机械臂的控制
1 滑块控制
打开一个ROS1环境终端,然后运行命令:
roslaunch mercury_b1 slider_control.launch
它将打开 rviz 和一个滑块组件,你将看到如下画面:
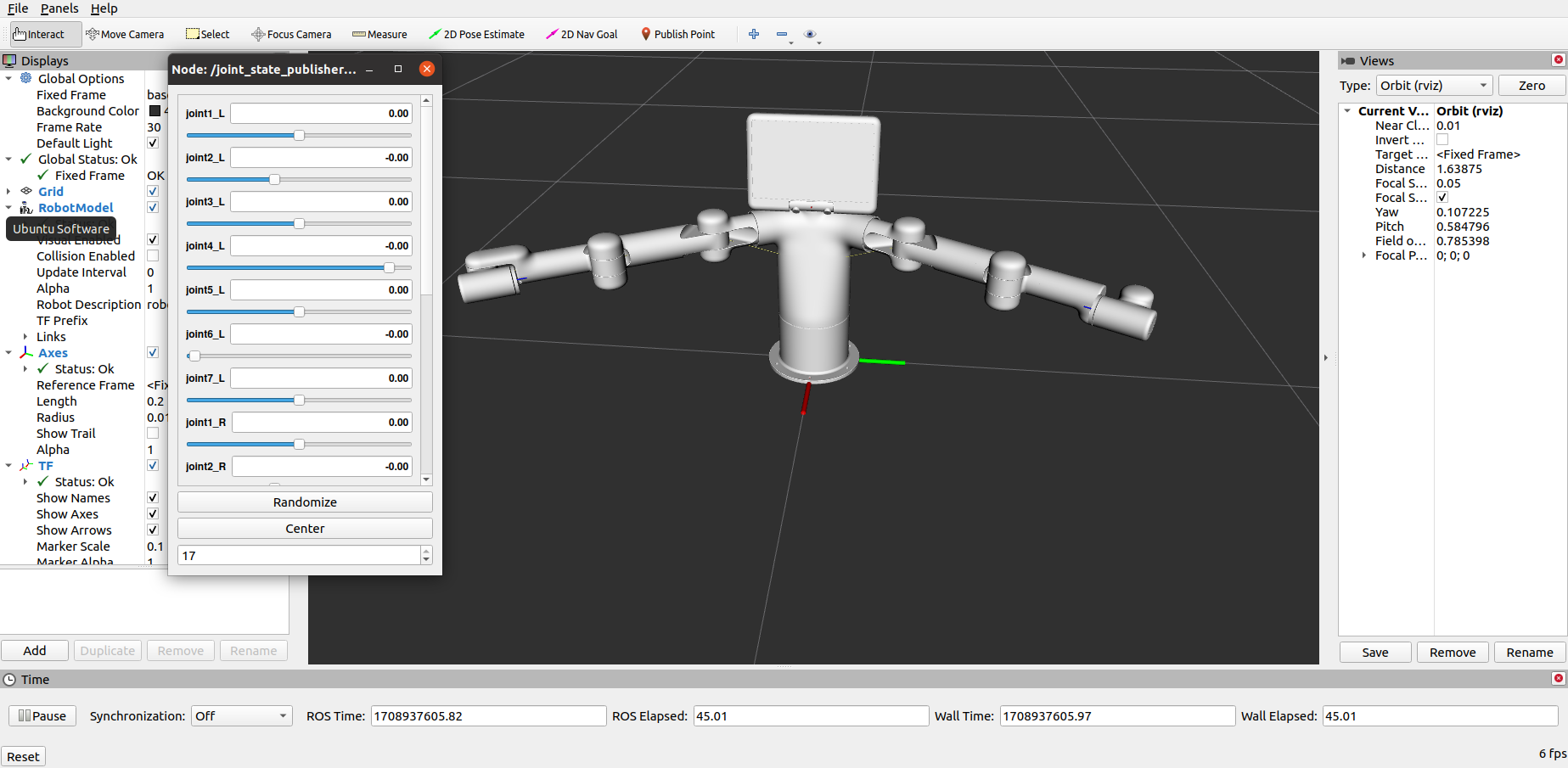
接着你可以通过拖动滑块来控制 rviz 中的模型移动。如果你想让真实的 Mercury B1 跟着一起运动,需要再打开一个ROS1环境终端,然后运行命令:
rosrun mercury_b1 slider_control.py
请注意:由于在命令输入的同时机械臂会移动到模型目前的位置,在您使用命令之前请确保rviz中的模型没有出现穿模现象 不要在连接机械臂后做出快速拖动滑块的行为,防止机械臂损坏
2 模型跟随
除了上面的控制,我们也可以让模型跟随真实的机械臂运动。打开一个ROS1环境终端,然后运行命令:
rosrun mercury_b1 follow_display.py
然后打开另一个ROS1环境终端,然后运行命令:
roslaunch mercury_b1 mercury_follow.launch
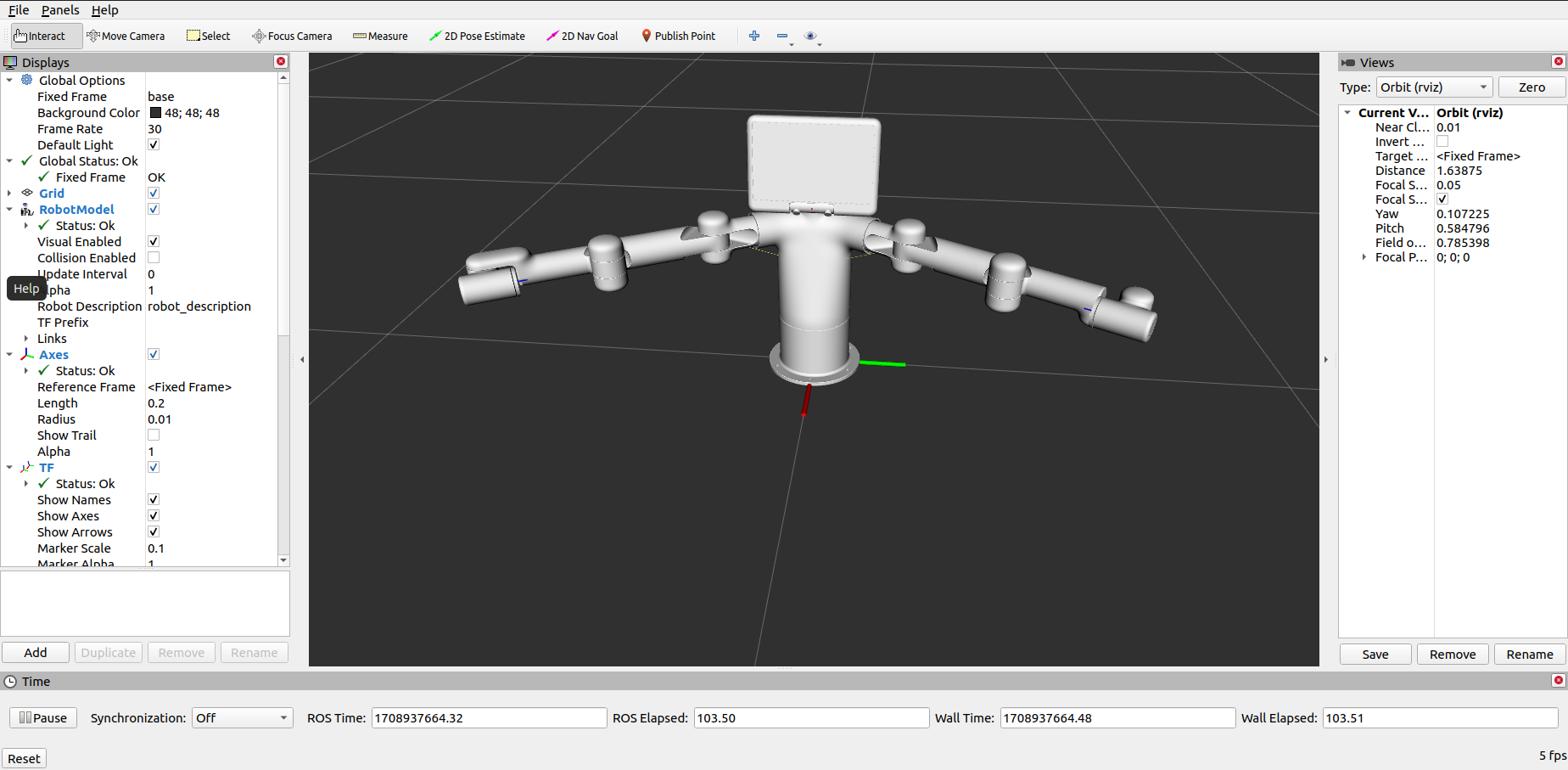
它将打开 rviz 展示模型跟随效果。
3 Moveit使用
mercury_b1 现已集成了 MoveIt 部分。
打开一个ROS1环境终端,然后运行命令:
roslaunch mercury_b1_moveit mercury_b1.launch
如果需要让真实的机械臂同步执行计划,需要再打开一个ROS1环境终端,然后运行命令:
rosrun mercury_b1_moveit sync_plan.py
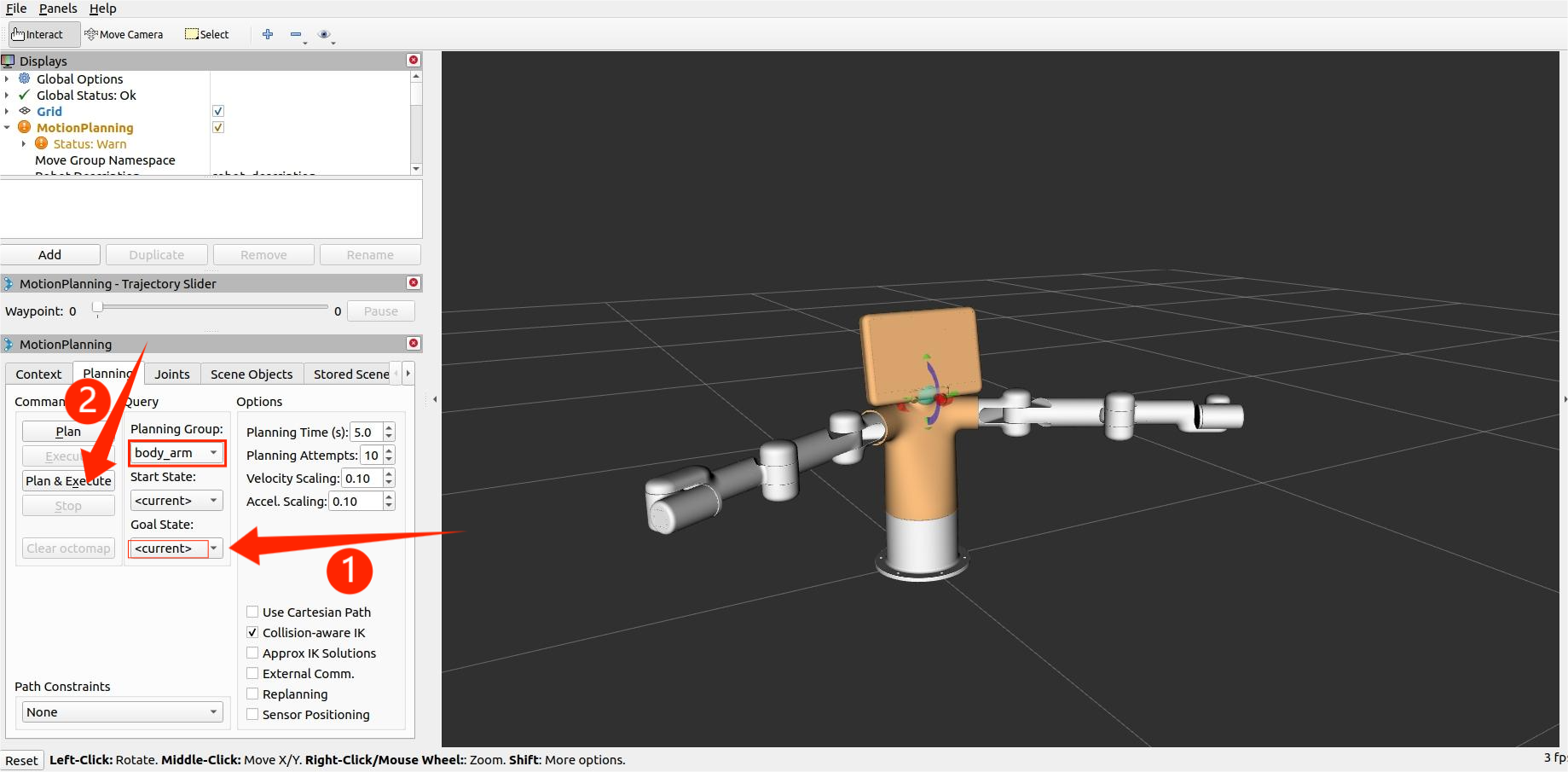
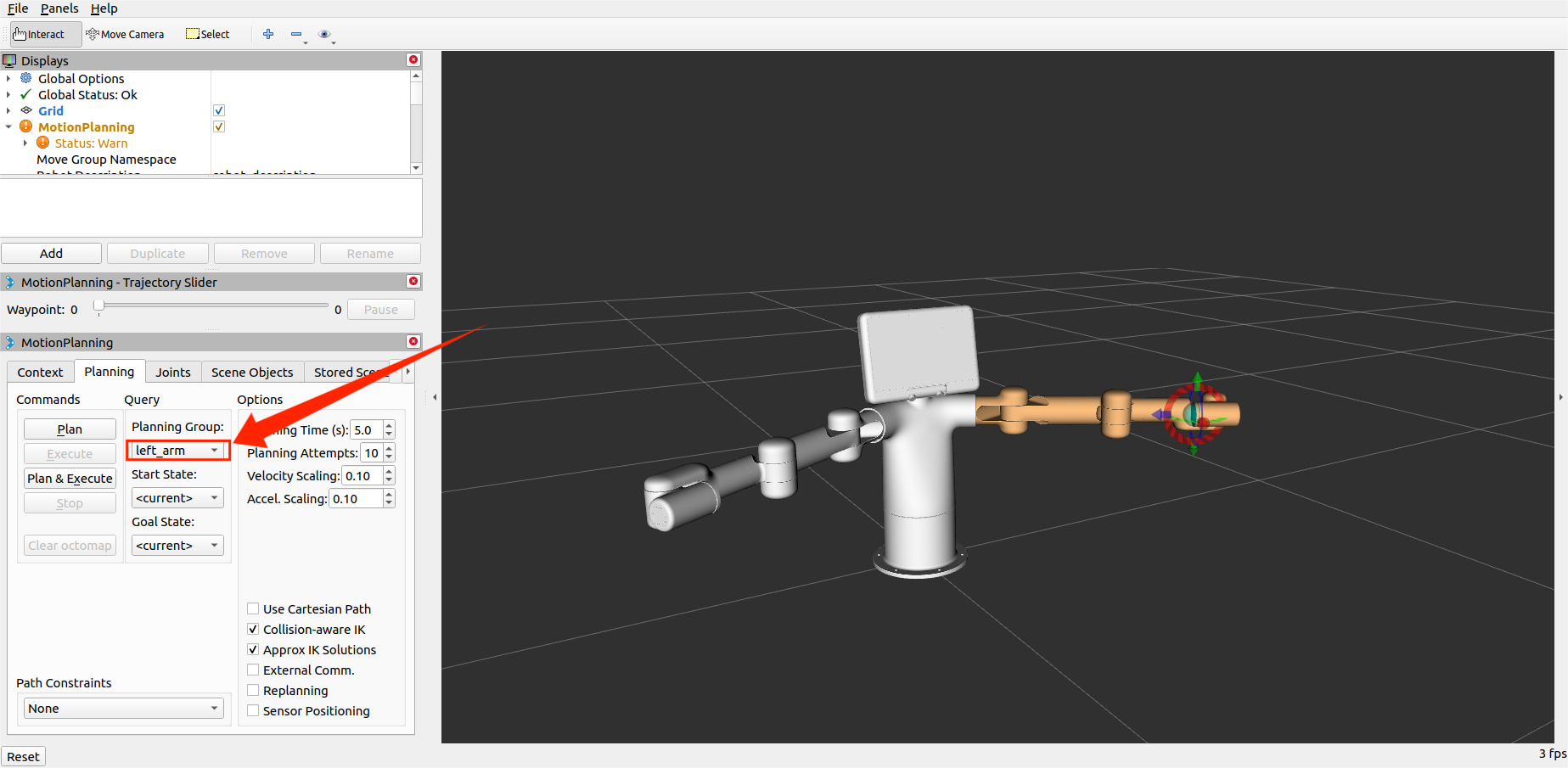
Moveit 的控制组有三个,运行效果如下:
1.左臂控制组: 通过拖动轨迹球来规划左臂的运动方向,再执行规划。
2.右臂控制组: 通过拖动轨迹球来规划右臂的运动方向,再执行规划。
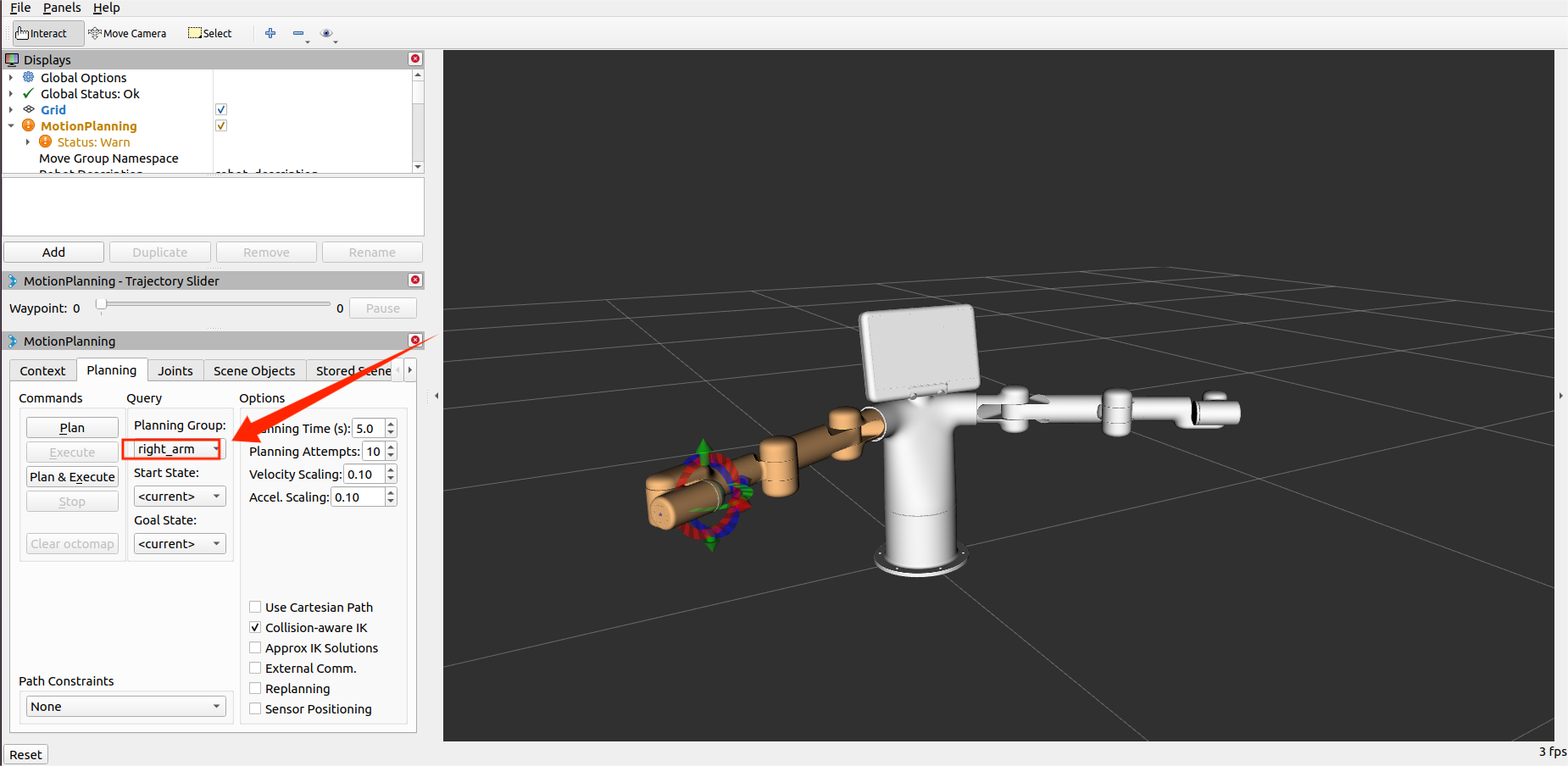
3.腰部控制组: 可以通过设置目标姿态,再执行规划。