开发环境建设
1 如何构建环境
1 Arduino IDE 下载
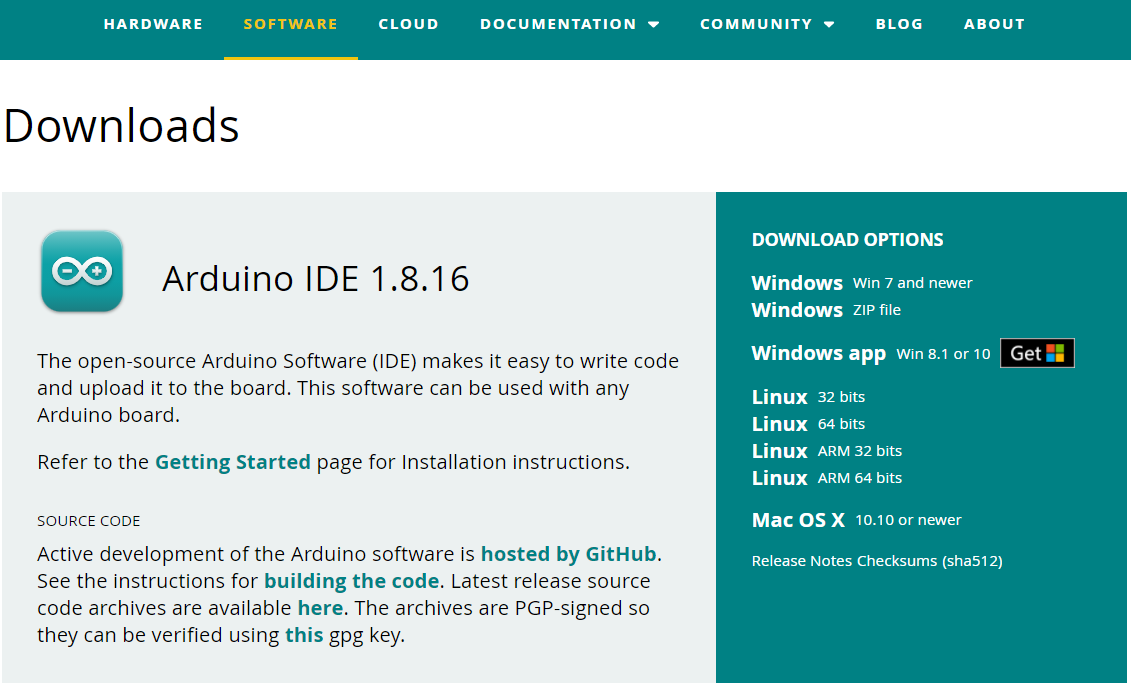
Arduino IDE Download Address
此处提供 IDE 1.8.16版本下载链接
2 已安装的驱动程序
刻录程序之前, M5Core主机 (包括 M5Stack-basic/GRAY/M5GO/FIRE/FACES在内) / 根据您使用的操作系统,对设备用户的微控制类型, 请下载相应的驱动程序包. 解压缩包后,选择相应OPERATION系统位的安装包.
对于Mac OS,确保系统设置正确 首选设置 --> 安全和隐私 --> 通用 并允许用户从App Store或经批准的开发人员处获取。
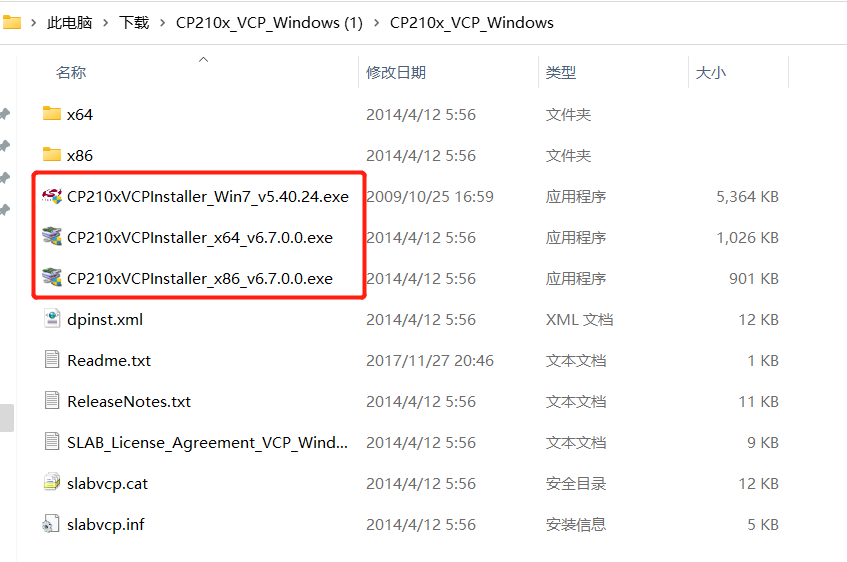
下载 M5Stack-basic串行端口驱动程序 CP210X 或 CP34X
CP210X
解压缩zip包后,根据计算机操作系统选择要安装的相应安装包(win10和win11选择x64或x86进行安装)。
CP34X
3 添加board
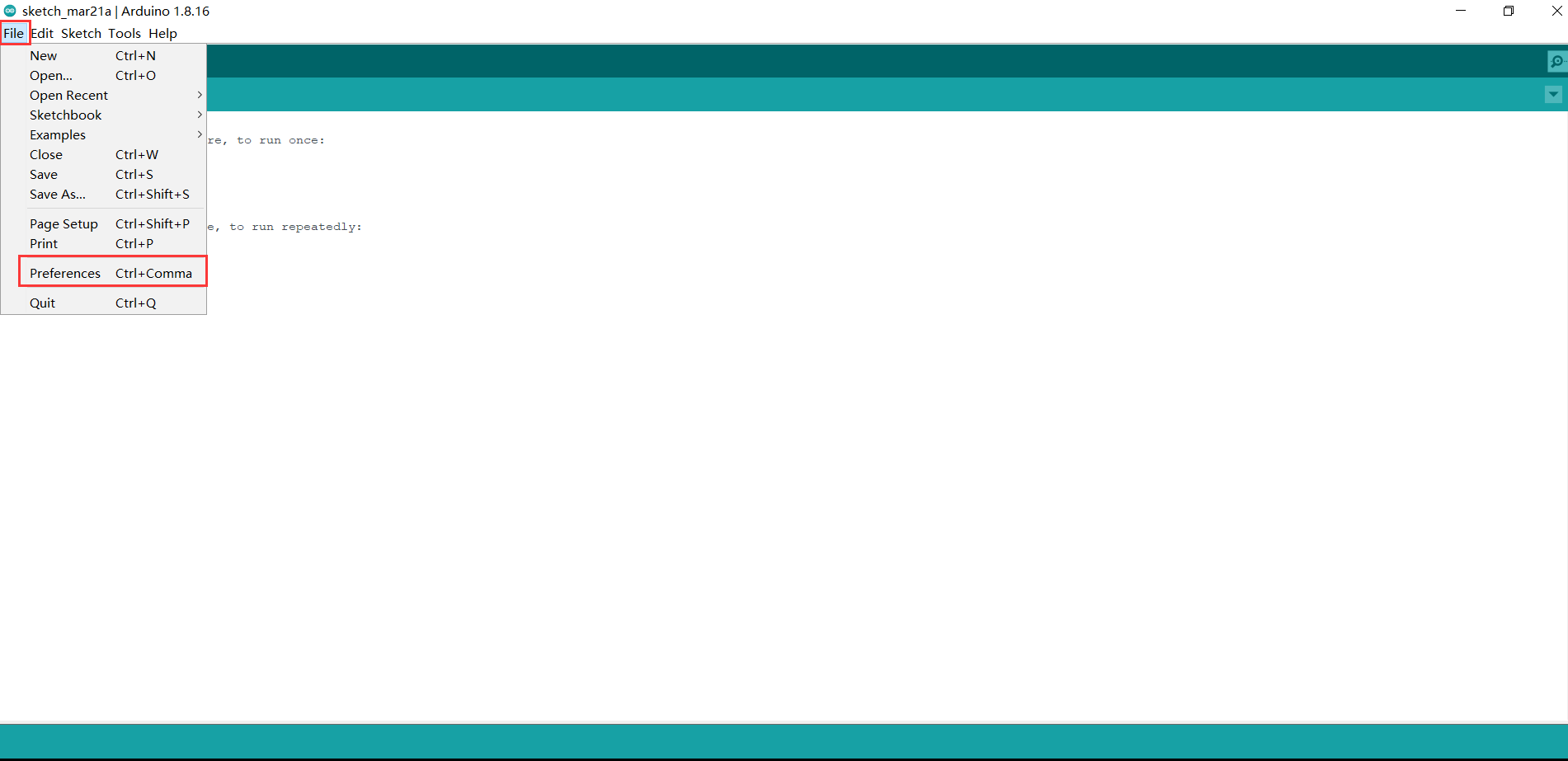
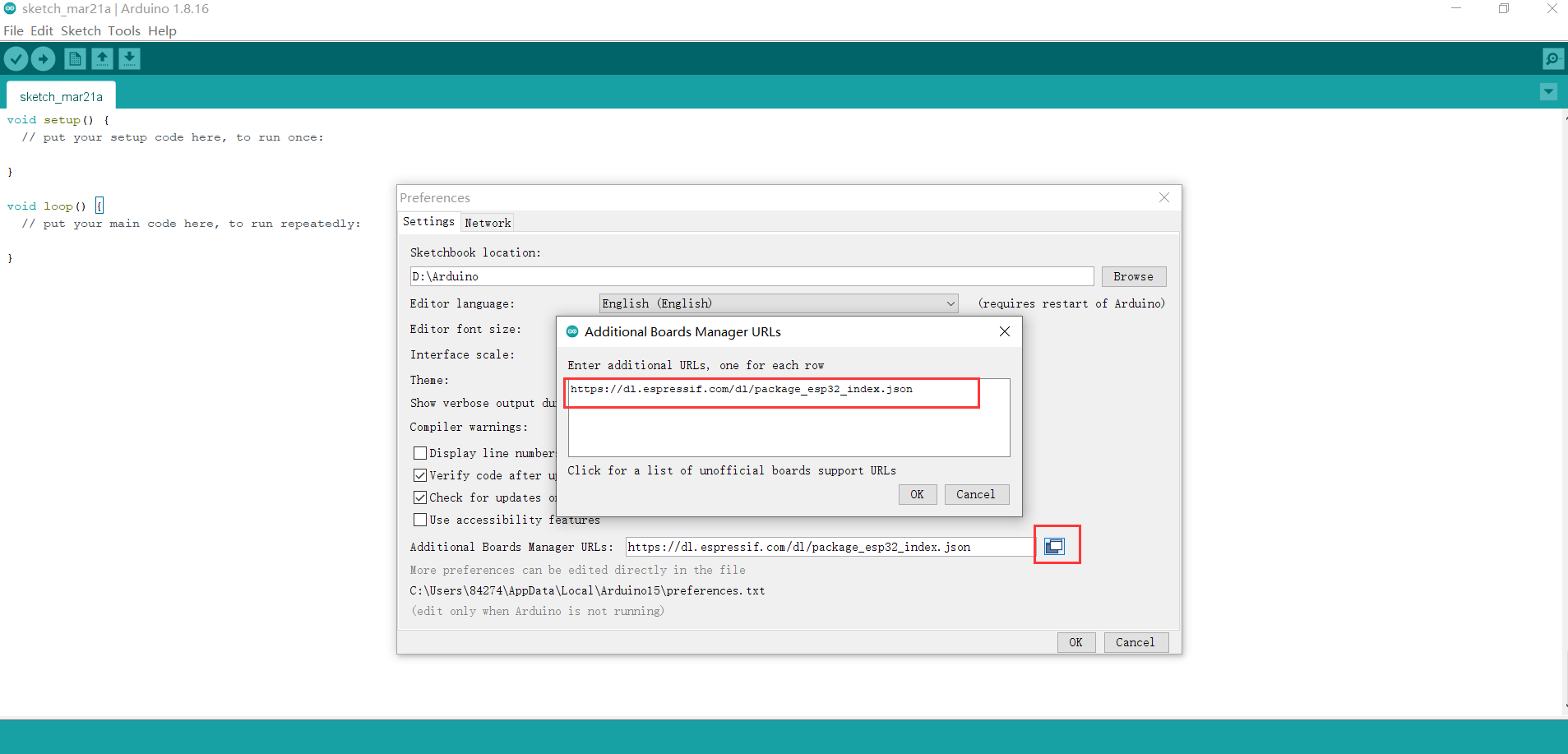
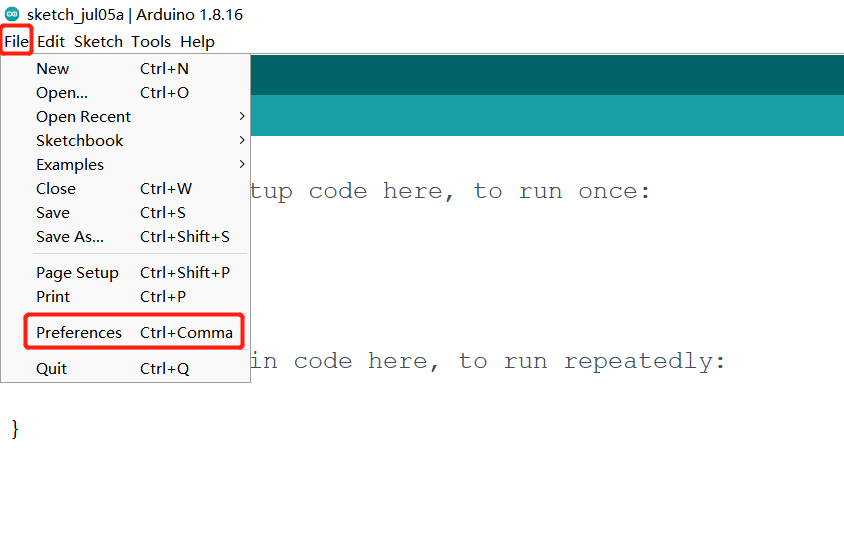
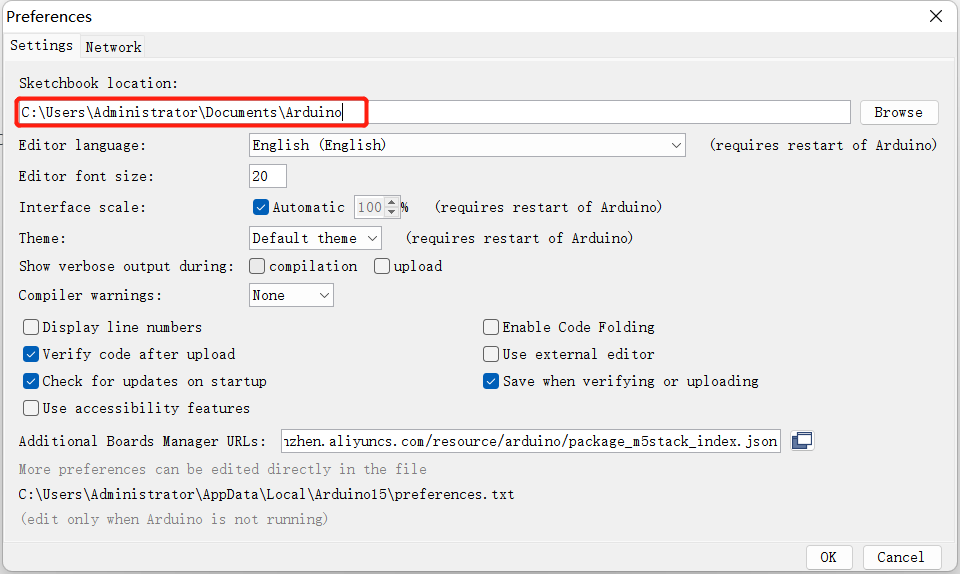
打开Arduino IDE 然后选择 File --> Preferences --> Settings 去添加下方的url到additional board manager:
https://m5stack.oss-cn-shenzhen.aliyuncs.com/resource/arduino/package_m5stack_index.json
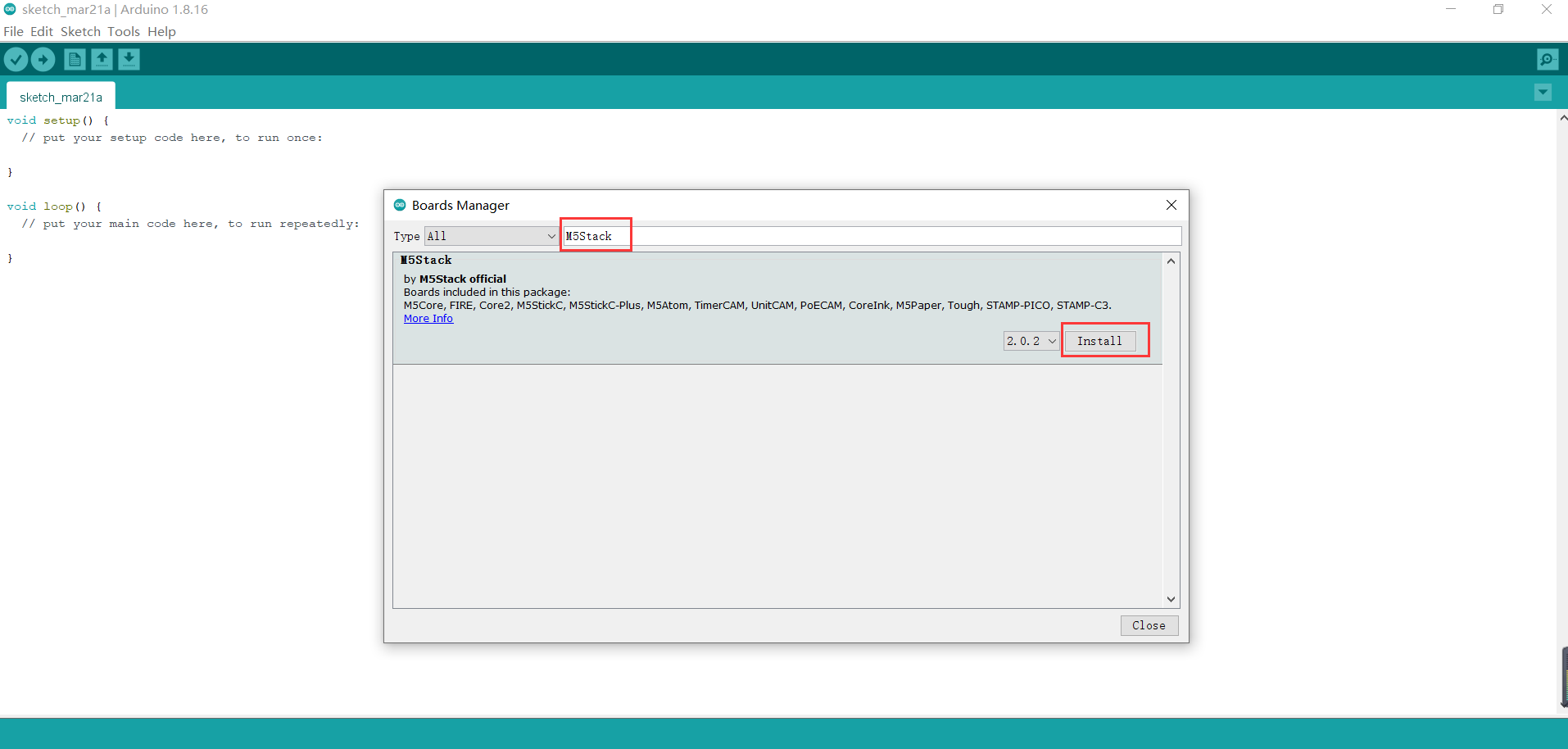
- 添加后,点击 Tools --> Board --> Boards Manager, 在新的弹出对话框中, 输入和搜索 M5Stack , 单击“安装” (如果搜索失败,可以尝试重新启动 Arduino 程序), 如下所示:
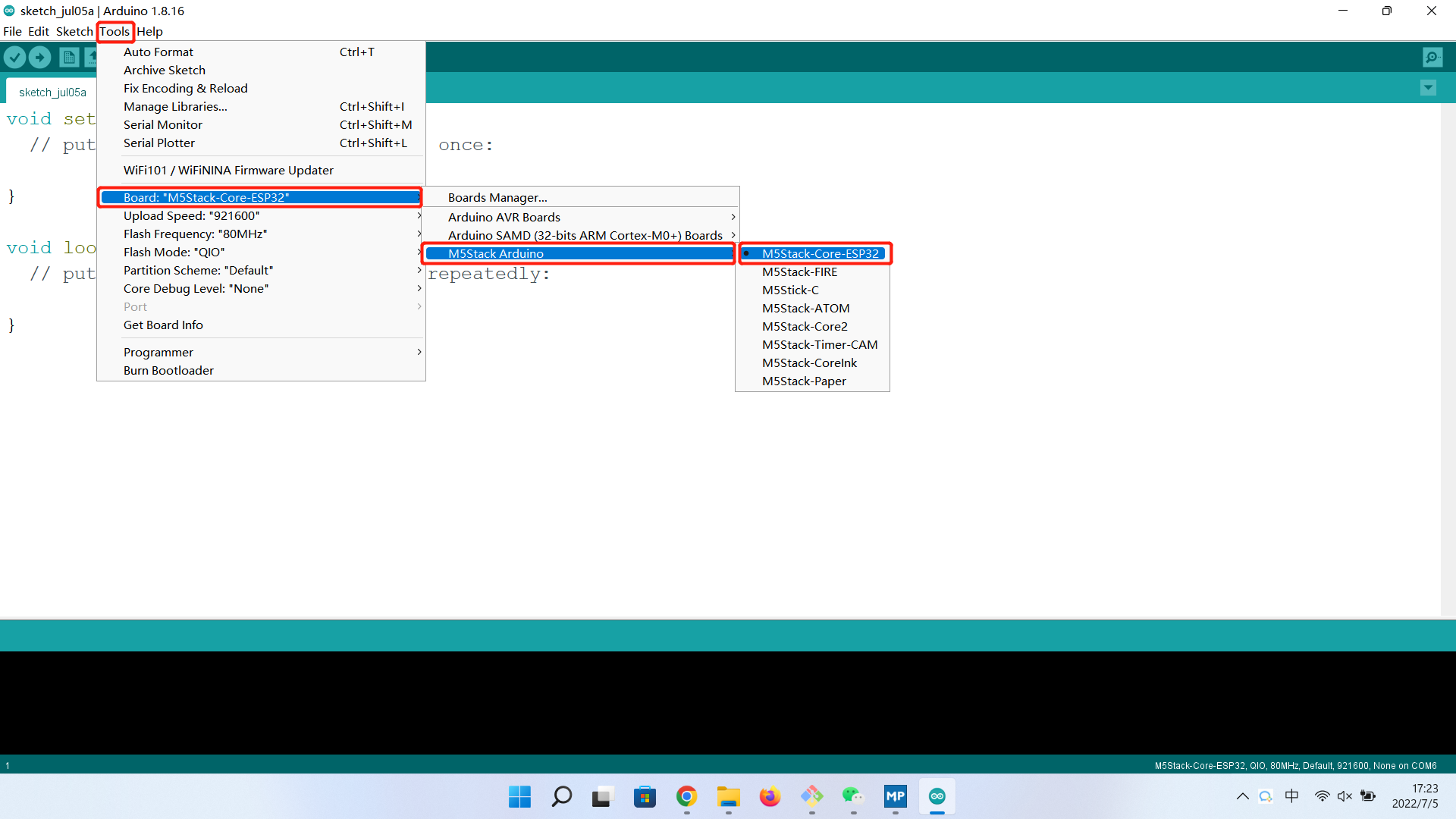
- 添加后,点击 Tools --> Board, 检查是否成功,如下图所示:
4 添加相关库
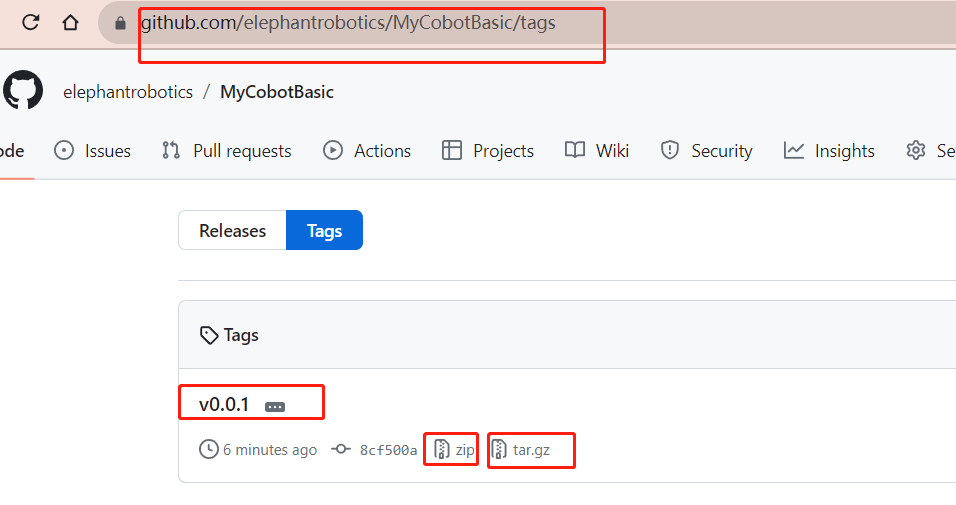
注意: 请下载最新的库,第一版为v0.0.1。
- 点击下载相关依赖库
- MycobotBasic(Mycobot280-Arduino机型导入后可以参考Arduino简单使用章节进行使用)。具体请看下图,.zip适用于Windows系统,.tar.gz适用于Linux系统:
- MycobotBasic(Mycobot280-Arduino机型导入后可以参考Arduino简单使用章节进行使用)。具体请看下图,.zip适用于Windows系统,.tar.gz适用于Linux系统:
库安装说明
首先通过单击File --> Preferences 检查Arduino项目文件夹的位置 (您可以将路径复制到硬盘以查找库文件夹)
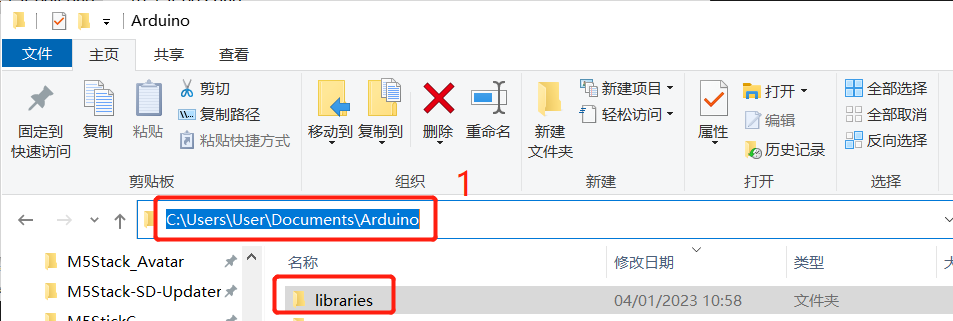
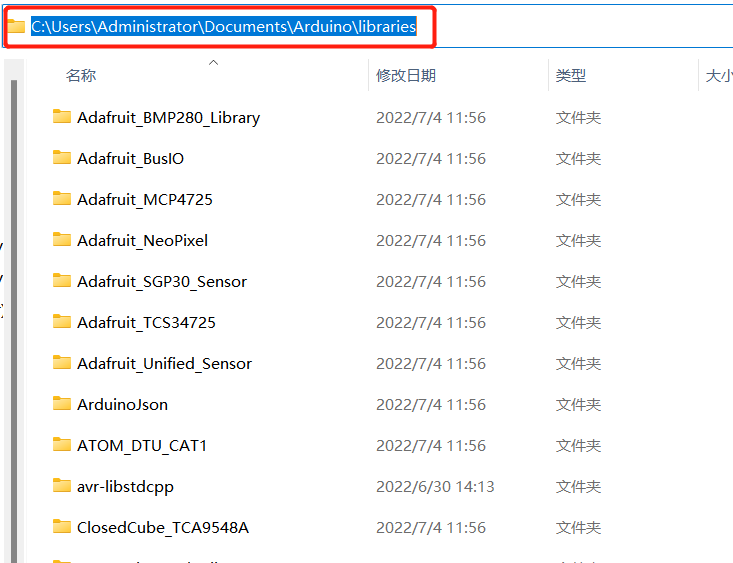
1 将路径复制到此处,然后按enter键查找库文件夹
将其解压缩到库目录中的相应文件夹中。 如果您正在使用Arduino, 不要覆盖它,只需添加到现有的库。
恭喜您,您已经构建了一个Arduino相关的开发环境。
注意: Arduino环境配置和案例编译可以在我们的b站视频中看到 ( https://www.bilibili.com/video/BV1Vi4y1c7DQ/ ) .
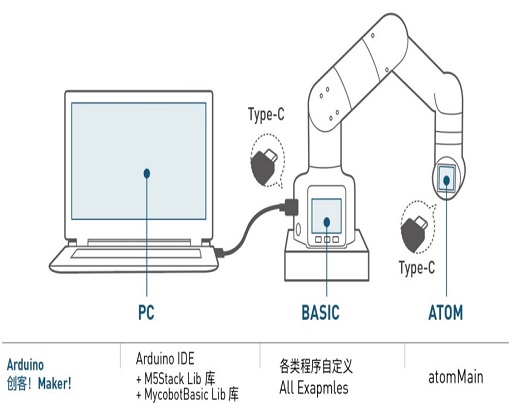
2 基于 Arduino 开发使用
Arduino 是一款简单易用、便于上手的开源电子原型平台,包含硬件部分(各种符合 Arduino 规范的开发板)和软件部分( Arduino IDE 和相关的开发包)。 硬件部分(或称开发板)由微控制器(MCU)、闪存(Flash)以及一组通用输入/输出接口(GPIO)等构成,你可以将它理解为是一块微型电脑主板。 软件部分则主要由PC端的 Arduino IDE 以及相关的板级支持包(BSP)和丰富的第三方函数库组成。使用者可以借由 Arduino IDE 轻松地下载你所持有的开发板相关的BSP和需要的函数库,用于编写你的程序。我们有一个开源库MyCobotBasic,它是我们公司开发的一款开源机器人控制库,需要使用我们公司开发的机器人方可使用。使用该库,您可以通过蓝牙、WiFi、串口等方式控制我们的机器人,同时支持外接传感器、IIC通信、LED灯等功能。您可以根据自己的需求DIY不同的应用场景,也可以参考我们提供的MiniRobot示例代码或者角度、坐标、夹爪等控制案例。MiniRobot示例代码中包含蓝牙、WiFi、拖动示教、距离传感器等控制相关的内容。用户安装Arduino环境后,可以直接查看 Arduino简单使用和相关接口。详情请查阅Arduino开发指引章节。
3 基于Python 开发使用
我们的机器人支持Python,Python API库的开发也越来越完善。 可以通过Python控制机器人的关节角度、坐标、夹持器等方面。 参考python开发相关章节获取更多信息。

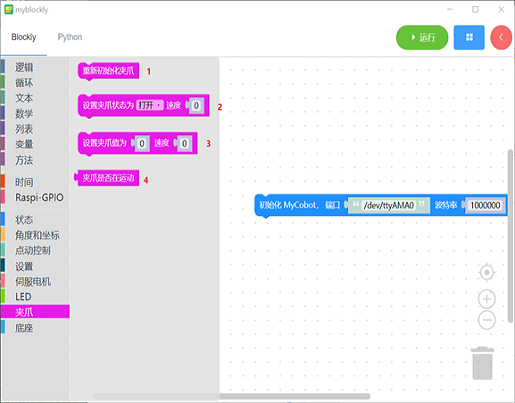
4 基于Blockly 开发使用
myBlockly是一款全可视化的模块化编程软件,属于图形化编程语言,详情可查阅基于myBlockly开发相关章节。
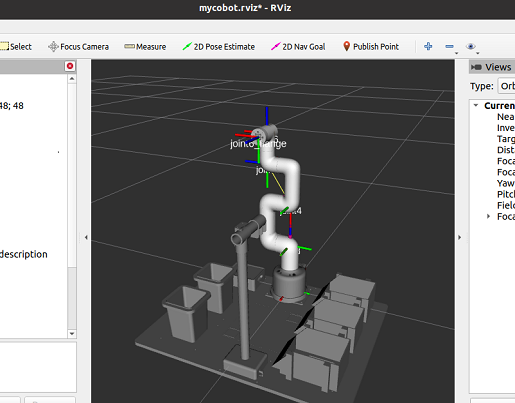
5 基于ROS开发
ROS 是开源的,是用于机器人控制的一种后操作系统,或者说次级操作系统。通过ROS,我们能够在虚拟环境中实现对机械臂的仿真控制。我们将通过 rviz 平台实现对机械臂的可视化,并使用多种方式对我们的机械臂进行操作;通过moveit 平台进行机械臂行动路径的规划和执行,达到自由控制机械臂的效果。
Ros的出现解决了机器人各个部件的通信问题。 后来,越来越多的机器人算法被集成到ROS中。 ROS2继承了ROS,比ROS更强大更好。
与仅支持Linux系统的ROS相比,ROS2还支持windows、mac,甚至RTOS平台。关于ROS和ROS2开发的更详细内容请查看相关章节。