Computer control
The timeliness of computer control is crucial for microcontroller robotic arms. For microcontroller robotic arms, we usually send control instructions to the Basic of the base, forward them through computer control, and the end effector will parse the instructions and then perform the target action.
This function is currently mainly used by customers to develop robotic arms in different environments.
Depending on the device type, the operation method is also different, the steps are as follows:
Atom burns the latest version of atomMain
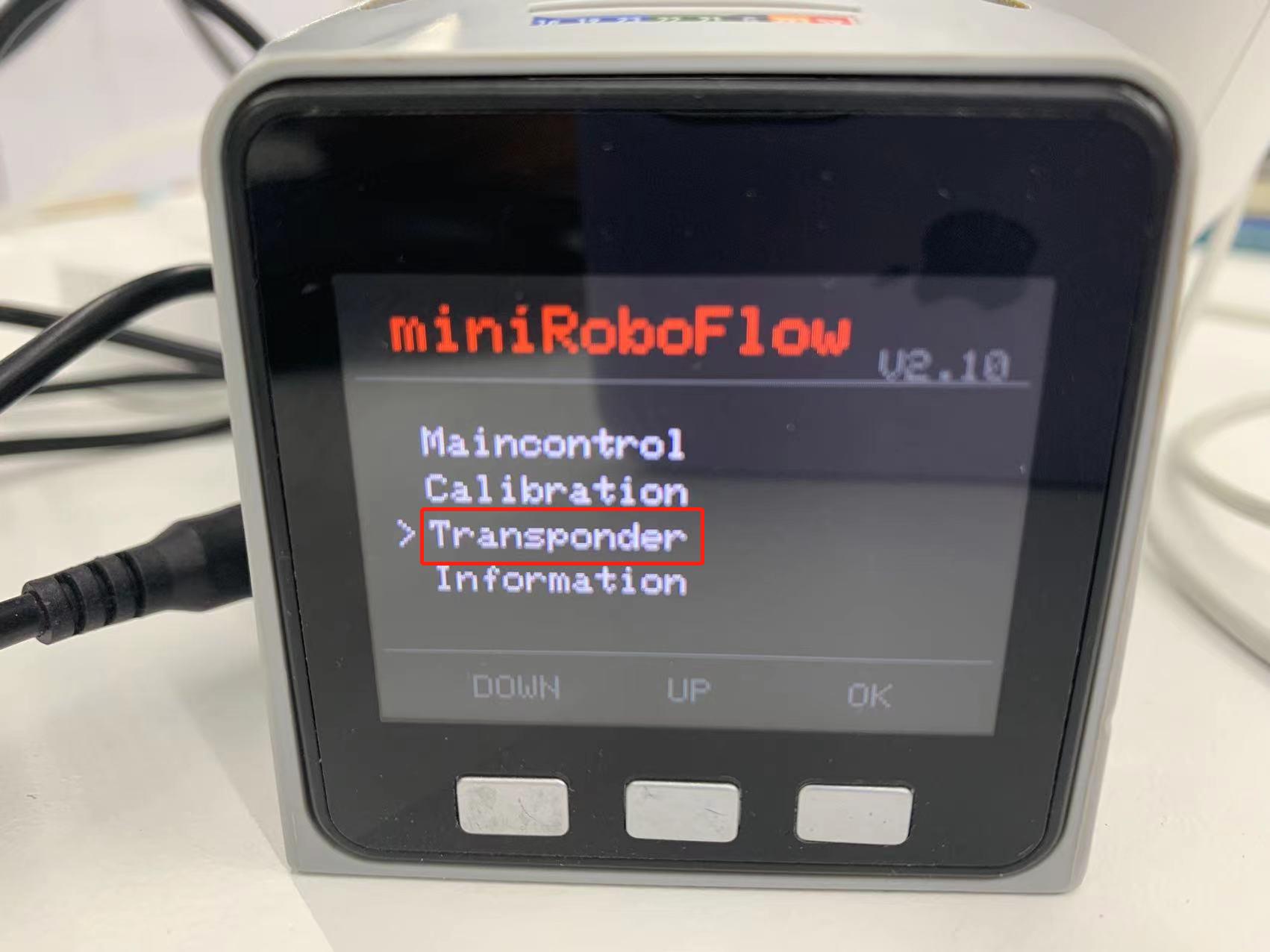
M5Stack-basic burns minirobot, selects Transponder function, microprocessor devices do not need to burn M5Stack-basic
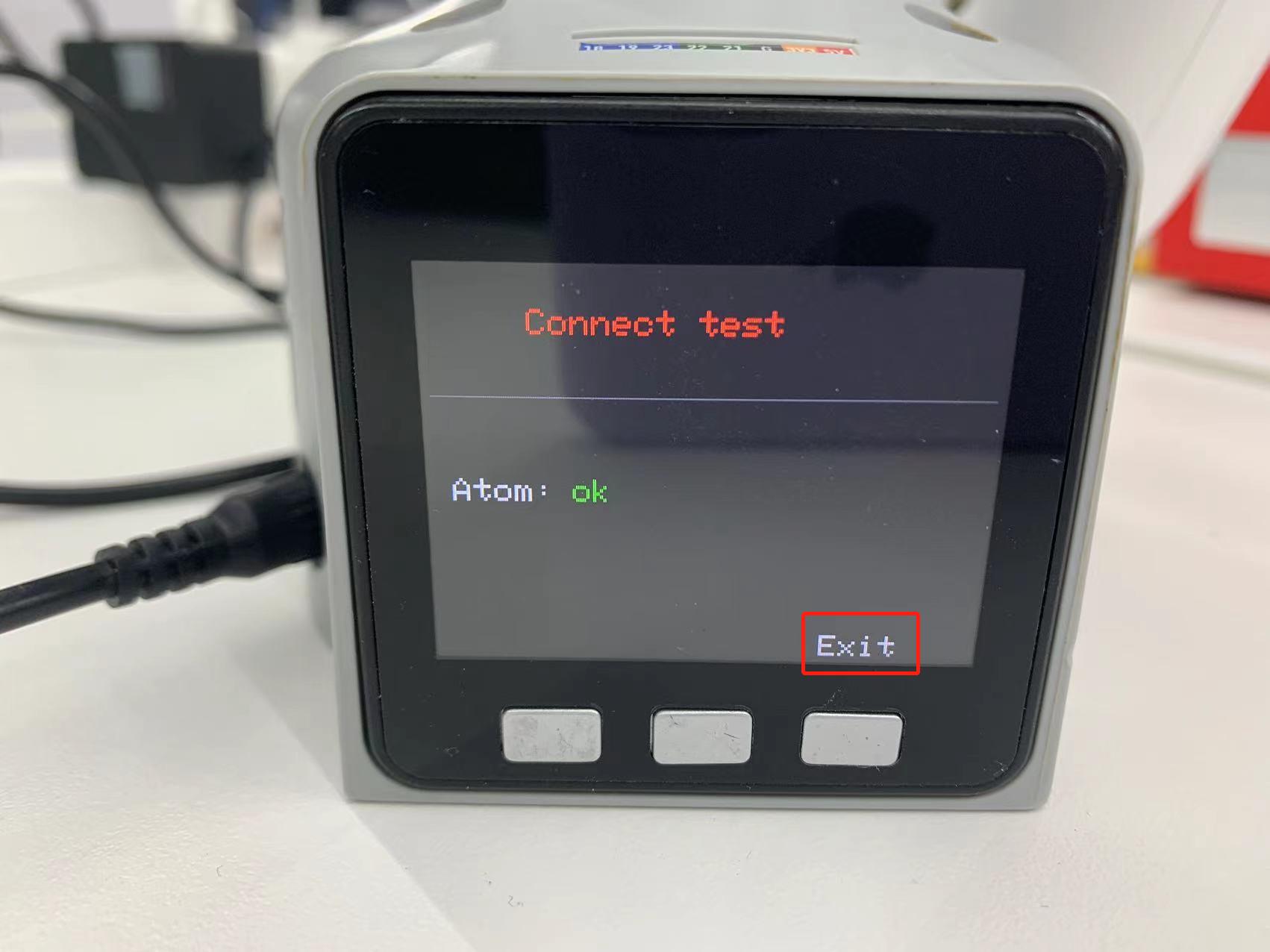
Press the detection key to detect whether Basic and the end effector Atom are communicating normally
Press the exit button to exit this function
In this section, we can detect in real time whether Basic and the end effector Atom are communicating normally.
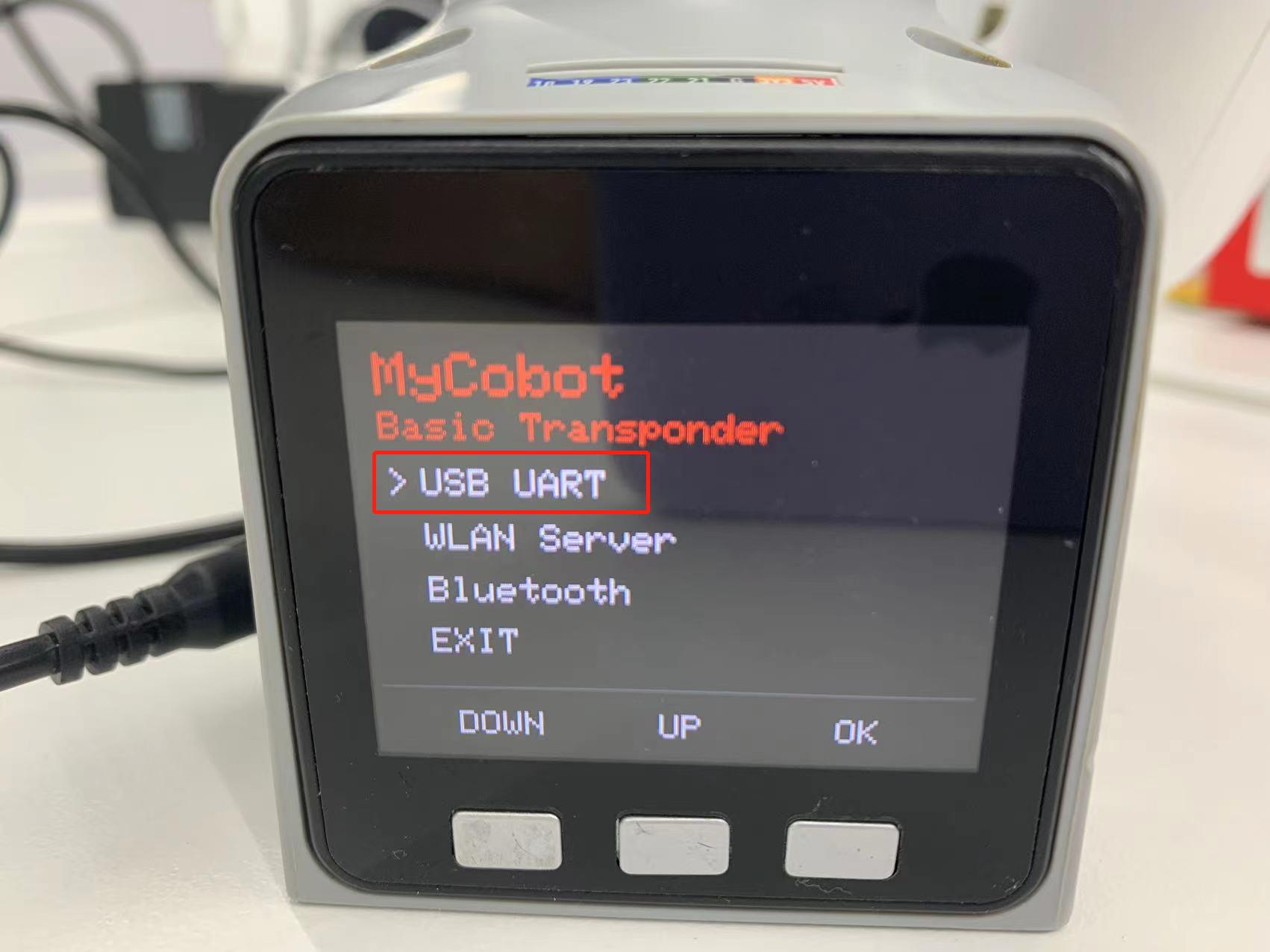
Realize communication forwarding
Applicable devices
- myCobot 280 M5
- myCobot 320 M5
- myPalletizer 260 M5
- mechArm 270 M5
Operation steps
Step 1: Atom burns the latest version of atomMain.
Step 2: M5Stack-basic burns minirobot, selects the Transponder function.
Step 3: Check the connection of Atom (ok means the connection is normal, otherwise it will display no).
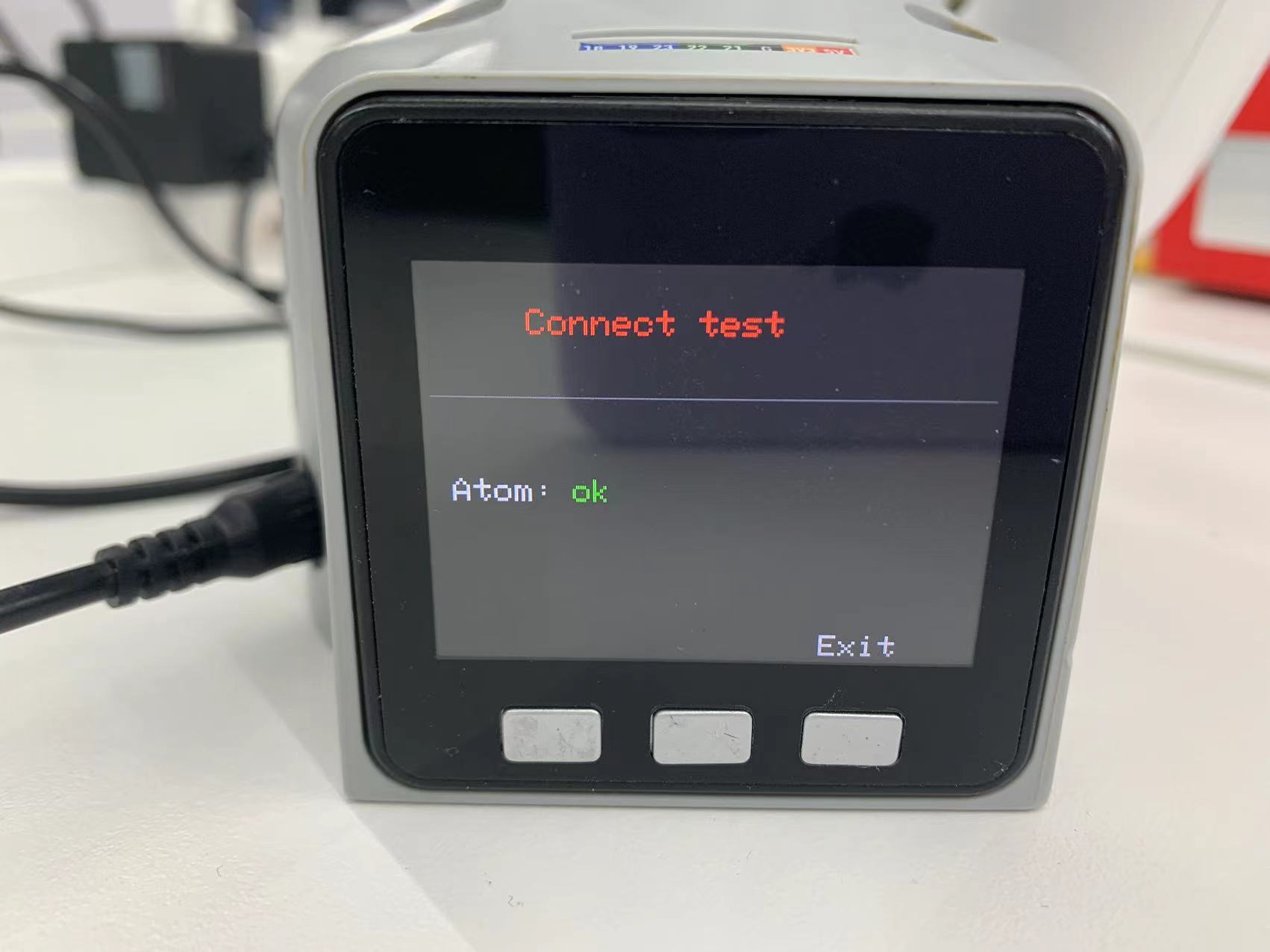
Step 4: Click Exit to exit this function.