Use of grippers
Preparation before starting
M5Stack series: Make sure the robot is connected to the computer (for details, please refer to myBlockly chapter
Other series: Make sure the machine is normal
Grippers include adaptive grippers, electric grippers, and pneumatic grippers. Different grippers are compatible with different robot arm models. For details, please refer to Accessories. Here, we take the adaptive gripper and myPalletizer 260 M5Stack robot arm as an example to explain how to use myBlockly to control the gripper.
Learning content in this chapter
How to use myBlockly to control the adaptive gripper connected to the myPalletizer 260 M5Stack robot
API display
- Method module 1:
Reinitialize the gripper

Applicable scope: myCobot 280 series, myPalletizer 260 series, mechArm 270 series
Purpose: Set the initial position of the gripper
Method module 2:
Set the gripper state

Applicable scope: myCobot 280 series, myPalletizer 260 series, mechArm 270 series
Parameter introduction:
This module has two parameters that can be adjusted:
Gripper state parameter: 1 indicates the gripper is closed, 0 indicates the gripper is open
Speed parameter: indicates the speed of rotation, the value range is 0~100
Purpose: Make the gripper enter the specified state (open or closed) at the specified speed
Method module 3:
Set the value of the gripper

Applicable scope: myCobot 280 series, myPalletizer 260 series, mechArm 270 series
Parameter introduction:
This module has two parameters that can be adjusted:
Gripper value parameter: indicates the position to be reached by the gripper, with a value range of 0~256.
Speed parameter: indicates the speed of rotation, with a value range of 0~100.
Purpose: Make the gripper rotate to the specified position at a specified speed.
Method module 4:
Is the gripper moving

Applicable scope: myCobot 280 series, myPalletizer 260 series, mechArm 270 series
Purpose: Determine whether the gripper is running
Simple demonstration
- The graphic code is as follows:
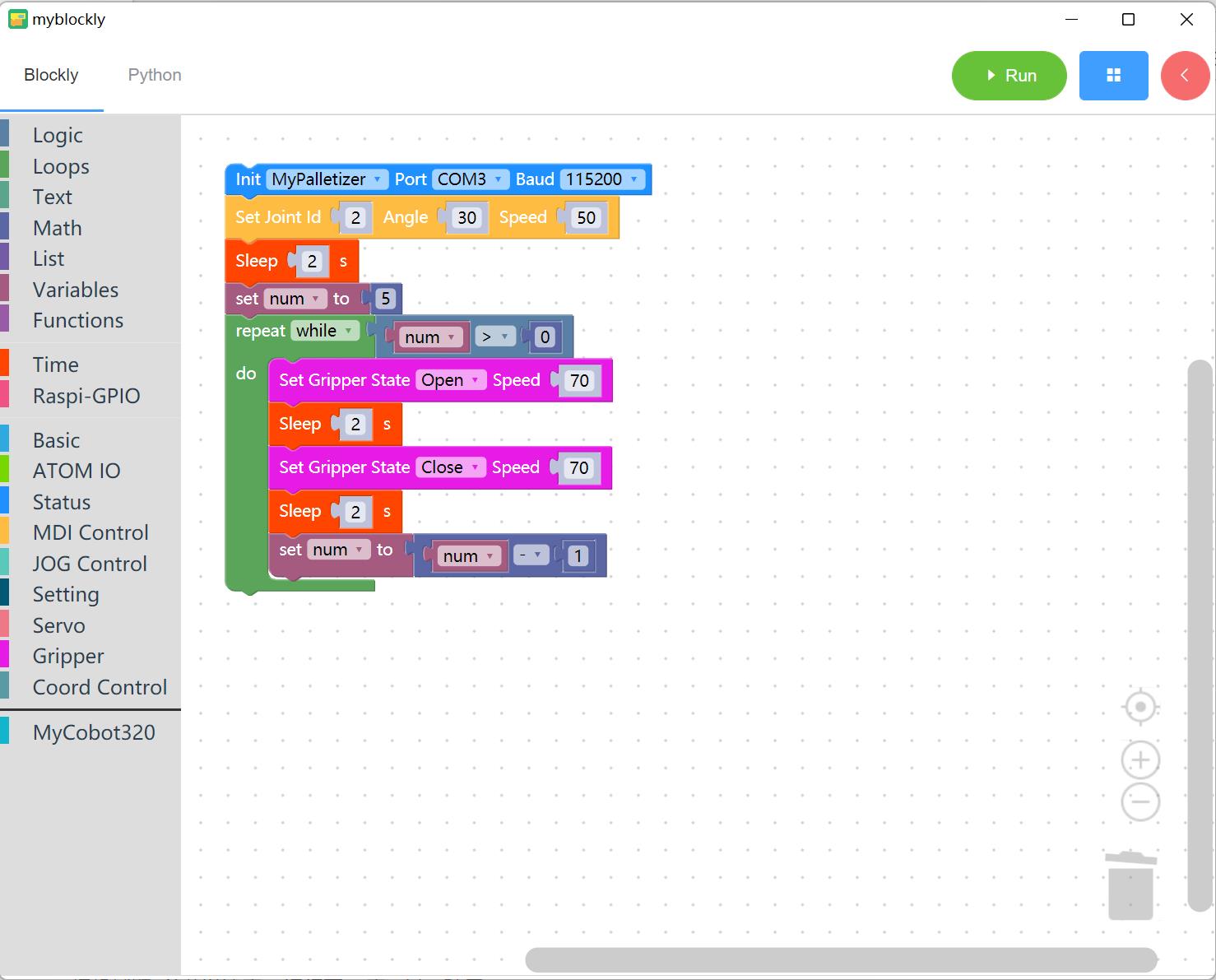
- Implementation content:
The robot arm 2 joint runs at a speed of 50 to 30 degrees. After one second,
the gripper opens at a speed of 70. After one second,
the gripper closes at a speed of 70.
After the gripper opens and closes 5 times, the program ends.