拖动示教
机器人拖动示教是指操作者可以直接拖动机器人的关节,使其做出理想的姿势,然后进行相应的记录。
cobot 是较早具备这一功能的系统。这种示教方式避免了传统示教的各种弊端,是机器人应用的一项前瞻性技术。
在本章中,我们将教你如何轻松上手,体验 cobot 拖动教学的乐趣。
它们的大致步骤如下:
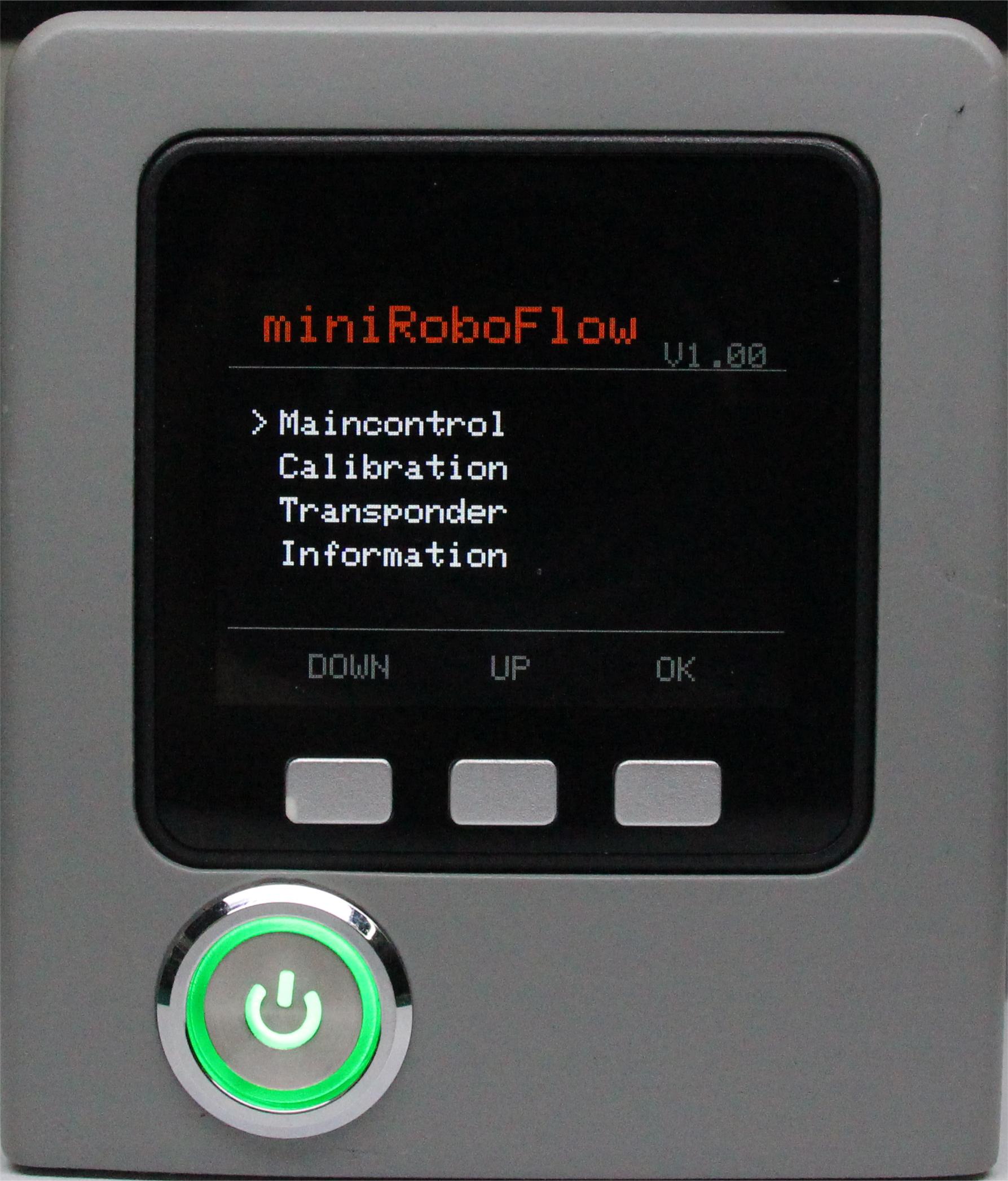
Step 1:选中Maincontrol点击OK进入拖动示教界面。
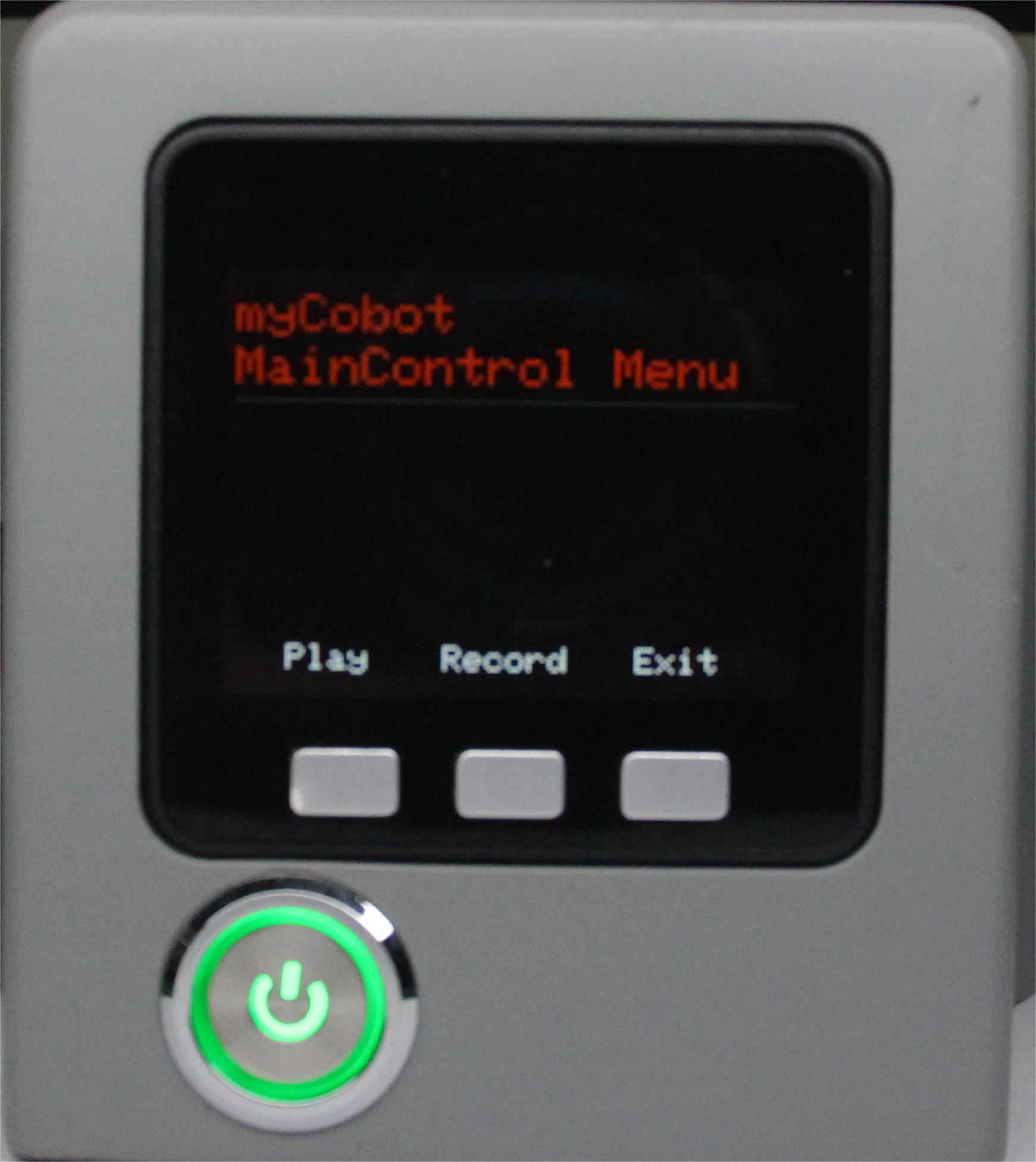
Step 2: 按下录制按钮Record。
Step 3: 选择储存路径,按下Ram。

Step 4: 拖动机械臂各关节,移动至您预想的位置,完成一组运动。
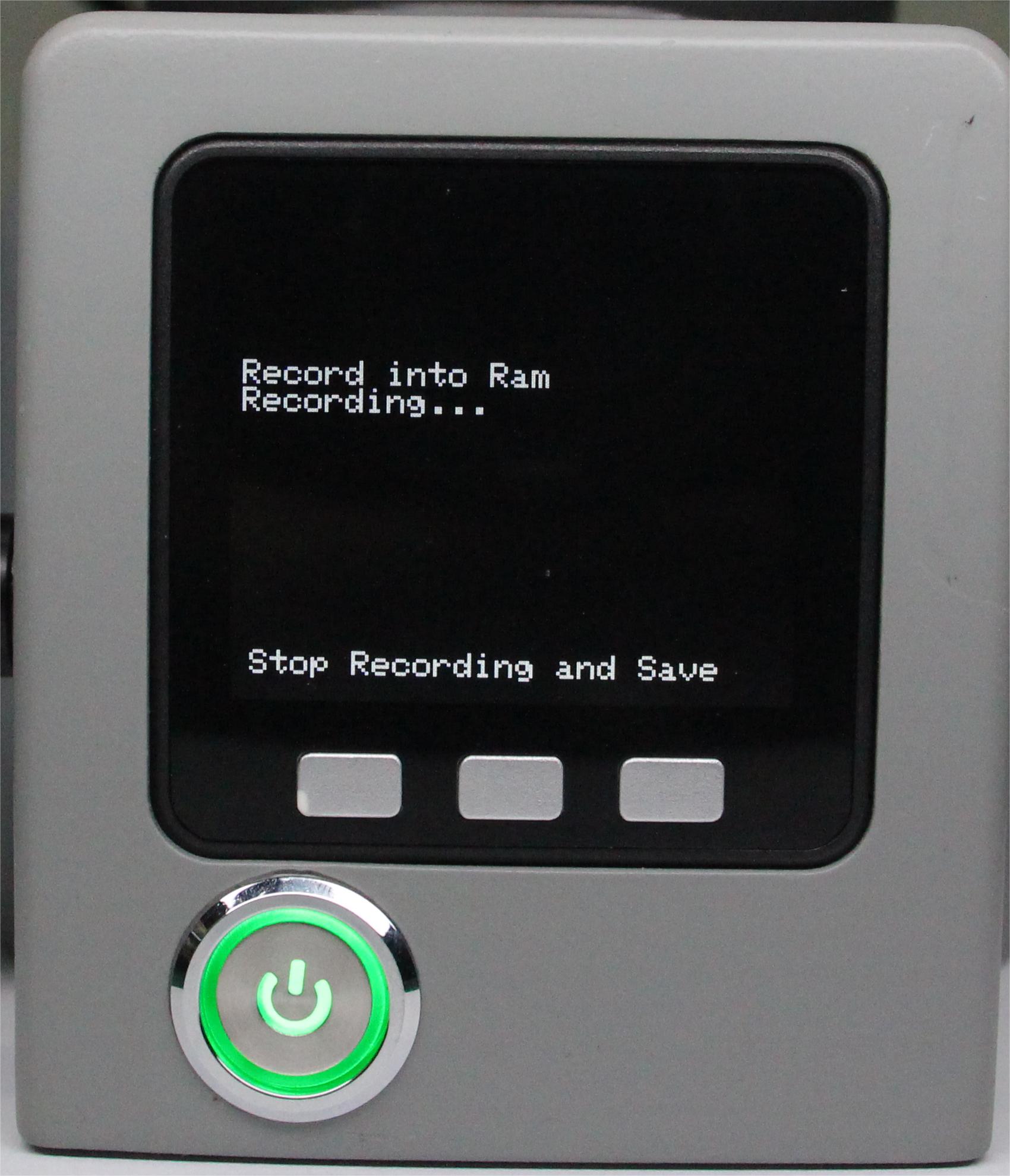
Step 5: 按下任意键停止录制,保存记录。
Step 6: 按下播放按钮Play。

Step 7: 按下Ram,机械臂开始播放已保存的记录。

Step 8: 按下Pause可暂停运动,按下Stop可停止运动,按下Play可恢复运动。
Step 9: 点击Exit退出此功能。