硬件问题
Q:机械臂的底座IO和末端IO输出是多少伏的?
- A:24V
Q:机械臂的底座IO和末端IO输出是什么类型的?
- A:PNP类型,高电平有效
Q:机械臂的底座IO和末端IO输入是什么类型的?
- A:NPN类型,低电平有效
Q:机械臂的底座IO和末端IO输出最大电流是多少?
- A:200mA
Q:机械臂走的点位突然不准确?
- A:利用Roboflow将机械臂恢复到关节零位,看看各个关节是否对齐零位刻度线,若有某个关节的刻度线不对,需要重新零位校准
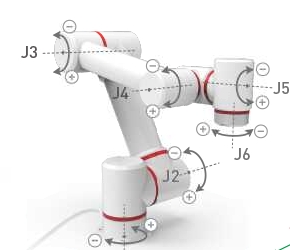
Q:机械臂的笛卡尔运动不正常,关节运动正常?
- A:机械臂在走笛卡尔运动时会有奇异点,所以需要使用关节运动将机械臂调整成如下姿态