第四章 首次使用
1.产品标准清单
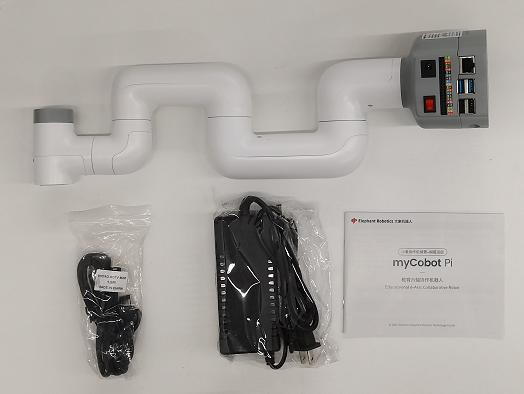
1.1产品列表图片
感谢您选择大象机器人myCobot 280 For Arduino机械臂,本章节内容旨在帮助您轻松上手大象机器人产品,享受产品带来的每一个精彩瞬间。
1.2产品标准清单对照表
| 序列号 | 产品 |
|---|---|
| 1 | myCobot机械臂(型号myCobot 280 For Arduino) |
| 2 | myCobot机械臂-产品画册 |
| 3 | myCobot机械臂-配套电源线 |
| 4 | USB-Type C |
| 5 | 杜邦线若干 |
注: 包装箱到位后,请确认机器人包装完好无损。如有损坏,请及时联系物流公司和您所在地区的供应商。开箱后,请根据物品清单检查箱内的实际物品。
2.产品开箱指南
2.1产品开箱图文引导
为什么需要按照步骤拆卸产品
在本节中,我们强烈建议按照指定步骤拆卸产品。这不仅有助于确保产品在运输过程中不受损害,还能将意外故障的风险降至最低。请仔细阅读以下图解指南,以确保您的产品在开箱过程中的安全。
1 检查包装箱是否损坏。如有损坏或配件缺失,请及时联系物流公司和您所在地区的供应商。
2 打开包装盒,取出产品宣传册、海绵包装盖、myCobot 机器人手臂、配套电源、平板底座和附件包。
3 确保每一步都完成后再进行下一步,以防止不必要的损坏或遗漏。
注: 取出产品后,请仔细检查每件物品的外观。请对照物品清单检查包装箱中的实际物品。
3.开机检测指南
3.1结构安装和固定
在 机械臂 的运动过程中,如果不将 myCobot 的底面与桌面或其他底面相连,仍然会造成 myCobot 的 摇晃或倾覆。
常见的固定机械臂的方式有三种:
1) 使用乐高插键固定在具有乐高接口的底座上
我们销售的底座有 2 种:平面吸盘底座与 G 型夹底座
 平面底座 适配型号:myCobot 280
平面底座 适配型号:myCobot 280
- 在底座的四角安装吸盘并拧紧。
- 用附带的乐高科技件,连接平面底座和机械臂底部。
- 将四个吸盘固定在平整光滑平面后方可开始使用。
- 技巧: 可以适当在吸盘下加入少量不导电液体,以填补吸盘与桌面的缝隙,以获得最佳吸附效果。

G型底座 适配型号:myCobot 280系列、myPalletizer 260

用G形夹将底座固定在桌子边沿
用附带的乐高科技件,连接底座和机械臂底部
确定稳固后方可开始使用

2 myCobot 底座的螺丝孔位连接
需要将机器人固定在牢固机座上才可以正常使用。机座重量要求:固定式机座,或移动式机座。
请确定固定底座上有对应螺纹孔位,再进行安装。
正式进行安装前,请确认:
- 待安装环境符合以上《工作环境与条件》表格的要求。
- 安装位置不小于机器人工作范围,且留有足够大的安装、使用、维护、维修的空间。
- 将机座放置到合适位置。
安装相关工具已准备好,如螺丝、扳手等。 确认以上内容后,请将机器人搬运至机座安装台面上,调整机器人位置,将机器人基座固定孔位与机座安装台面上的孔位对准。对准孔位后,将螺丝对准孔位,拧紧即可。
注意:在机座安装台面上调整机器人位置时,请尽量避免在机座安装台面上直接推拉机器人,以免产生划痕。人工移动机器人时请尽量避免对机器人本体脆弱部分施加外力,以免造成机器人不必要的损伤。
4.上电与初步检测
机器人上电
操作前,请确认已阅读并确保已遵循第一章 安全须知的内容,确保操作安全。同时将电源适配器连接上机械臂,并将机械臂底座固定在桌子上。连接方式如图 3-1 所示:

图 3-1
myCobot 必须使用外部电源进行供电,以提供足够的电量:
- 额定电压: 12V
- 额定电流: 3-5A
- 插头类型: DC 5.5mm x 2.1
注意,不能仅仅使用插入M5Stack-basic的TypeC进行供电。使用官方适配的电源,以免对机械臂造成损害。
连接外部设备
与电脑通过USB连接
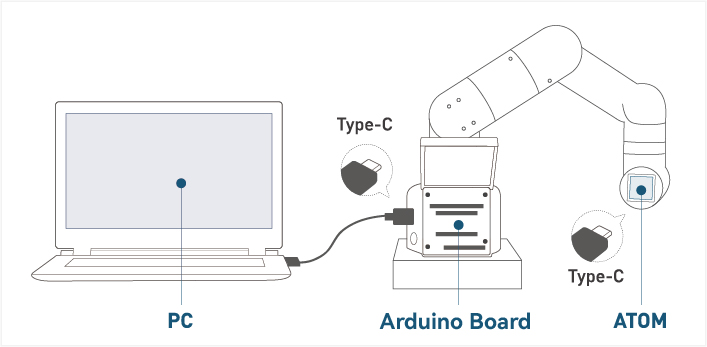
图 3-2 USB接口连示意图
机器人工作状态检测
开箱视频
如何进行零位校准操作
注意:请严格按照以下步骤进行
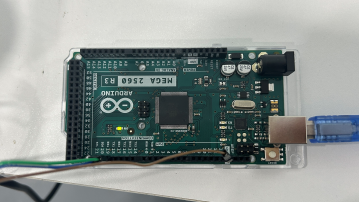
1、先给机械臂通电(如果绿灯亮起表示机械臂已经通电)

2、连接Arduino板子(连接位置如下图所示)

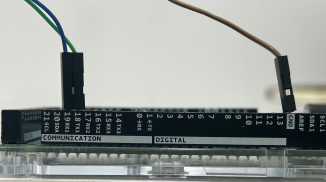
3、接通串口与电脑相连(如果绿灯亮起表示成功连接电脑)
接通后可按照以下步骤查看连接端口号
点击此电脑 --> 点击鼠标右键管理 --> 点击设备管理器 --> 点击端口

校准零位案例
from pymycobot.mycobot import MyCobot
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化,如不是可不填该行代码
import time
# 以上需写在代码开头,意为导入项目包
# MyCobot 类初始化需要两个参数:串口和波特率
# 第一个是串口字符串, 如:
# linux: "/dev/ttyUSB0"
# windows: "COM6"
# 第二个是波特率:
# M5版本为: 115200
# 以下为如:
# mycobot-M5:
# linux:
# mc = MyCobot("/dev/ttyUSB0", 115200)
# windows:
# mc = MyCobot("COM6", 115200)
# mycobot-raspi:
# mc = MyCobot(PI_PORT, PI_BAUD)
#
# 初始化一个MyCobot对象
# 下面为 windows版本创建对象代码
mc = MyCobot("COM6", 115200)
# 机械臂断电,放松关节
time.sleep(2)
mc.release_all_servos()
# 放松关节后,掰动机械臂,使机械臂零位刻度线对齐
time.sleep(2)
# 机械臂逐个关节校准
for i in range(1, 7):
mc.set_servo_calibration(i)
time.sleep(1)
# 机械臂上电,使机械臂锁紧
mc.power_on()
time.sleep(2)
# 打印所有关节角度
print(mc.get_angles())
time.sleep(1)
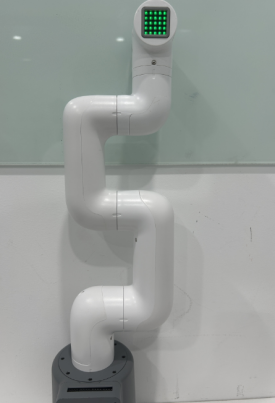
机械臂校准零位示例图(相邻关节零位刻度线对准即为关节零位)
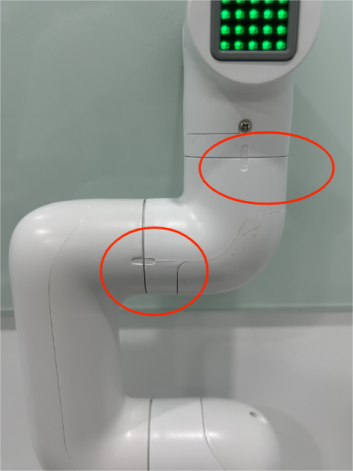
机械臂关节零位示例图
5.常见问题解决
本小节旨在帮助用户解决在使用过程中所遇到的常见问题,涵盖硬件、软件、驱动以及如何在论坛中提问这几个方面,如您在使用机械臂的过程中遇到问题,请首先阅读本小节的内容来寻求解决办法。如果列举出的问题无法帮助您解决并且您有更多售后问题想要咨询请添加售后小管家微信。