myCobot 280 algorithm
1 Structural Parameters
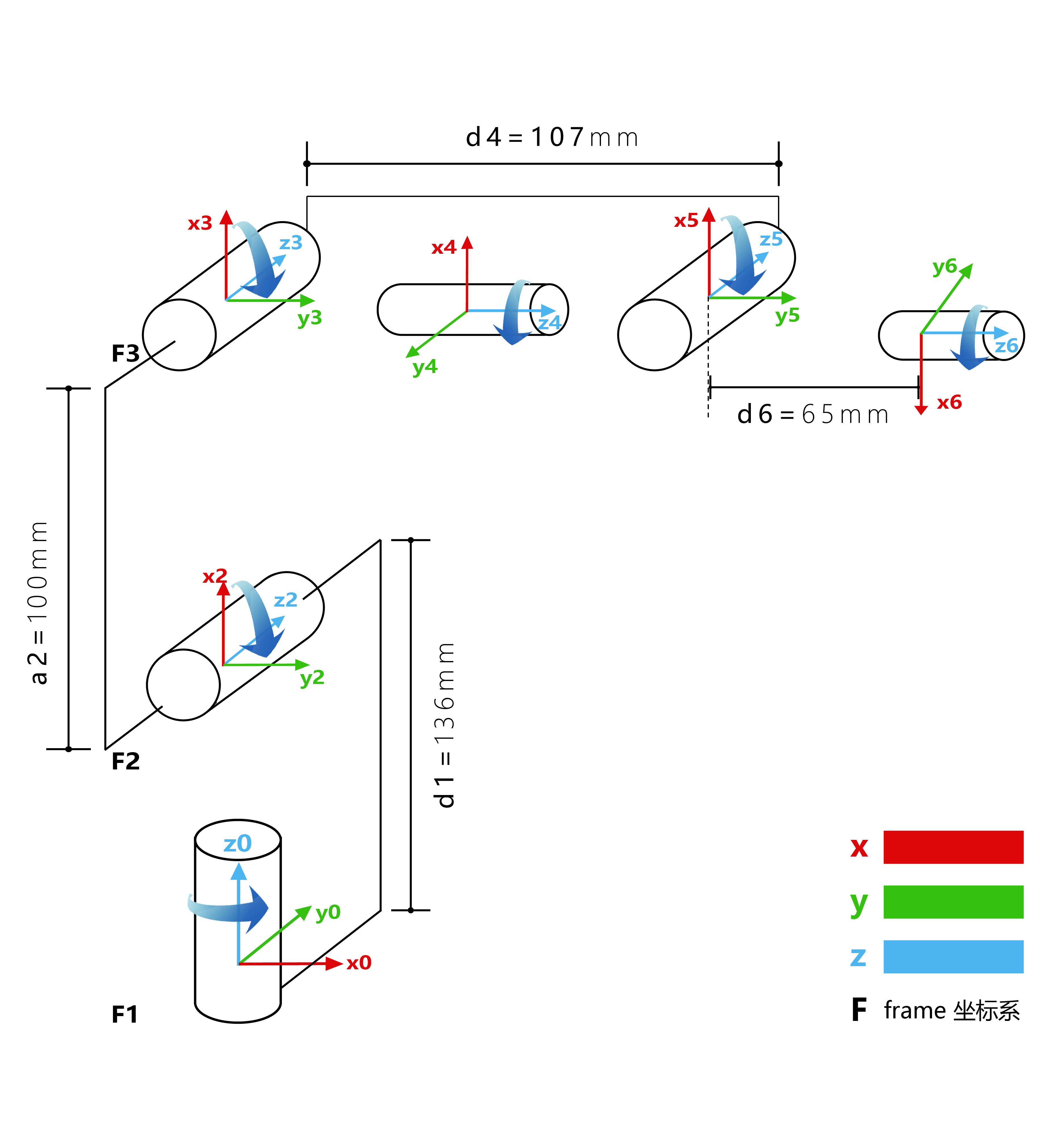
1.1 Robotic Arm DH Parameters
| joint | theta | d | a | alpha | offset |
|---|---|---|---|---|---|
| 1 | q1 | 131.22 | 0 | 1.5708 | 0 |
| 2 | q2 | 0 | -110.4 | 0 | -1.5708 |
| 3 | q3 | 0 | -96 | 0 | 0 |
| 4 | q4 | 63.4 | 0 | 1.5708 | -1.5708 |
| 5 | q5 | 75.05 | 0 | -1.5708 | 1.5708 |
| 6 | q6 | 45.6 | 0 | 0 | 0 |
1.2 Kinematic Model
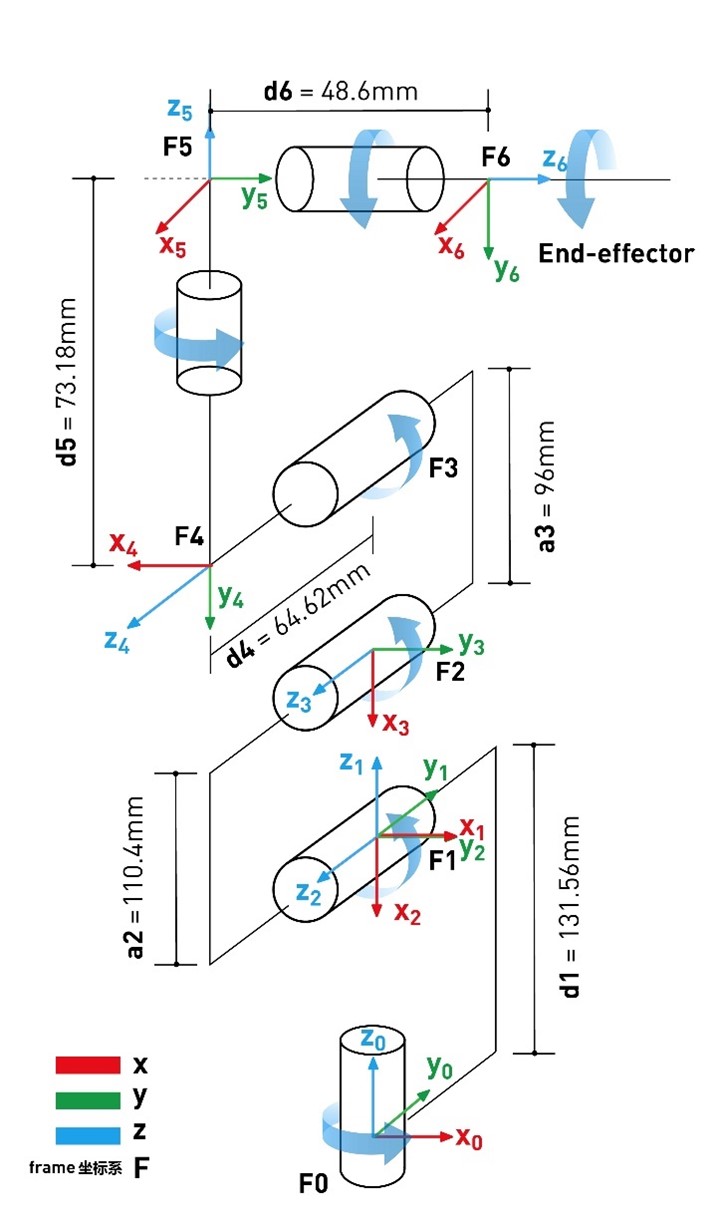
MechArm 270 algorithm
DH Parameters