Control single joint movement
Preparation before you begin
Make sure the robotic arm is connected to the computer
Make sure the machine is normal
Make sure the machine is power on
Learning content of this chapter
How to use myBlockly to control the single joint movement of the robotic arm
API introduction
method module:
Set Joint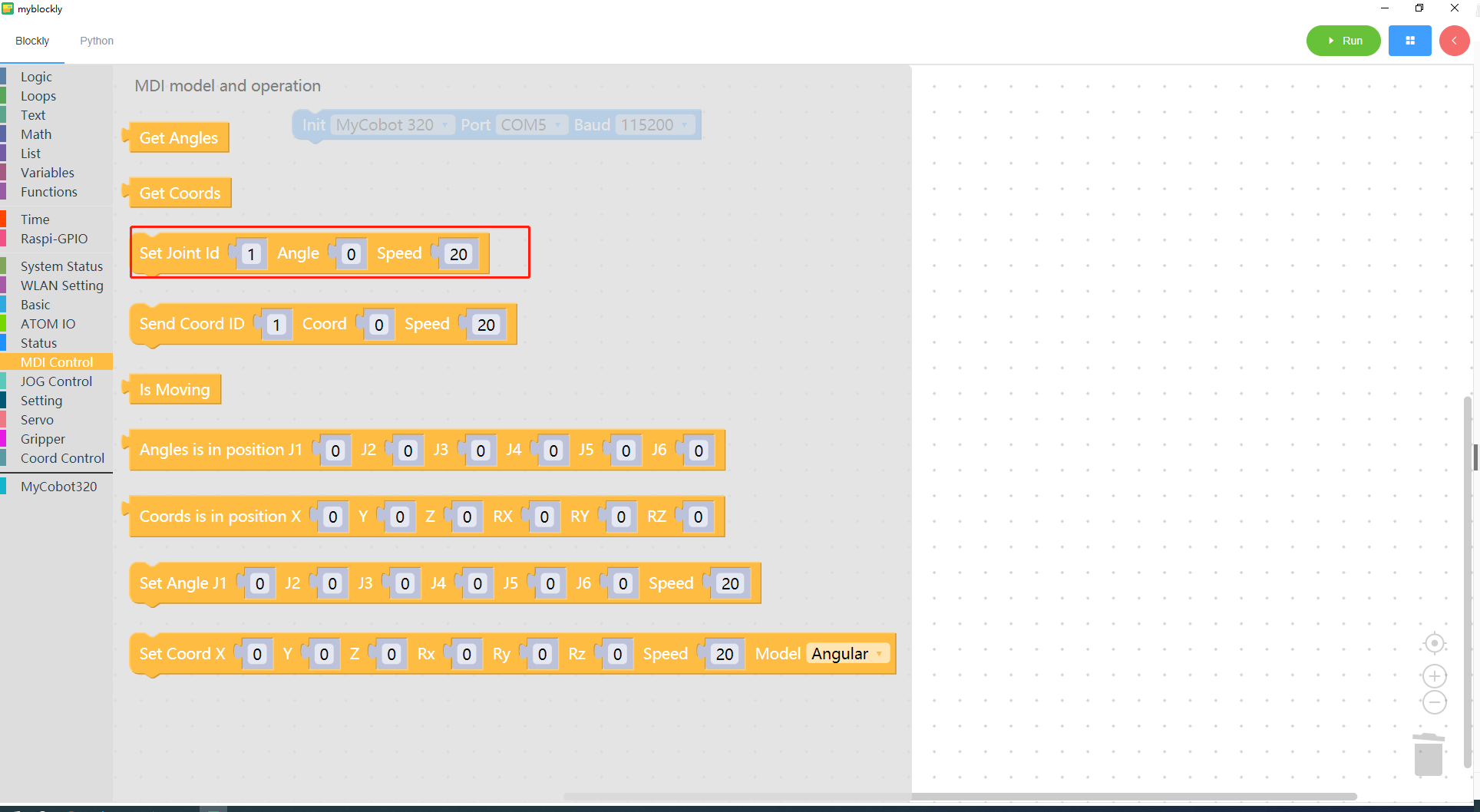

Parameter introduction:
This method has three parameters that can be adjusted:
Joint parameters: The parameter range is: 1-6 (corresponding to the 6 joints of the robotic arm);
Angle parameters: refer to the parameters of the corresponding model
- Speed: Controls the speed of the robot arm movement. The parameter range is: 0~100
Purpose: Control the single joint movement of the robotic arm
Simple demonstration
The graphics code is as follows:
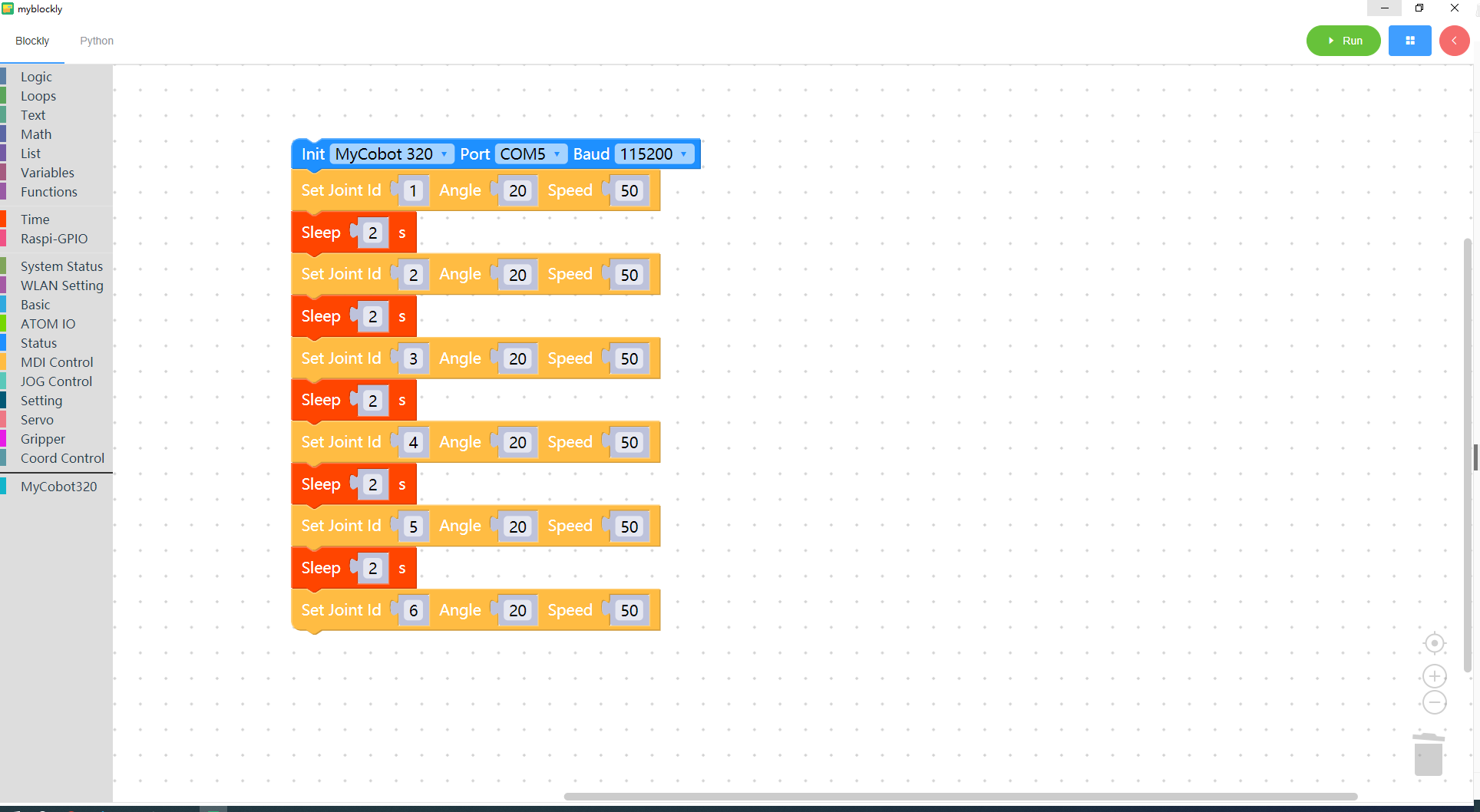
Implementation content:
Control joint 1 of the robotic arm to run at a speed of 50 to the position of joint 1 with an angle of 20. After one second,
Control the 2nd joint of the robotic arm to move at a speed of 50 to the position of the 2nd joint angle of 20. After one second,
Control the 3 joints of the robotic arm to run at a speed of 50 to the position of the 3 joint angle of 20. After one second,
Control the 4 joints of the robotic arm to run at a speed of 50 to the position of the 4 joint angle of 20. After one second,
Control the 5 joints of the robotic arm to run at a speed of 50 to the position of joint 5 with an angle of 20. After one second,
Control the 6 joints of the robotic arm to run at a speed of 50 to the position of the 6 joint angle of 20