MyAGV + 270M5 handle remote control case
Function: Use the handle to control MyAGV + 270M5 to move
1 Hardware installation
Robot arm installation
Fix 270M5 on AGV

Then connect the 12V power cord, Type-C cable, and handle receiver as shown below, and press the AGV power button

After powering on, make sure the bottom screen of 270M5 displays ATOM: OK

The end tool can choose a gripper or a suction pump
Suction pump installation
Insert the Lego connector into the reserved socket on the suction pump

Align the suction pump with the connector inserted into the end socket of the robot arm

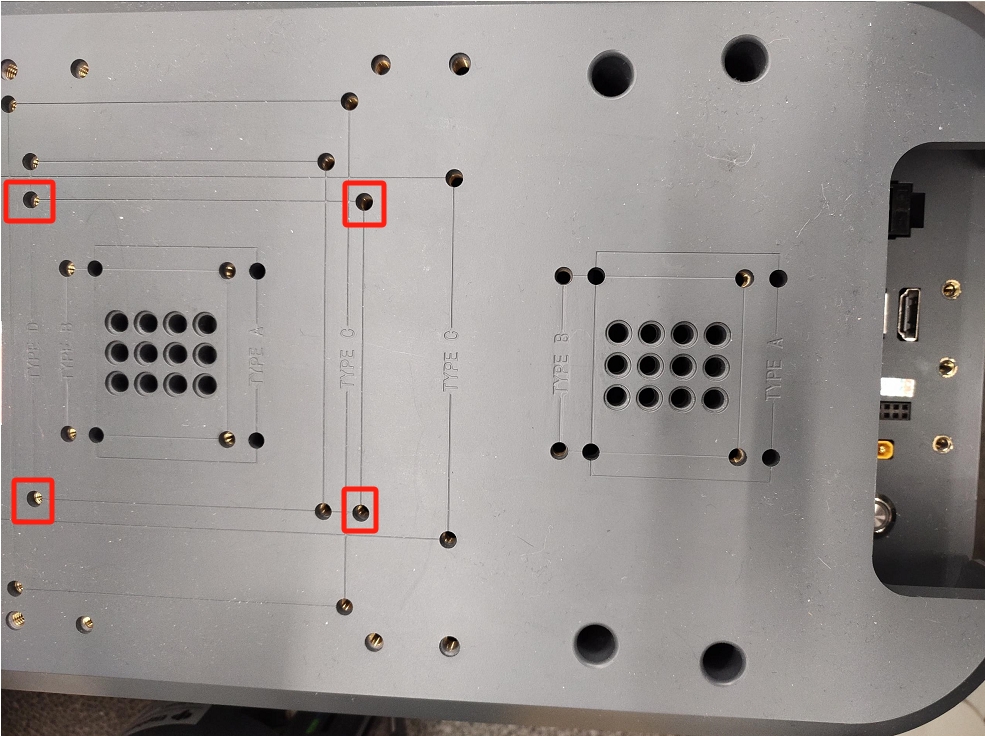
Then connect the male and female DuPont wires to the base IO of the robot arm
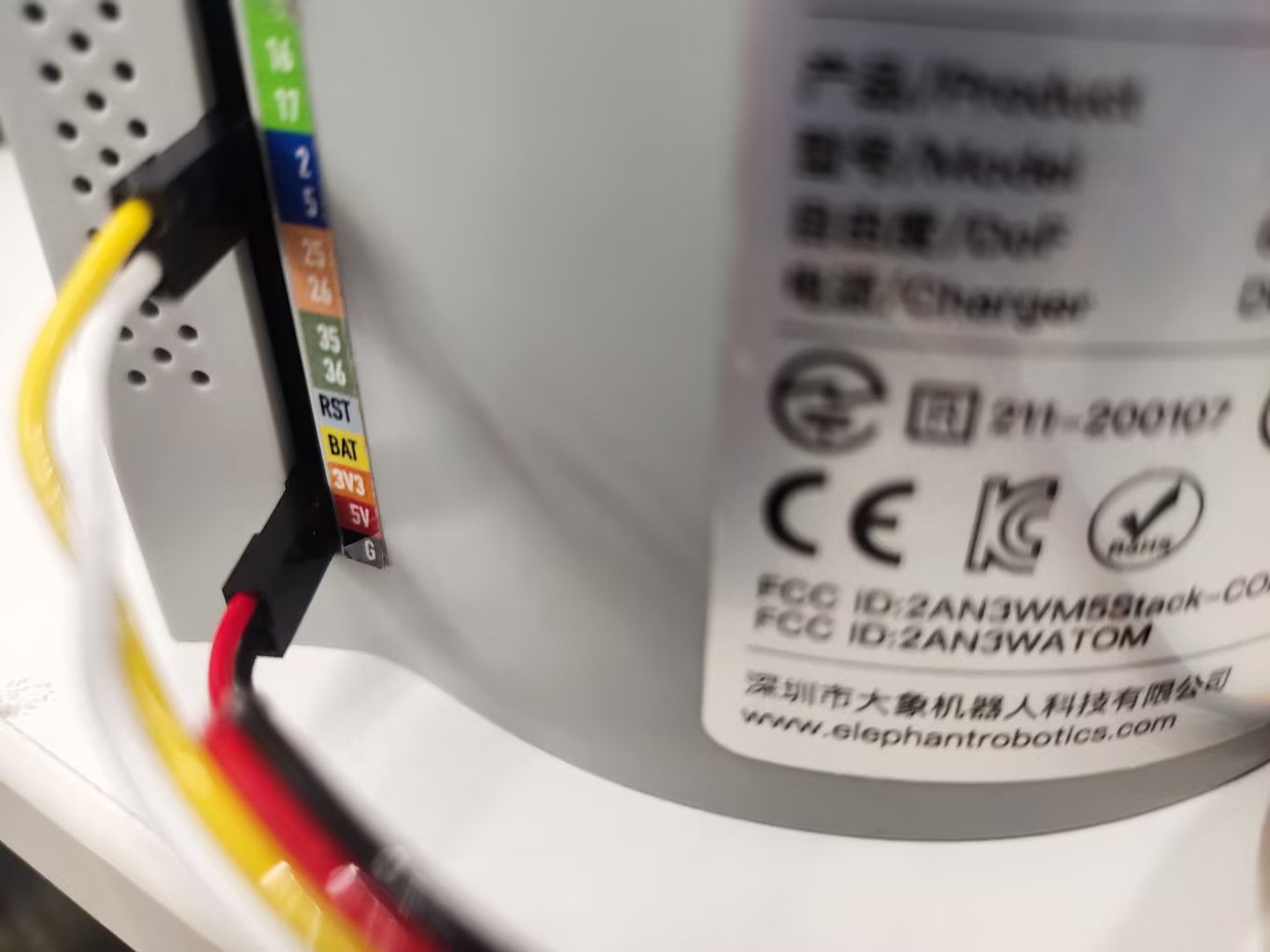
The left side is the suction pump pin, and the right side is the robot arm pin GND -> GND 5V -> 5V G2 -> 2 G5 -> 5
Gripper installation
Insert the Lego connector into the reserved socket of the gripper

Align the gripper with the connector inserted into the socket at the end of the robot arm and insert it

Insert the gripper line into the robot arm control interface

2 Dependent library installation
pip install pygame pymycobot --upgrade
3 Controller function description

4 Controller activation
Turn on the controller switch

Note: When you plug the handle transceiver into the USB port of the AGV for the first time, or when you unplug and plug the receiver or restart the AGV, you need to execute the following program to activate the handle
import pygame
import sys
import time
pygame.init()
pygame.joystick.init()
if pygame.joystick.get_count() > 0:
joystick = pygame.joystick.Joystick(0)
joystick.init()
while 1:
print("Press and hold the MODE button to enter the control mode. The MODE light turns red and you can close this program.")
time.sleep(1)
else:
print("No controller detected")
pygame.quit()
sys.exit()
After executing the program, long press the MODE button of the handle. When the MODE light of the handle turns red, release the MODE button


Note: Only when the MODE LED turns on can the robot arm be controlled. If the handle is not used for a long time, it will enter the standby state. You can press the START button of the handle to activate it

5 Case Reproduction
Start the laser radar
Open the terminal and run the following command
./myagv_ros/src/myagv_odometry/scripts/start_ydlidar.sh
Start the odometer node
roslaunch myagv_odometry myagv_active.launch
Example program
After running the following program, the terminal prints init_ok, and you can start control
from pymycobot import MechArm270
import pygame
import time
import sys
import rospy
from geometry_msgs.msg import Twist
import threading
class CmdVelPublisher:
def __init__(self):
rospy.init_node('cmd_vel_publisher', anonymous=True)
self.pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)
self.move_cmd = Twist()
self.move_cmd.linear.x = 0
self.move_cmd.linear.y= 0
self.move_cmd.angular.z = 0
self.rate = rospy.Rate(10)
self.publish_thread = threading.Thread(target=self.publish_cmd_vel)
self.publish_thread.daemon = True
self.publish_thread.start()
def publish_cmd_vel(self):
while not rospy.is_shutdown():
self.pub.publish(self.move_cmd)
self.rate.sleep()
def set_speed(self, x=0,y=0,yaw=0):
self.move_cmd.linear.x = x
self.move_cmd.linear.y = y
self.move_cmd.angular.z = yaw
pygame.init()
pygame.joystick.init()
button_pressed = False
hat_pressed=False
previous_state = [0,0,0,0,0,0]
cmd_vel_publisher = CmdVelPublisher()
mc=MechArm270("/dev/ttyACM0")
init_angles=[0, 0, 0, 0, 90, 0]
mc.sync_send_angles(init_angles,50)
count=100
mc.set_gripper_state(0,100)
time.sleep(1)
mc.set_fresh_mode(1)
arm_speed=10
print("init_ok")
def pump_on():
mc.set_basic_output(5, 0)
# time.sleep(0.05)
def pump_off():
mc.set_basic_output(5, 1)
# time.sleep(0.05)
mc.set_basic_output(2, 0)
# time.sleep(1)
mc.set_basic_output(2, 1)
# time.sleep(0.05)
def joy_handler():
global button_pressed
global hat_pressed
global previous_state
global count
if event.type == pygame.JOYAXISMOTION:
axis = event.axis
value = round(event.value, 2)
if abs(value) ==1.0:
flag = True
previous_state[axis] = value
if axis==0 and value==-1.00:
mc.jog_coord(2,1,arm_speed)
elif axis==0 and value==1.00:
mc.jog_coord(2,0,arm_speed)
if axis==1 and value==1.00:
mc.jog_coord(1,0,arm_speed)
elif axis==1 and value==-1.00:
mc.jog_coord(1,1,arm_speed)
if axis==2 and value==1.00:
mc.power_on()
if axis==4 and value==1.00:
cmd_vel_publisher.set_speed(x=-0.2)
elif axis==4 and value==-1.00:
cmd_vel_publisher.set_speed(x=0.2)
if axis==3 and value==1.00:
cmd_vel_publisher.set_speed(y=-0.2)
elif axis==3 and value==-1.00:
cmd_vel_publisher.set_speed(y=0.2)
if axis==5 and value==1.00:
cmd_vel_publisher.set_speed(yaw=-0.2)
elif axis==5 and value!=1.00:
cmd_vel_publisher.set_speed()
else:
if previous_state[axis] != 0:
cmd_vel_publisher.set_speed()
mc.stop()
previous_state[axis] = 0
if event.type == pygame.JOYBUTTONDOWN:
if joystick.get_button(0)==1:
count-=10
if count<0:
count=0
mc.set_gripper_value(count,100)
pass
if joystick.get_button(1)==1:
pump_on()
pass
if joystick.get_button(2)==1:
pump_off()
pass
if joystick.get_button(3)==1:
count+=10
if count>100:
count=100
mc.set_gripper_value(count,100)
pass
if joystick.get_button(4)==1:
mc.release_all_servos()
if joystick.get_button(5)==1:
cmd_vel_publisher.set_speed(yaw=0.2)
if joystick.get_button(7)==1:
mc.send_angles(init_angles,100)
if event.type == pygame.JOYBUTTONUP:
if event.button==5:
cmd_vel_publisher.set_speed()
if event.type == pygame.JOYHATMOTION:
hat_value = joystick.get_hat(0)
if hat_value ==(0,-1):
mc.jog_coord(3,0,arm_speed)
elif hat_value ==(0,1):
mc.jog_coord(3,1,arm_speed)
elif hat_value ==(-1,0):
mc.jog_angle(6,0,arm_speed)
elif hat_value ==(1,0):
mc.jog_angle(6,1,arm_speed)
if hat_value != (0, 0):
hat_pressed = True
else:
if hat_pressed:
cmd_vel_publisher.set_speed()
mc.stop()
hat_pressed = False
if pygame.joystick.get_count() > 0:
joystick = pygame.joystick.Joystick(0)
joystick.init()
else:
print("no handler")
pygame.quit()
sys.exit()
running = True
try:
while not rospy.is_shutdown():
for event in pygame.event.get():
joy_handler()
except KeyboardInterrupt:
#print("end")
pygame.quit()
sys.exit(0)
6 Example display