Gripper control
Gripper installation:
The adaptive gripper inserts the gripper into the pins on the atom, see the following figure for details:

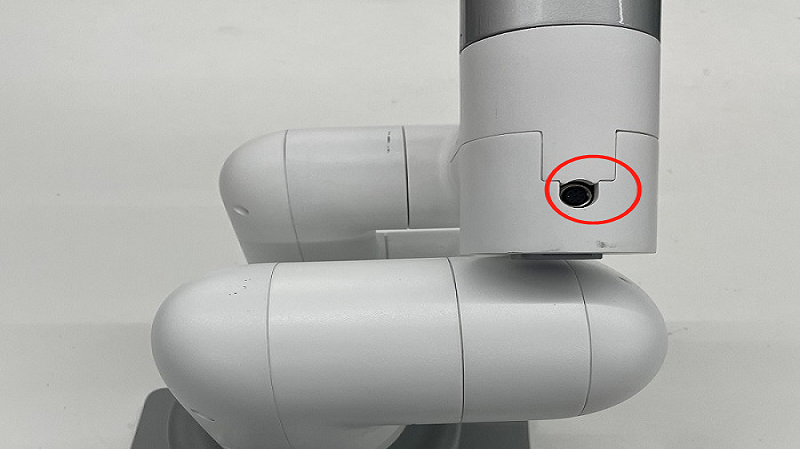
The electric gripper is plugged into the 485 interface on the top, see the following figure for details:
Note: myCobot280 and myPalletizer 260 do not have electric grippers, only myCobot320 has electric grippers.
Adaptive gripper control
Supported devices: myCobot280, 320 && myPalletizer 260
1.1 setGripperValue(byte angle, byte speed)
Return value: None
Parameter description: Parameter 1: Gripper opening and closing angle (0-100, 0--closed, 100-open maximum angle), Parameter 2: Gripper opening and closing speed (0-100)
Case:
mc.setGripperValue(0, 10);
Thread.Sleep(3000);
mc.setGripperValue(50, 100);
Thread.Sleep(3000);
1.2 getGripperValue()
Return value: int type, returns the gripper angle (0--closed, 100-open maximum angle)
Parameter description: None
Case:
Console.WriteLine(mc.getGripperValue());
Electric Gripper Control
Supported devices: myCobot320
2.1 setEletricGripper(int state)
Return value: None
Parameter description: Gripper switch state (0--off, 1--on)
Example:
mc.setEletricGripper(0);
Complete use case
using System;
using System.Threading;
namespace Mycobot.csharp
{
class Test
{
static void Main(string[] args)
{
MyCobot mc = new MyCobot("COM57");//Raspberry Pi robotic arm serial port name: /dev/ttyAMA0
mc.Open();
Thread.Sleep(5000);//After Windows opens the serial port, you need to wait for 5 seconds, and the basic button at the bottom of Windows will restart when it opens the serial port.
//set gripper open or close 0--close 100-open max 0-100
mc.setGripperValue(0, 10);
Thread.Sleep(3000);
mc.setGripperValue(50, 100);
Thread.Sleep(3000);
//set electric gripper
mc.setEletricGripper(0);
Thread.Sleep(100);
mc.setEletricGripper(1);
Thread.Sleep(100);
//get gripper state 0--close 1--open
Console.WriteLine(mc.getGripperValue());
mc.Close();
}
}
}