arduino API
机器人整体运行状态 Overall Status
1.1 powerOn();
功能:机器人上电,上电后才可以控制机器人
返回值:无
1.2 powerOff();
功能:机器人掉电
返回值:无
1.3 isPoweredOn();
功能:atom 状态查询,返回 atom 连接状态
返回值:打开 TRUE、关闭 FALSE
1.4 getAtomVersion();
功能:获取Atom固件版本
返回值:int类型的数值,数据需要/10,比如读取到版本号为12,实际需要除10,最终版本号为1.2
1.5 setFreeMoveMode(bool mode);
- 功能:设置自由移动模式,开启自由移动模式后,末端led为黄色,长按末端atom,可以手动移动机器人
- 参数说明:
mode:模式,0/1,0--关闭自由移动,1--开启自由移动
返回值: 无
输入程序控制模式 MDI Mode and Robot Control (Manual Data Input)
2.1 getAngles();
功能:读取所有关节角度,使用时应定义一个 Angles angles,来接收读取到的角度,Angles 是库函数内置的变量或函数定义,可以定义一个内存为 6 的储存空间 angles,用来储存角度变量,使用的方式与数组相同。
返回值:Angles 类型的数组
2.2 writeAngle(int joint, float value, int speed);
功能:发送单关节角度
参数说明: 关节序号 = joint,取值范围 1-6; 指定角度值 = value,取值范围约-170°- +170°; 指定速度 = speed, 取值范围 1-100;
返回值:无
2.3 writeAngles(Angles angles, int speed);
功能:关节角度同步执行,同时发送六个关节的角度给执行器 Angles 为库函数声明的定义类型,指定 angles 是容量大小为 6 个数据的容器,可理解为数组,赋值时可使用 for 循环赋值,也可单独赋值。
参数说明: Angles[0] = 具体角度,Angles[2] = 具体角度,以此类推取值范围 0-90(范围为定义,取值范围应和 writeAngle 相同) 单位:度 符号:° 运动速度 = speed,取值范围 1-100 单位 %
返回值:无
2.4 getCoords();
功能:读取当前机械臂末端的 x, y, z, rx, ry, rz,使用时应定义一个 Coords tempcoords,来接收读取到的角度,Coords 是库函数内置的变量或函数定义,可以定义一个内存为 6 的储存空间 tempcoords,用来储存角度变量,使用的方式与数组相同。
返回值:Coords 类型下的一个数组,需要定义好 Coords 类型的变量
2.5 writeCoord(Axis axis, float value, int speed);
功能:发送单独坐标参数 X/ Y/ Z/ RX/ RY/ RZ 的具体数值,末端会在单独方向上移动,
参数说明: 移动的路径坐标值 = value 取值范围 -300-300(axis=Axis::X,aixs=Axis::Y 和 axis=Axis::Z 为位置坐标分别为 X,Y,Z,单位 mm,位置坐标取值范围不统一,axis=Axis::RX, aixs=Axis::RY 和 axis=Axis::RZ 分别为 RX,RY,RZ 取值范围为 -180°-180° ,超出取值范围会返回 inverse kinematics no solution 提示) 指定速度 =speed 取值范围 1-100 单位 %
返回值:无
2.6 writeCoords(Coords coords, int speed);
功能:发送指定的坐标参数,参数的类型应是 Coords,需要声明一个 Coords 类型的变量,此变量的使用方法与数组相同
参数说明: coords[0] = X, coords[1] = Y, coords[2] = Z, X,Y,Z 取值范围 -300.00-300.00(取值范围未定义,超出范围会返回 inverse kinematics no solution 提示) 单位 mm coords[3] = RX, coords[4] = RY, coords[5] = RZ, RX,RY,RZ 取值范围 -180-180 指定速度 =speed 取值范围 1-100 单位 %
返回值:无
2.7 checkRunning();
功能:检查设备是否在运动
返回值:运动中回复 TRUE,否则回复 FALSE
2.8 setEncoder(int joint, int encoder);
功能:设定单一关节转动至指定电位值
参数说明:关节序号 = joint 取值范围 1-7 (7号关节一般为夹爪,夹爪电位值取值范围:1325-2048);舵机电位值 = encoder 取值范围 0-4096(该范围应与每个关节的范围正相关)
返回值:无
2.9 getEncoder(int joint);
功能:获取指定关节电位值
参数说明:舵机序号 = joint 取值范围 1-7
返回值:int 类型,参考取值范围 0-4096
2.10 setEncoders(Angles angleEncoders, int speed);
功能:设定机械臂六个关节同步执行至指定位置
参数说明:需要定义一个 Angles 类型的一个变量 angleEncoders,,angleEncoders 的使用方法等同于数组,对数组 angleEncoders 赋值,取值范围 0-4096(该范围应与每个关节的范围正相关),数组的长度范围是6,指定速度 =speed,取值范围 1-100 单位 %
返回值:无
2.11 getEncoders();
功能:获取所有关节电位值
返回值:Angles 类型的数组,参考取值范围 0-4096
2.12 getServoSpeeds();
功能:获取所有舵机速度
返回值:Angles 类型的数组,不运动时速度为0
微动控制模式 JOG Mode
3.1 jogAngle(int joint, int direction, int speed);
功能:控制设备单一关节向一个方向运动
参数说明: 关节舵机序号 = joint 取值范围 1-6 关节运动方向 = Direction 取值范围 -1/1 指定速度 = speed,取值范围 1-100 单位%
返回值:无
3.2 jogCoord(Axis axis, int direction, int speed);
功能:控制设备在笛卡尔空间中向一个方向运动
参数说明: 设备方向选择 = axis 取值 X,Y,Z,RX,RY,RZ 关节运动方向 = Direction 取值 -1/1 指定速度 = speed,取值范围 1-100 单位 %
返回值:无
3.3 jogStop();
功能:停止已经开始的指定方向运动
返回值:无
3.4 ProgramPause();
功能:程序暂停运行
返回值: 无
3.5 ProgramResume();
功能:程序恢复运行
返回值: 无
3.6 TaskStop();
功能:程序停止运行
返回值: 无
运行辅助信息 Running Status and Settings
4.1 getSpeed();
功能:读取设备的当前运行速度
返回值:int 类型,取值范围 1-100 ,单位 %
4.2 setSpeed(int percentage);
功能:设置设备运行速度
参数说明:percentage 取值范围 1-100 ,单位 %
4.3 getJointMin(int joint);
功能:读取关节最小限制角度
参数说明:关节舵机序号 = joint,取值范围 1-6
返回值:float 类型的数值
4.4 getJointMax(int joint);
功能:读取关节最大限制角度
参数说明:关节舵机序号 = joint,取值范围 1-6
返回值:float 类型的数值
4.5 setMovementType(MovementType movement_type);
功能:设置移动方式
参数说明:移动方式分别为以非线性路径移动(movej)和以线性路径移动(movel)
返回值:无
4.6 getMovementType();
功能:读取移动方式
返回值:非线性方式返回 0 ;线性方式返回 1
关节电机设置 Joint Servo Control
5.1 isServoEnabled(int joint);
功能:查看单关节连接状态
参数说明:关节舵机序号 = joint,取值范围 1-6
返回值:连接状态,0/1,1--已连接,0--未连接
5.2 isAllServoEnabled();
功能:检测所有关节连接状态
返回值:连接状态,0/1,1--已连接,0--未连接
5.3 getServoData(int joint, byte data_id);
功能:读取舵机系统参数
参数说明: 关节舵机序号 = joint,取值范围 1-6 ; 数据地址 = data_id,取值范围请参考下图中地址
返回值:下图 1.1 中取值范围
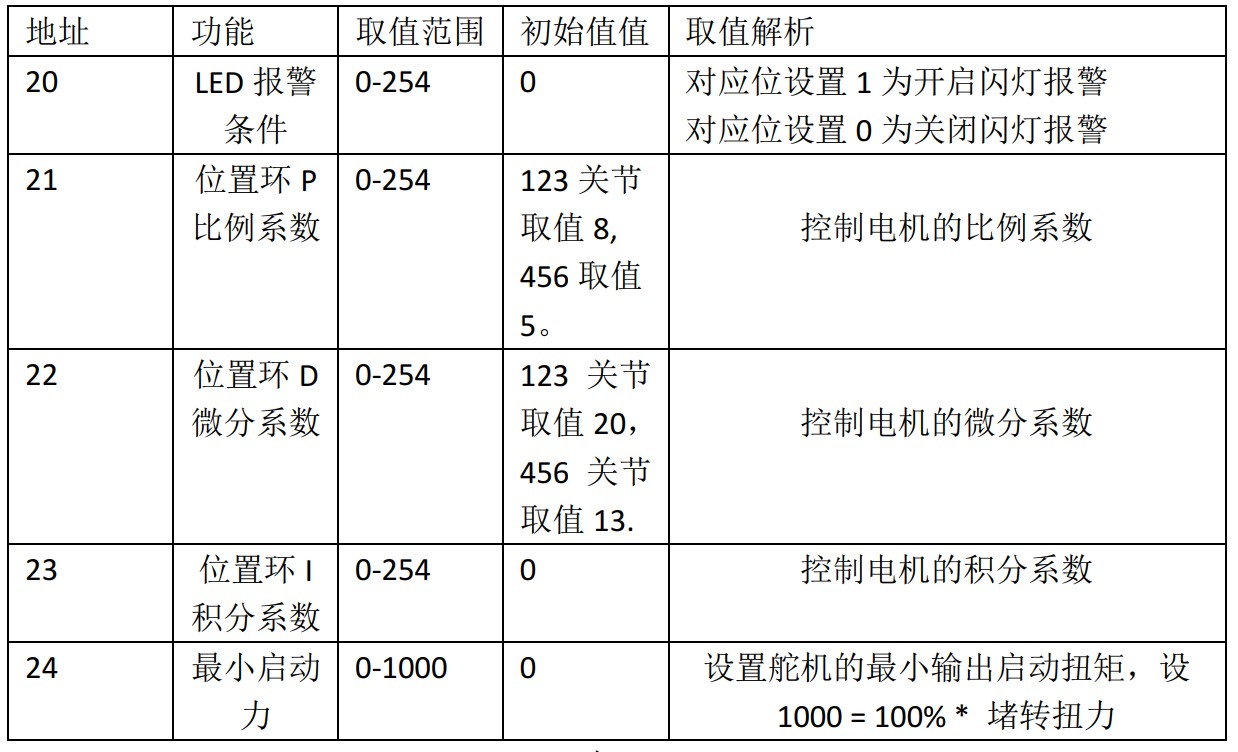
5.4 setServoData(int joint, byte data_id, byte data);
功能:设置舵机系统参数
参数说明:
关节舵机序号 = joint,取值范围 1-6
数据地址 = data_id,取值范围请参考上图中地址
数据 = 上图中的取值范围返回值:无
5.5 setServoCalibration(int joint);
功能:关节零位校准,对应电位值为 2048
参数说明:关节舵机序号 = joint,取值范围 1-6
5.6 releaseServo(byte servo_no);
功能:放松/使机器人某一关节处于掉使能状态
参数说明:servo_no为 1-6
返回值:无
5.7 focusServo(byte servo_no);
功能:使机器人某一关节处于使能状态
参数说明:servo_no为 1-6
返回值:无
5.8 getServoVoltages();
功能:获取所有舵机电压
返回值: Angles 类型的数组,参考取值范围 8.4-12.0
5.9 getServoStatus();
功能:获取所有舵机状态
返回值: 0表示一切状态正常;1表示电压过压/欠压;2表示磁编码状态异常;4表示温度过热;8表示电流过流;32表示负载过载;当出现的数字不等于上述异常数字时,例如:3则表示电压过压/欠压和磁编码状态异常,7表示电压过压/欠压、磁编码状态异常和温度过热
5.10 getServoTemps();
功能:获取所有舵机温度
返回值: Angles 类型的数组,参考取值范围 0-255
Atom 末端IO控制 Atom IO Control
6.1 setPinMode(byte pin_no, byte pin_mode);
功能:设置 atom 指定引脚的状态模式
参数说明: 引脚序号 =
pin_no取值范围:19、22、23、26、32、33 输出模式 =pin_mode取值范围:0、1返回值:无
6.2 setLEDRGB(byte r, byte g, byte b);
功能:设定 atom 屏幕的 RGB 灯的颜色:
参数说明: 红色光对应参数值 = r,取值范围 0x00-0xFF; 绿色光对应参数值 = g,取值范围 0x00-0xFF; 蓝色光对应参数值 = b,取值范围 0x00-0xFF;
返回值:无
6.3 setGripperState(byte mode, int sp);
功能:设置夹爪开合状态
参数说明:
- mode,夹爪开合模式,范围0/1, 0--夹爪打开到最大,1--夹爪闭合到最小
- sp,夹爪开合速度,范围1-100
6.4 setGripperValue(int data, int sp);
功能:设置夹爪开合角度
参数说明:
- data,夹爪开合角度,范围0-100,0--闭合到最小角度,100--打开到最大角度
sp,夹爪开合速度,范围1-100
返回值:无
6.5 setGripperIni();
功能:设置夹爪零点
返回值:无
6.6 getGripperValue();
功能:获取夹爪当前角度
返回值:返回当前的夹爪角度,范围 0-100
6.7 isGripperMoving();
功能:检测夹爪是否在运动
返回值:0 未运动,1 在运动
6.8 void setEletricGripper(bool mode);
注意:此接口仅MyCobot320机器人可用
功能:控制电动夹爪开合
参数说明:
mode:模式,0/1,0--夹爪打开到最大,1--夹爪闭合到最小
返回值:无
6.9 void InitEletricGripper();
注意:此接口仅MyCobot320机器人可用
功能:初始化电动夹爪开合,每次插上电动夹爪后,需要先初始化,才能控制,初始化成功后夹爪会开合一次
返回值:无
6.10 void setGripperMode(bool mode);
注意:此接口仅MyCobot320机器人可用
功能:设置自适应夹爪控制模式
参数说明:
mode:模式,0/1,0--485通信控制,1--io控制(io模式下,只能开或者关,不能设置角度,引脚23、33,开或者关时,两个引脚皆需要设置不同状态,必须是一高一低)
返回值:无
6.11 bool getGripperMode();
注意:此接口仅MyCobot320机器人可用
功能:设置自适应夹爪控制模式
返回值:自适应夹爪控制模式,0/1,0--485通信控制,1--io控制
6.12 setDigitalOutput(byte pin_no, byte pin_state);
功能:设置IO引脚的工作状态
参数说明:0 input; 1 output; 2
pull_up_input返回值:无
6.13 getDitialInput(byte pin_no);
功能:读取输入
参数说明:引脚序号 = pin_no 取值范围:19、22、23、26、32、33
返回值:无
6.14 setPWMOutput(byte pin_no, int freq, byte pin_write);
功能:设置ATOM末端IO输出指定占空比的PWM信号
参数说明:
- pin_no:IO序号
- freq:时钟频率
pin_write:占空比 0-256 ; 128表示50%
返回值:无
坐标控制模式
7.1 setToolReference(Coords coords);
功能:设置工具坐标系
参数说明: X,Y,Z 取值范围 -300.00-300.00(取值范围未定义,超出范围会返回 inverse kinematics no solution 提示) 单位 mm RX,RY,RZ 取值范围 -180.00-180.00
返回值: 无
7.2 setWorldReference(Coords coords);
功能:设置世界坐标系
参数说明: X,Y,Z 取值范围 -300.00-300.00(取值范围未定义,超出范围会返回 inverse kinematics no solution 提示) 单位 mm RX,RY,RZ 取值范围 -180.00-180.00
返回值: 无
7.3 getToolReference();
功能:获取工具坐标系
返回值: X,Y,Z 取值范围 -300.00-300.00(取值范围未定义,超出范围会返回 inverse kinematics no solution 提示) 单位 mm RX,RY,RZ 取值范围 -180.00-180.00
7.4 getWorldReference();
功能:获取世界坐标系
返回值: X,Y,Z 取值范围 -300.00-300.00(取值范围未定义,超出范围会返回 inverse kinematics no solution 提示) 单位 mm RX,RY,RZ 取值范围 -180.00-180.00
7.5 setReferenceFrame(RFType rftype);
功能:设置法兰坐标系
参数说明:
RFType::BASE 为将机器人基座作为基坐标,RFType::WORLD 为将世界坐标系作为基坐标。返回值: 无
7.6 getReferenceFrame();
功能:获取法兰坐标系
返回值: X,Y,Z 取值范围 -300.00-300.00(取值范围未定义,超出范围会返回 inverse kinematics no solution 提示) 单位 mm RX,RY,RZ 取值范围 -180.00-180.00
7.7 setEndType(EndType end_type);
功能:设置末端坐标系
参数说明: EndType::FLANGE 为将末端设置为法兰,EndType::TOOL 为将末端设置为工具末端。
返回值: 无
7.8 getEndType();
功能:获取末端坐标系
返回值: X,Y,Z 取值范围 -300.00-300.00(取值范围未定义,超出范围会返回 inverse kinematics no solution 提示) 单位 mm RX,RY,RZ 取值范围 -180.00-180.00