1. 产品概述
myArm Master 750

通用型智能六自由度机械臂
产品简介
myArm Master 750 六自由度运动控制验证的装置 是一款通用型智能机械臂,配备了先进的 Master 主控器。作为一款用于运动控制验证的装置,它适用于多种需要复杂运动控制、精准定位和高度可编程性的场景,可实现端到端数据训练与复现、研究与商业展示。
机械臂具有六自由度的精准操作能力,专为教育和研究领域设计,适合机器学习、AI 和基于视觉等任务。机械臂臂展为 750mm,标准负载为 500g,在特定条件下最大可承载 1kg,能够满足多种科研和实验需求。
设计理念
myArm M750 通用型智能机械臂的设计理念源于对当前科技教育和研究领域需求的深刻理解。机器学习、人工智能等高科技领域快速发展,要求实验设备不仅要有通用功能性,还需具备灵活性和精确性。设计旨在满足这些复杂需求,提供一个既灵活精确又能适应各种应用场景的解决方案。
设计目标

| 设计目标 | 功能实现 |
|---|---|
| 通用多功能平台 | myArm M750 适用于教育、研究和商业展示等多种应用场景。其六自由度和 750mm 臂展支持在各种工作环境中执行复杂的运动控制,如精准定位和路径规划。 |
| 科研和教育支持 | myArm M750 适合机器学习和人工智能研究,能执行高精度的实验和技术演示。它支持端到端数据训练与复现,以及基础的视觉任务,是实验室中的理想设备。 |
| 可编程性与扩展性 | myArm M750 的高度可编程性允许用户根据新兴技术自定义和编程,满足未来的技术需求,实现优化操作和实验结果。 |
| 技术创新与知识传播 | 在商业展示中,myArm M750 可作为展示最新科技成果的平台载体,旨在提高公众对科技的理解和兴趣,推动科技创新向商业化转化。 |
产品特点
| 特征描述 | 内容 |
|---|---|
| 6 自由度模块化设计 | 灵活性与可扩展性的完美结合,适合复杂操作。 |
| 工业级数字伺服电机 | 保证机械臂的精准控制和长期稳定运行。 |
| 高精度编码器 | 提供精确的位置、速度和加速度信息,优化性能。 |
| 支持多种开发环境 | 包括 Python 和 ROS,满足不同开发需求。 |
| 支持本地化拖动示教 | 直观的学习和操作方式,不依赖外部设备。 |
| 高速数据接口 | 开放多种状态接口,支持复杂应用。 |
| 定制化嵌入式软件 | 提供用户友好的操作界面,简化复杂任务。 |
| 内置 2 寸显示屏 | 实时显示机械臂状态和操作反馈。 |
| 多连接方式支持 | 灵活的场景应用,无缝接入现有系统。 |
| 中心对称式构型 | 确保均衡稳定,提高操作精度。 |
产品价值
| 增强实验和研究能力 | myArm M750 为研究人员提供了一个能够进行高精度操作的平台,帮助进行复杂数据分析和算法验证。 |
| 提高教育质量 | 在教育环境中,该设备能够提供实践操作的机会,帮助学生更好地理解理论,并培养实际操作能力。 |
| 增加商业和展示机会 | M750 不仅限于实验室使用,其在技术展会和公众演示中的应用,能够吸引观众和潜在客户,增强技术展示的互动性和吸引力。 |
行业贡献
| 促进 STEM 教育 | 通过提供高级的教学工具,激发学生对科学、技术、工程和数学领域的兴趣,培养未来的创新者。 |
| 推动技术采用 | 通过提供易于使用且高度灵活的机器人平台,降低技术门槛,使更多机构能够接触和利用先进的机器人技术。 |
| 激发创新和个人发展 | 为开发者和工程师提供一个开放的平台,支持跨学科的学习和创新,为机器人技术及相关领域的未来发展培养关键人才。 |
2. 产品应用

用户群体
| 高等教育机构和研究实验室 | myArm M750 是专为高精度实验和技术演示而设计的教学与科研工具。它能有效支持复杂数据分析、算法开发和验证活动,显著提升研究质量和教育效果。 |
| 技术开发者和工程师 | 支持 Python 和 ROS 两种开发环境,myArm M750 适合需要个性化编程和系统集成的专业人员。其模块化设计和高度可编程性使其成为开发和测试新控制算法或机器人应用的理想平台。 |
| 商业展示和公共展览组织者 | myArm M750 以其精密操作展示优势,成为科技展示和产品演示的首选设备。动态演示不仅吸引观众,还增强参与感,有效推广科技创新和产品。 |
| 创新企业和初创公司 | myArm Master 750 为寻求集成尖端机器人技术以提升产品功能或优化生产流程的企业提供强大支持。其出色的性能和适应性使其成为探索新技术和解决方案的理想选择。 |
应用场景
| 用户群体 | 应用场景 | 优势目标 |
|---|---|---|
| 教育领域教师和学生 | - STEM 教育 - 机器人项目 - 跨学科研究项目 - 机器人学科教具 |
- 提高学生对科技的兴趣 - 增强动手能力和解决问题的能力 - 促进创新思维和团队合作 - 作为机器人结构设计、电路设计和力学分析等学科建设工具 |
| 技术开发者和工程师 | - 原型开发 - 实验研究 - 算法测试和验证 - 机器人运动学验证 - 机器人复合场景应用验证 |
- 加速研究进展 - 连接理论与实践 - 推进技术创新 - 验证机器人运动学和复合场景应用 |
| 商业演示和营销专业人士 | - 展览展示 - 技术演示 - 品牌推广 |
- 吸引潜在客户和投资者 - 展示公司技术实力和创新产品 - 提升品牌影响力 |
| 工程师和技术开发人员 | - 机器人运动学验证 - 机器人远程遥控场景探索和开发 - 机器学习、AI 和基于视觉任务 |
- 进行 C650 的验证机器操作 - 探索和开发机器人远程遥控应用 - 扩展机器人技术应用和场景的实用性 |
周边配件
多样化的周边配件为 myArm M750 机械臂提供了广泛的功能扩展,使其适用于各种工业、研究和教育场景。用户通过结合这些配件,可以显著提高 myArm M750 机械臂的灵活性和实用性。
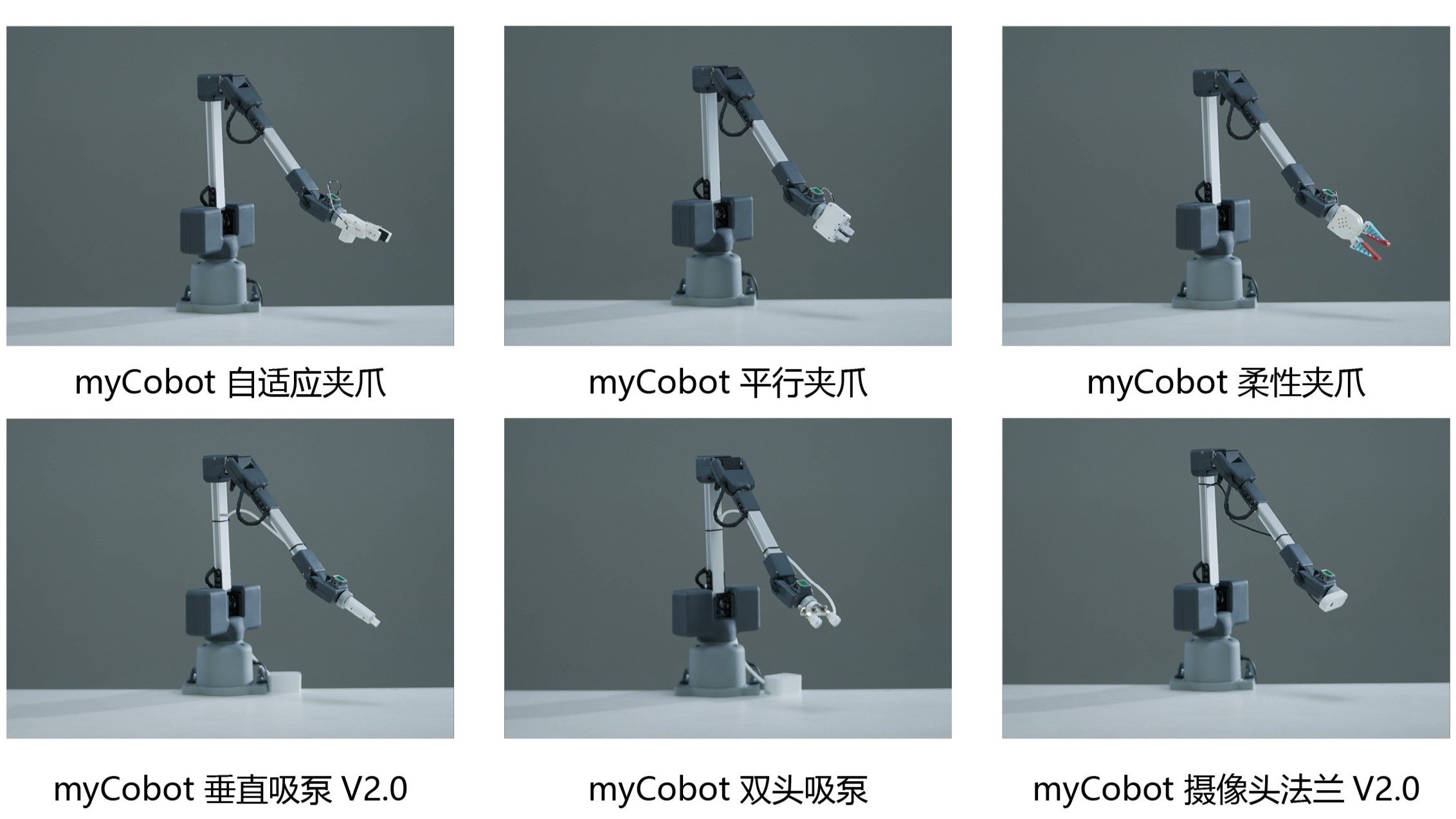
myCobot 自适应夹爪
夹爪可自动调节以适配不同形状和大小的物体,专为执行复杂的抓取任务而设计,如处理不规则形状或易碎物品。其卓越的灵活性和适应性显著增强了机械臂的操作效能和应用广度。升级版自适应夹爪具备更强的夹持力,并兼容多种编程环境,适配多种工业级机械臂。
myCobot 平行夹爪
专为需要精确控制的任务设计,如电子设备的组装和测试。夹爪的两个指尖平行移动,确保在抓取过程中物体稳定,理想用于处理均匀形状的物体。其结构紧凑,多个连接孔设计满足不同的安装需求,同时支持 IO 和串口控制,兼容各种工业级机械臂。
myCobot 柔性夹爪
柔性夹爪适用于处理敏感或易损的物体,其夹持面柔软且有弹性,能有效减少对物体的压力,降低损坏风险。适合抓取玻璃、塑料或瓷器等易碎物品。指尖由橡胶制成,利用气压变形进行抓取,广泛应用于各种自动化和机器人领域,因其柔性、适应性和高效性而备受青睐。
myCobot 垂直吸泵 V2.0
垂直吸泵 V2.0 是升级版的真空吸附系统,用于垂直提升光滑表面物体,如金属板、玻璃或塑料。新版本具有更强的吸附能力和更高的耐用性,特别适用于快速和重复的搬运作业。
myCobot 双头吸泵
双头吸泵配备两个独立吸盘,使机械臂能同时搬运两个物体或提供更大的稳定性和支持力,增强在装配线任务或多部件同时处理的应用中的效率。
myCobot 摄像头法兰 V2.0
摄像头法兰 V2.0 使标准摄像头能够安装至机械臂上,为机械臂提供必要的视觉反馈,特别适用于需要视觉识别的任务,如质量检查、颜色分拣或精确放置。
myCobot 手机支架
此配件让 myCobot 机械臂能够持有并操作智能手机或类似设备,适用于自动化测试手机应用、进行教育演示或使用手机摄像头进行特定场景下的操作。
3. 支持的扩展开发

myArm 系列机械臂在教育和科研领域中极具价值,特别是在 Python 和 ROS(Robot Operating System)这两个广泛使用的开发环境中。这些环境提供了强大的支持,使得 myArm 系列产品能够广泛应用于机器学习、人工智能研究、复杂运动控制以及视觉处理任务中。
| Python | - 提供关节角度控制、伺服电机控制、伺服电机参数配置、笛卡尔坐标系控制等接口。 - 支持更高级的运动控制和精准定位,适合进行复杂的机器人学研究和应用开发。 - 驱动库可通过 PyPI 下载安装,提供全面的接口支持,适合需求更为复杂的教育或研究项目。 |
| ROS | - 支持 MoveIt 基本功能,如键盘控制和基础路径规划,提供 ROS1 和 ROS2 双版本支持。 - 通过 RVIZ 仿真环境加强实时机械臂显示和状态信息采集,适合进行更高级的机器人路径规划和操作研究。 |
| 硬件接口 | - 包括 IO、USB 等,方便连接各种传感器和执行器。 |
| 软件库 | - 提供丰富的开源库和 API 来简化开发过程。 |
| 系统兼容性 | - 兼容 Windows、Linux、MacOS,适应多种开发环境。 |
4. 购买地址
如果您有兴趣购买该设备,请点击下面的链接:
淘宝:https://shop504055678.taobao.com
Shopify:https://shop.elephantrobotics.com/
速卖通:https://elephantrobotics.aliexpress.com/store/1101941423