Environment Building
pymycobot is a Python package used for serial communication with myCobot. It supports Python2, Python3.5 and later versions.
Before using pymycobot, make sure to build a Python environment. Follow the steps below to install Python.
1 Download and Installation of Python
At present, Python has two versions: 2.x and 3.x. These two versions are incompatible with each other. This section takes the version 3.x as an example due to its increasing popularity.
1.1 Installing Python
The Jetson Nano version comes with an Ubuntu (V-20.04) system and a built-in Python development environment, so you don't need to build and manage it.
2 Preparations
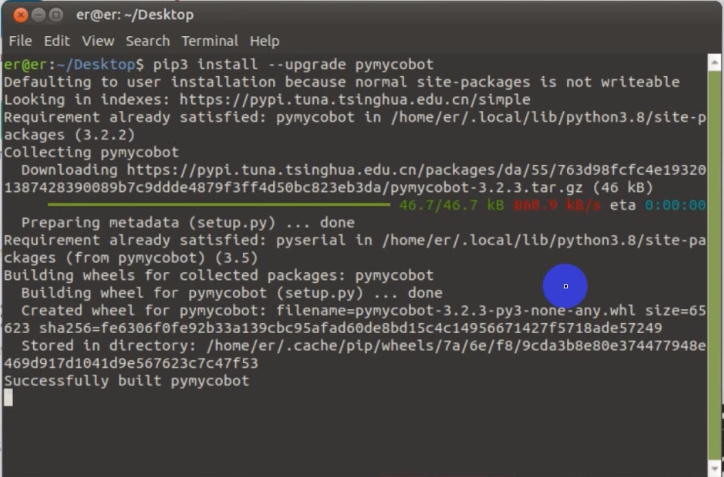
Enter the following command in the terminal:
pip install --upgrade pymycobot
3 Simple Demo
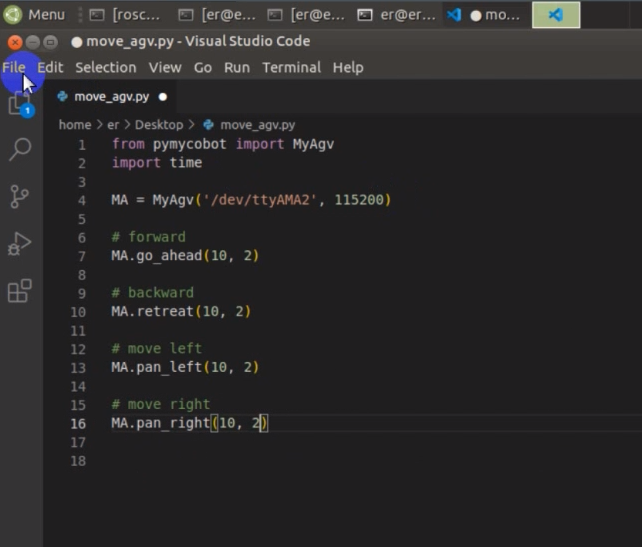
Create a new Python file, and type the following codes.
from pymycobot.myagv import MyAgv
import time
MA = MyAgv('/dev/ttyS0', 115200)
# forward
MA.go_ahead(10,2)
# backward
MA.retreat(10,2)
# move left
MA.pan_left(10,2)
# move right
MA.pan_right(10,2)
4 Run the example file:
python3 move_agv.py
The agv will move in four directions for 5 seconds by default.