Adaptive Gripper
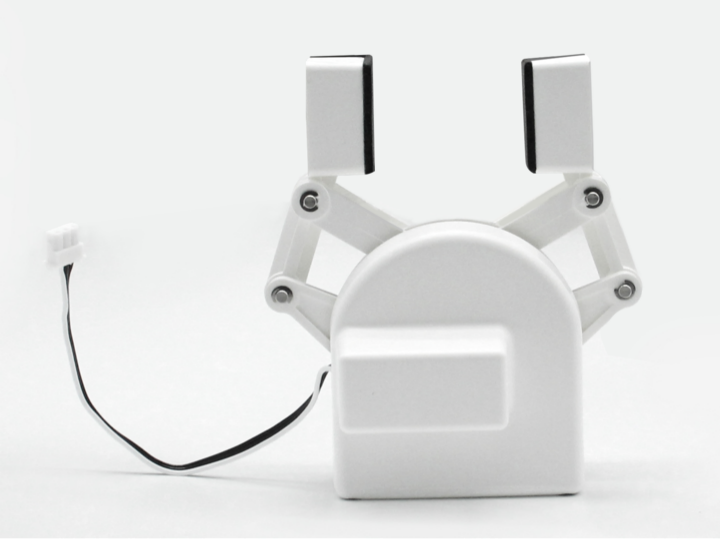
Product Image
Specifications:
| Name | myCobot Adaptive Gripper |
|---|---|
| Model | myCobot_gripperAg_white |
| Process | ABS Injection Molding |
| Color | White |
| Gripping Range | 20-45mm |
| Maximum Gripping Force | 150g |
| Repeatability | 1mm |
| Service Life | One Year |
| Drive Mode | Electric |
| Transmission Mode | Gear + Connecting Rod |
| Dimensions | 112 × 94 × 50mm |
| Weight | 110g |
| Mounting Method | LEGO Connector |
| Operating Environment | Normal Temperature and Pressure |
| Control Interface | Serial Control |
| Applicable Devices | ER myCobot 280 Series, ER myPalletizer 260 Series, ER mechArm 270 Series, ER myBuddy 280 Series |
Adaptive Gripper: For gripping objects
Introduction
- A gripper is a robotic component that performs functions similar to a human hand. Its complex structure offers advantages such as a secure grip, resistance to drops, and ease of operation. The gripper kit includes the gripper components and LEGO technology. A programmable system controls the robotic arm's end effector, enabling functions such as gripping and multi-point positioning. The gripper can be used in all development environments, including ROS, Arduino, and Roboflow.
Operating Principle
- Driven by a motor, the gripper's finger surface moves in a linear reciprocating motion to open and close. The electric gripper's acceleration and deceleration are controllable, minimizing impact on the workpiece. The positioning point and gripping position are controllable.
Applicable Objects
- Small cubes
- Small balls
- Long objects
Installation and Usage
Check that the accessories package contains the following: LEGO connector, gripper with cable, and extension cable.
Gripper Installation:
Structural Installation:
- Insert the LEGO connector into the pre-installed socket on the gripper. You can choose to install it in two different orientations depending on your needs:

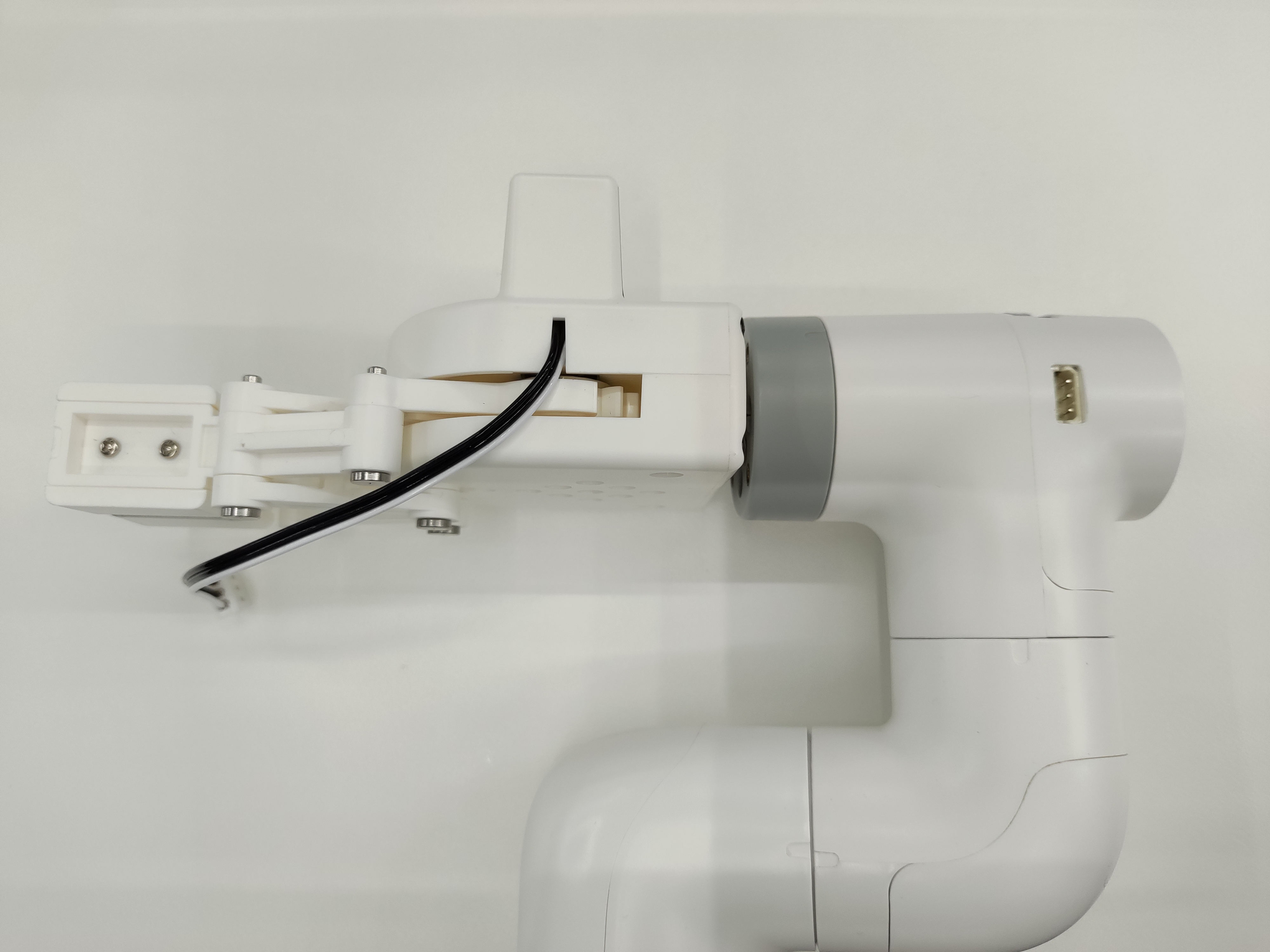
- Align the gripper with the connector inserted into the socket on the end of the robot arm and insert it:
Electrical Connections:
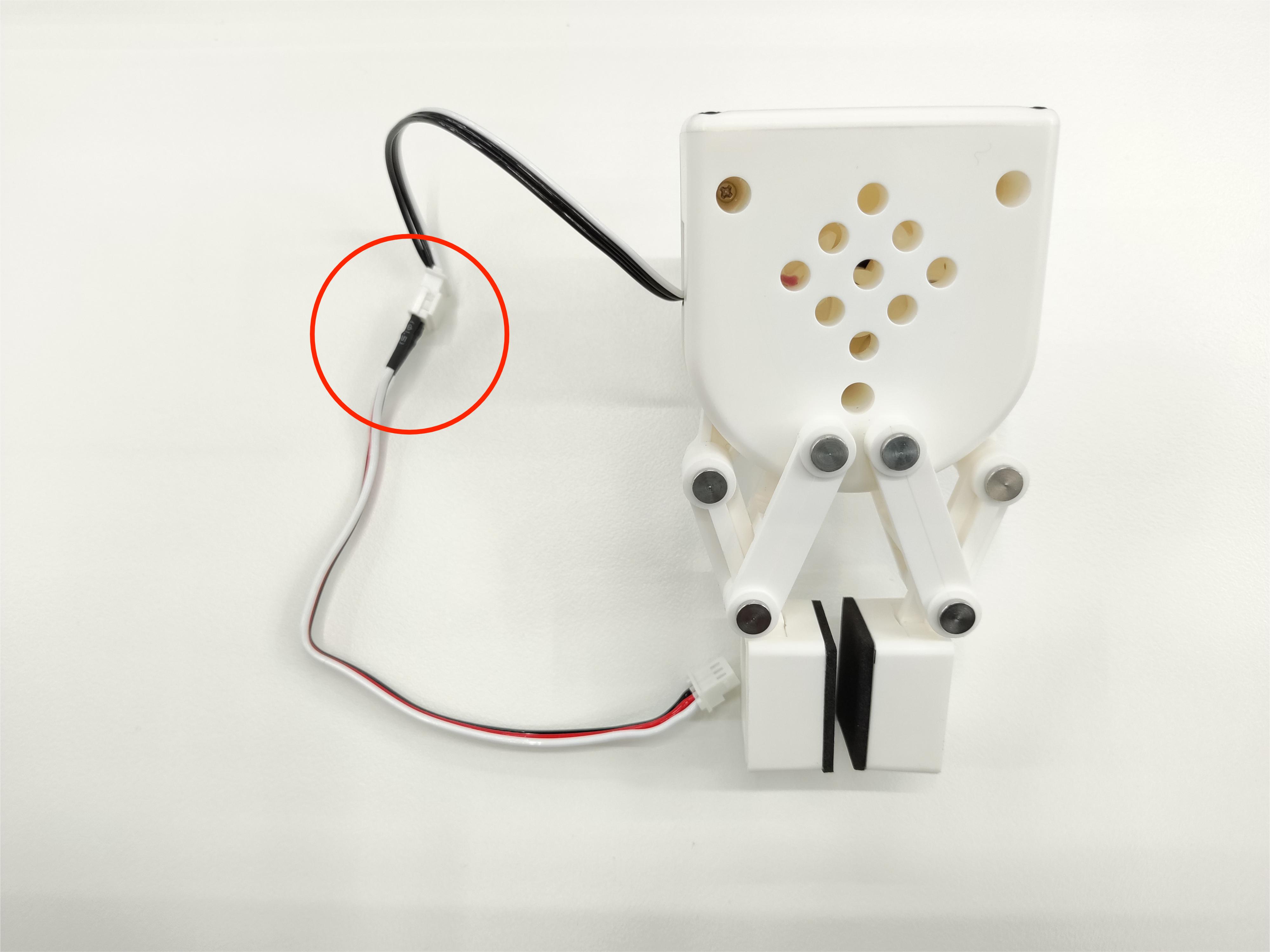
- Connect the extension cable to the gripper:
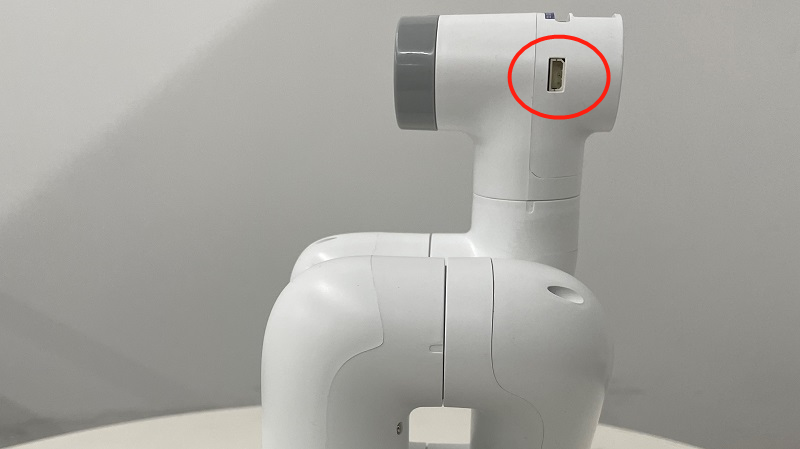
- Inserting the Robot Arm Control Interface:
Programming Development:
Using Python to Program the Gripper
M5 Version:
from pymycobot import MyCobot280 import time # Initialize a MyCobot280 object mc = MyCobot280("COM3", 115200) # The following three methods can all control the gripper's open-close-open state. # Method 1: mc.set_gripper_state(0, 80) time.sleep(3) mc.set_gripper_state(1, 80) time.sleep(3) mc.set_gripper_state(0, 80) time.sleep(3) # Method 2: # mc.set_gripper_value(100, 80) # time.sleep(3) # mc.set_gripper_value(0, 80) # time.sleep(3) # mc.set_gripper_value(100, 80) # time.sleep(3) # Method 3: # mc.set_encoder(7, 2048) # time.sleep(3) # mc.set_encoder(7, 1500) # time.sleep(3) # mc.set_encoder(7, 2048) # time.sleep(3)280-Pi version:
from pymycobot import MyCobot280 from pymycobot import PI_PORT, PI_BAUD # When using the Raspberry Pi version of mycobot, you can reference these two variables to initialize MyCobot280 import time # Initialize a MyCobot280 object mc = MyCobot280(PI_PORT, PI_BAUD) # The following three methods can all control the gripper's open-close-open state. # Method 1: mc.set_gripper_state(0, 80) time.sleep(3) mc.set_gripper_state(1, 80) time.sleep(3) mc.set_gripper_state(0, 80) time.sleep(3) # Method 2: # mc.set_gripper_value(100, 80) # time.sleep(3) # mc.set_gripper_value(0, 80) # time.sleep(3) # mc.set_gripper_value(100, 80) # time.sleep(3) # Method 3: # mc.set_encoder(7, 2048) # time.sleep(3) # mc.set_encoder(7, 1500) # time.sleep(3) # mc.set_encoder(7, 2048) # time.sleep(3)
Save the file and close it, then return to the command line terminal and enter:
python grip.pyYou can see the jaws open-close-open