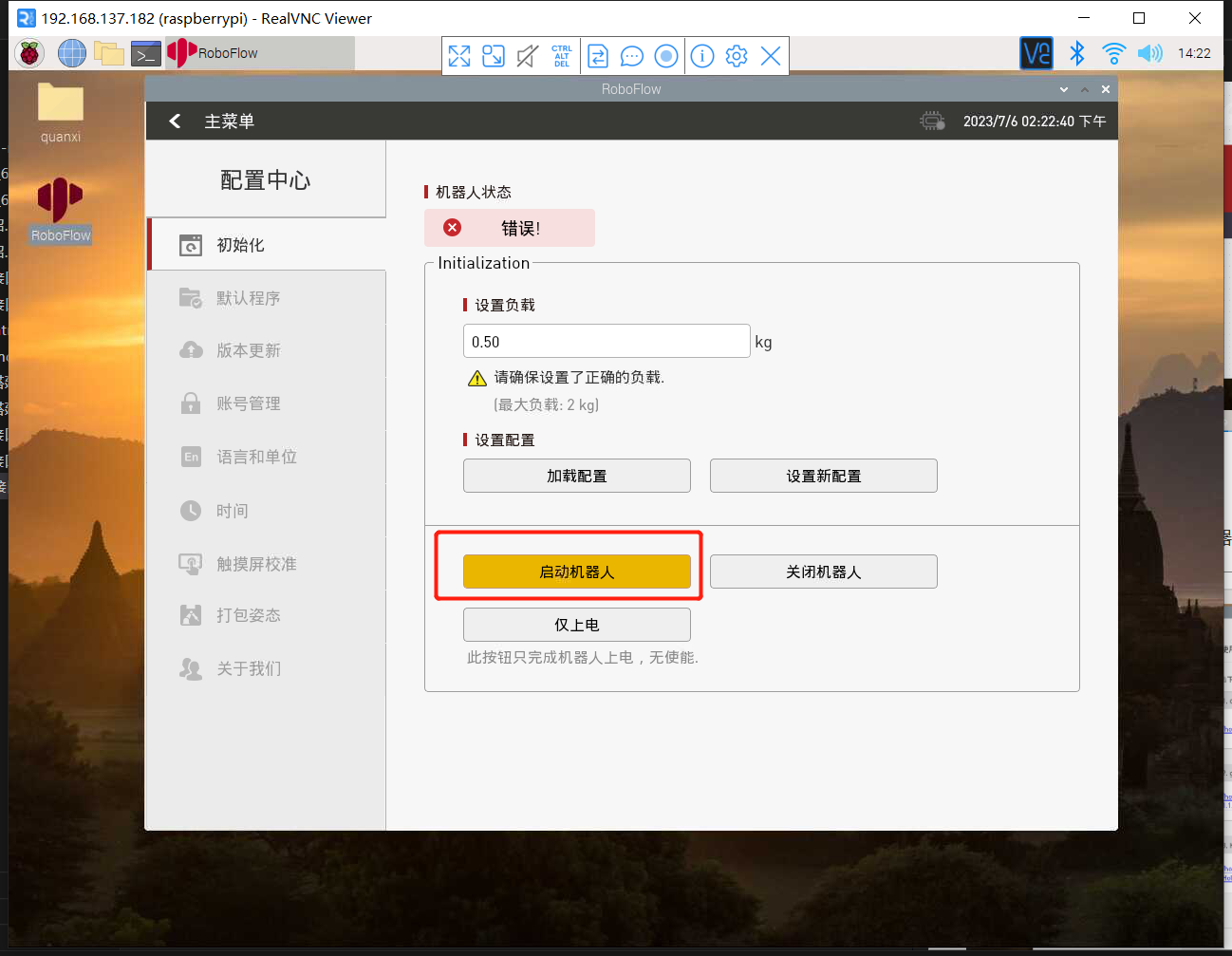
使用前需要先启动机器人系统

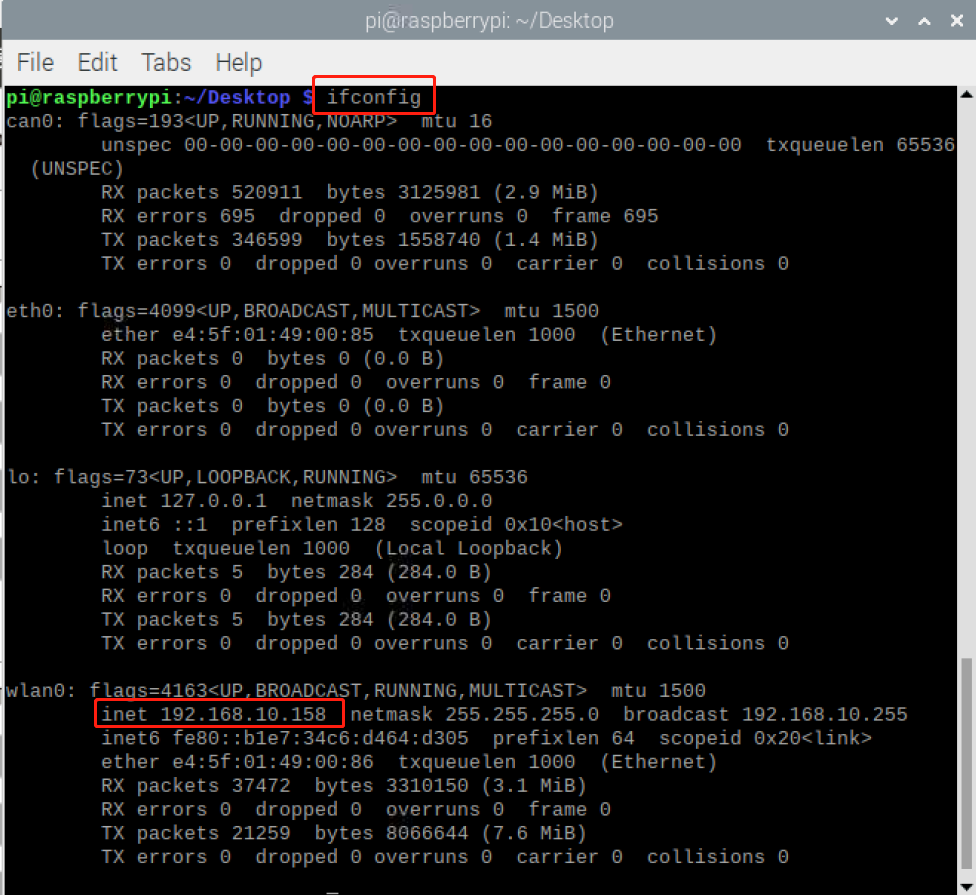
确认机械臂的IP地址:终端输入 ifconfig 获取
from pymycobot import ElephantRobot
import time
# 将ip更改成P600树莓派的实时ip
elephant_client = ElephantRobot("192.168.10.158", 5001)
# 启动机器人必要指令
elephant_client.start_client()
time.sleep(1)
elephant_client.set_digital_out(0,1)
time.sleep(1)
while True:
if elephant_client.get_digital_in(0)=='1':
elephant_client.write_angles([0,-90,0,0,-90,0],1500)
elephant_client.command_wait_done()
break
else:
pass
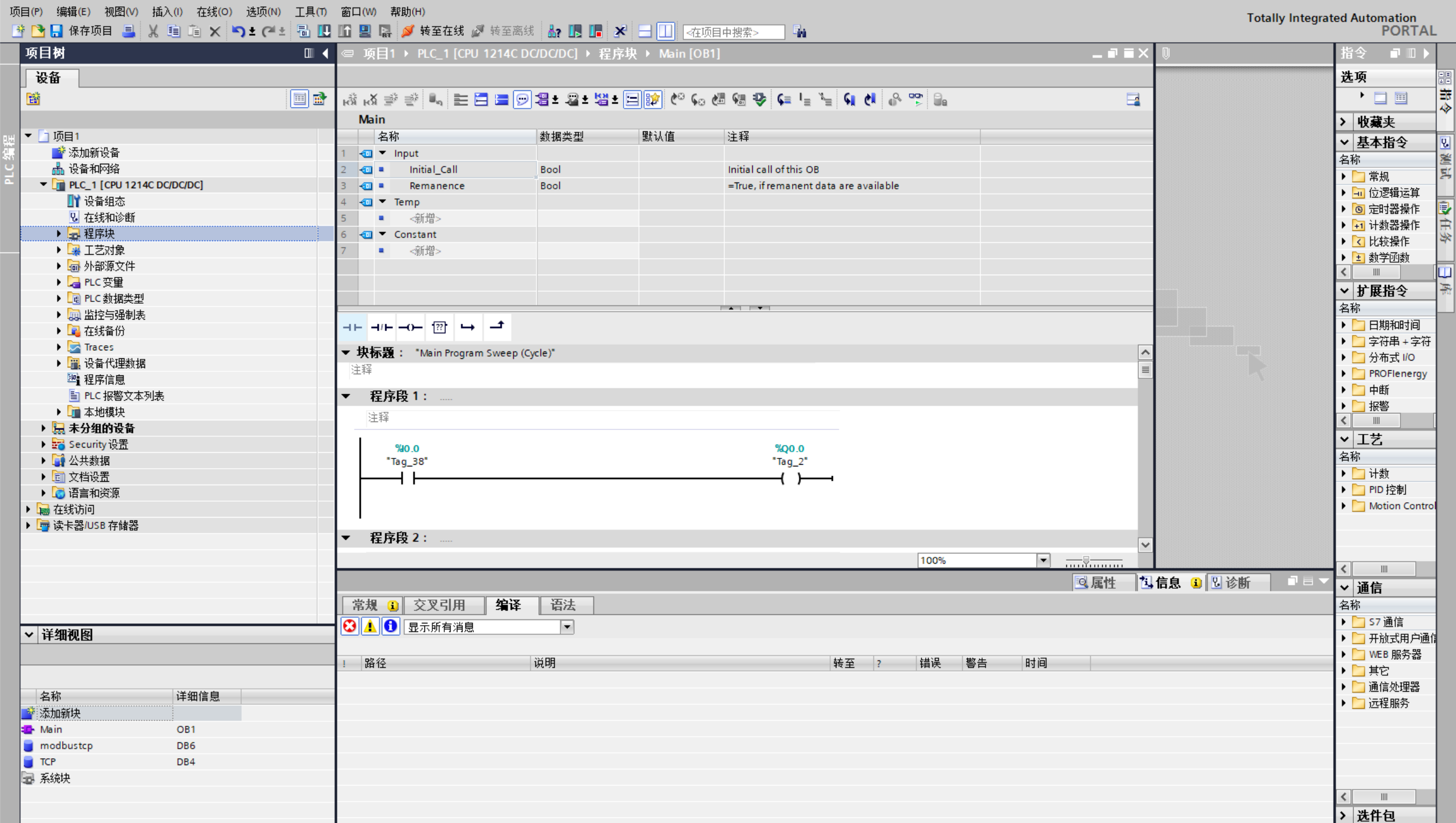
PLC端的程序
5 效果展示