Control the robot arm to return to the origin
Preparation before starting
M5Stack series: Make sure the robot arm is connected to the computer
Other series: Make sure the machine is normal
Learning content in this chapter
How to use myBlockly to control the robot arm to return to the origin
API introduction
- Method module:
Set angle
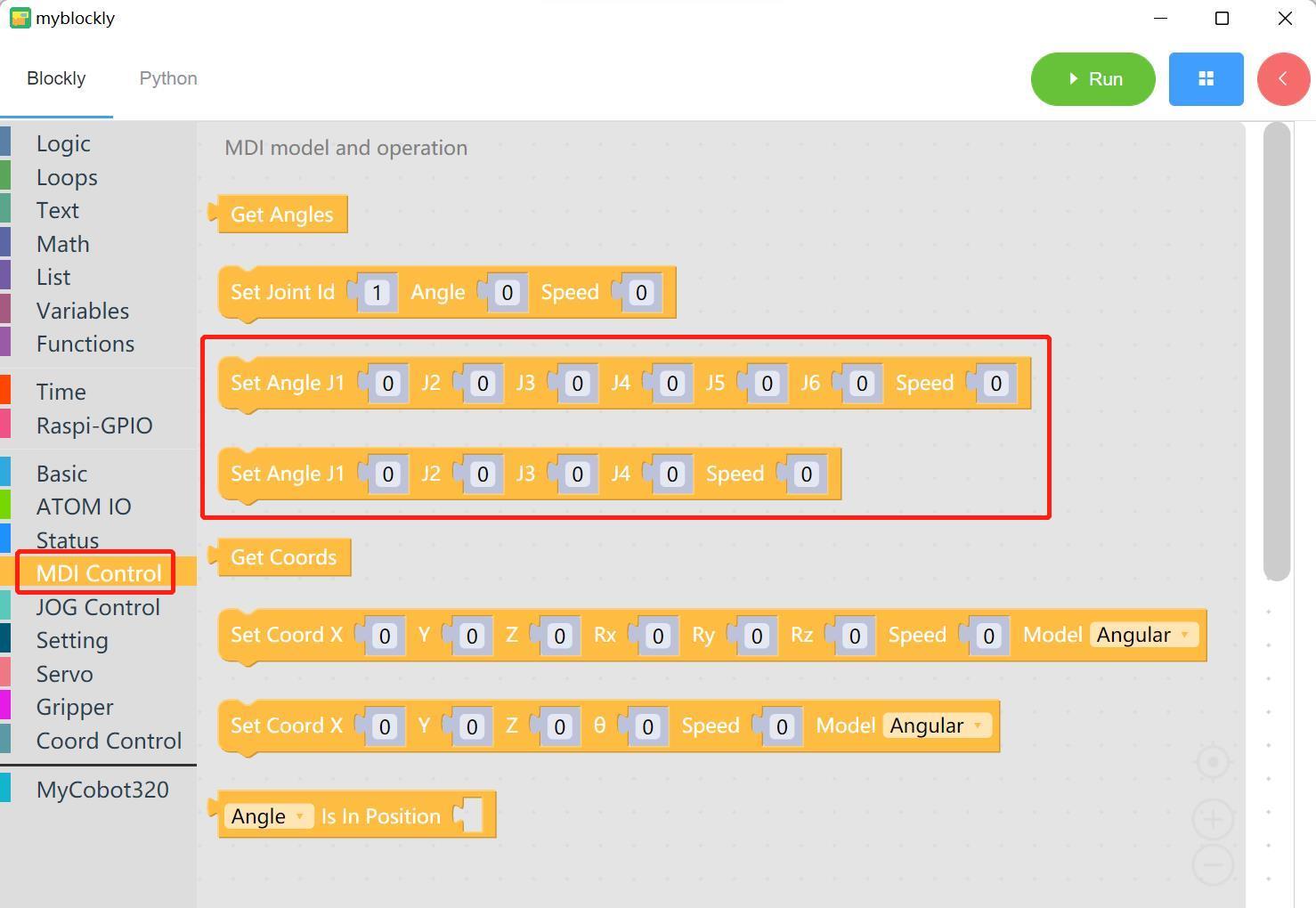

- Scope of application: This module is applicable to the 6-axis myCobot 280 series, mechArm series, myCobot 320 series

Scope of application: This module is applicable to the 4-axis myPalletizer series
Parameter introduction:
This module has two parameters that can be adjusted:
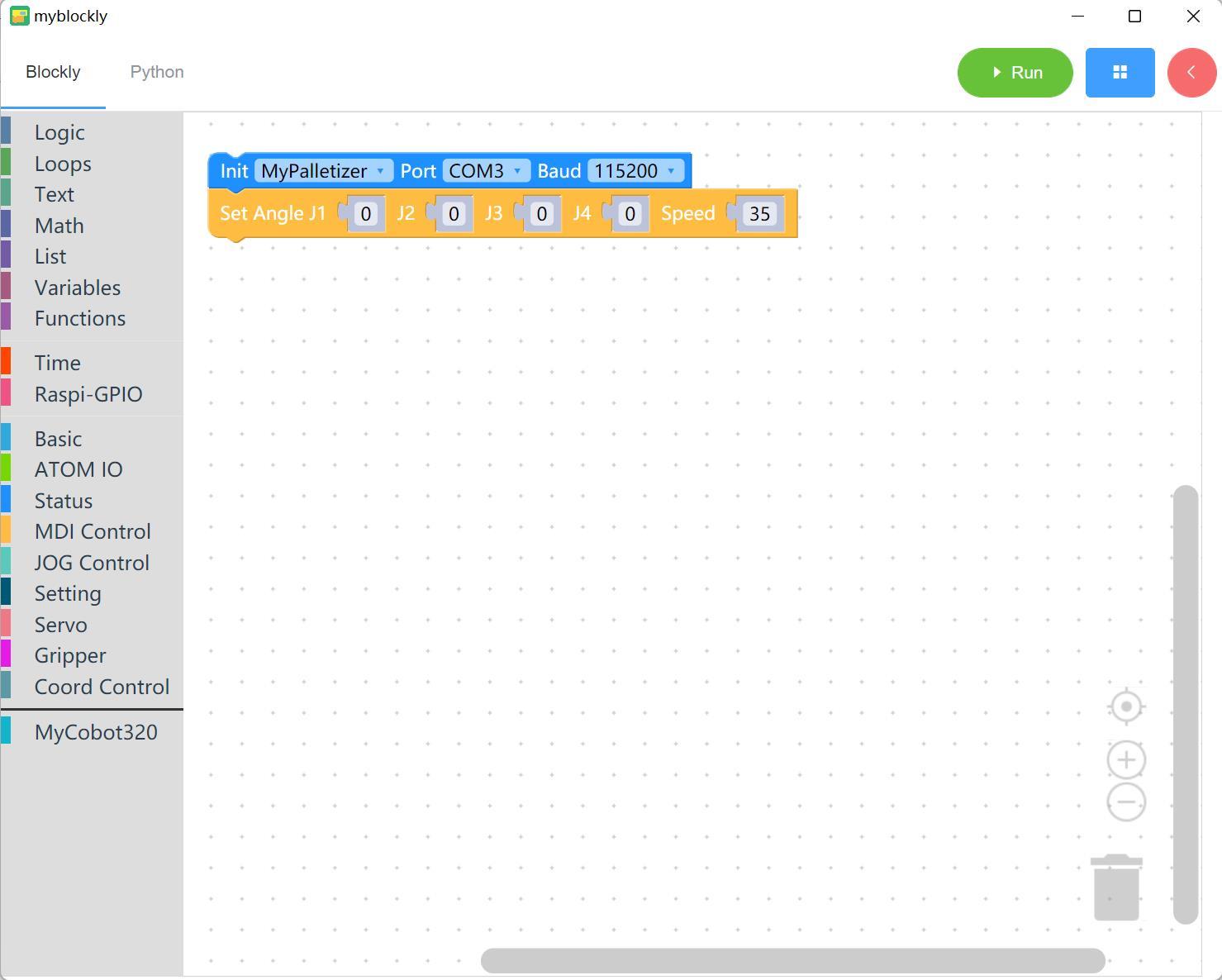
- Joint angle parameters: If the robot arm is returned to the origin, all joint angle parameters must be set to 0
Speed parameters: Please refer to the robot parameter introduction section of 2. Product Introduction
Purpose: Control the robot arm and return the angles of all axes of the robot arm to the origin (angle is 0)
myPalletizer
Simple demonstration
myCobot
Simple demonstration
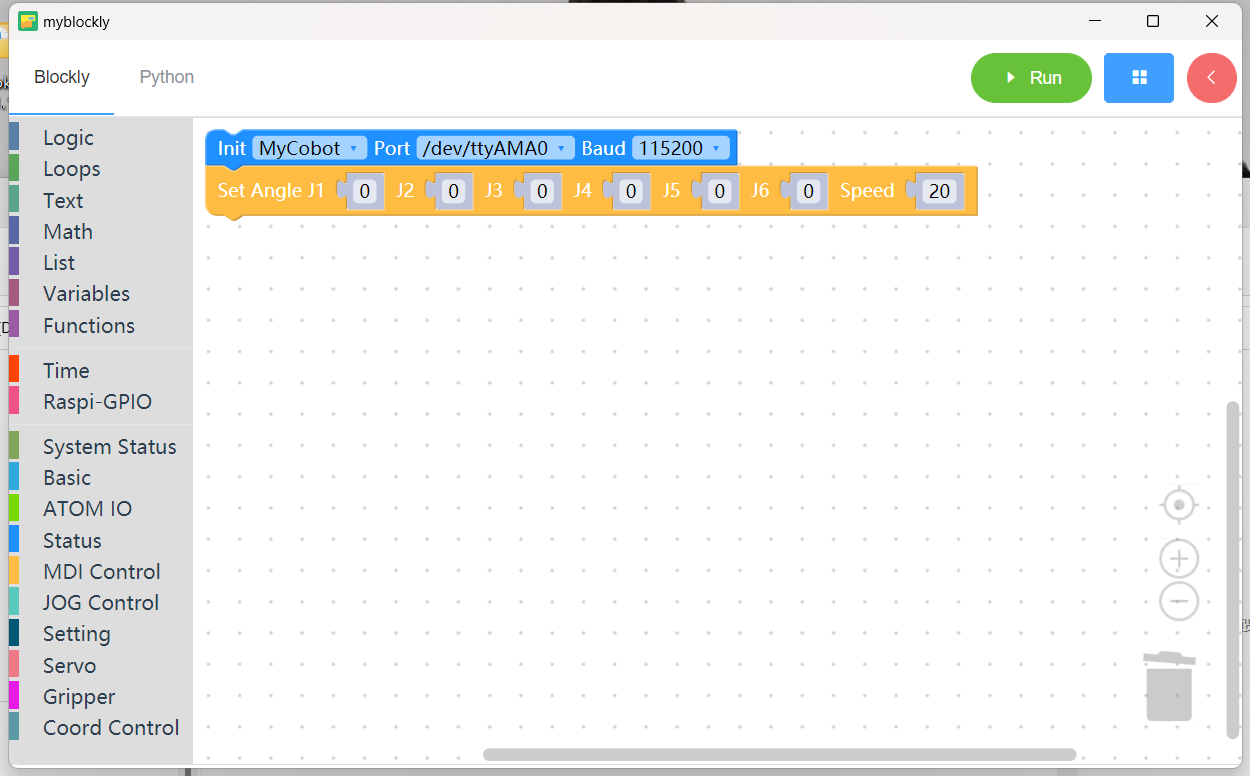
- Implementation content: Control the robot arm to move back to the origin, so that the angles of all axes of the robot arm are 0