通信
我们的MyarmM750主要是采用的是 话题(Topic) 的方式进行通信
话题(Topic)是ROS最常用的通信机制之一、它基于发布者-订阅者模式,其中一个节点作为发布者(Publisher)发布消息,而其他节点作为订阅者(Subscriber)接收消息。发布者可以同时向多个订阅者发布消息,而订阅者可以从多个发布者接收消息。这种方式非常适用于需要实时数据更新的情况,例如传感器数据的处理和实时控制。
首先在.py文件中创建一个Publisher,将我们的消息发布给MyarmM750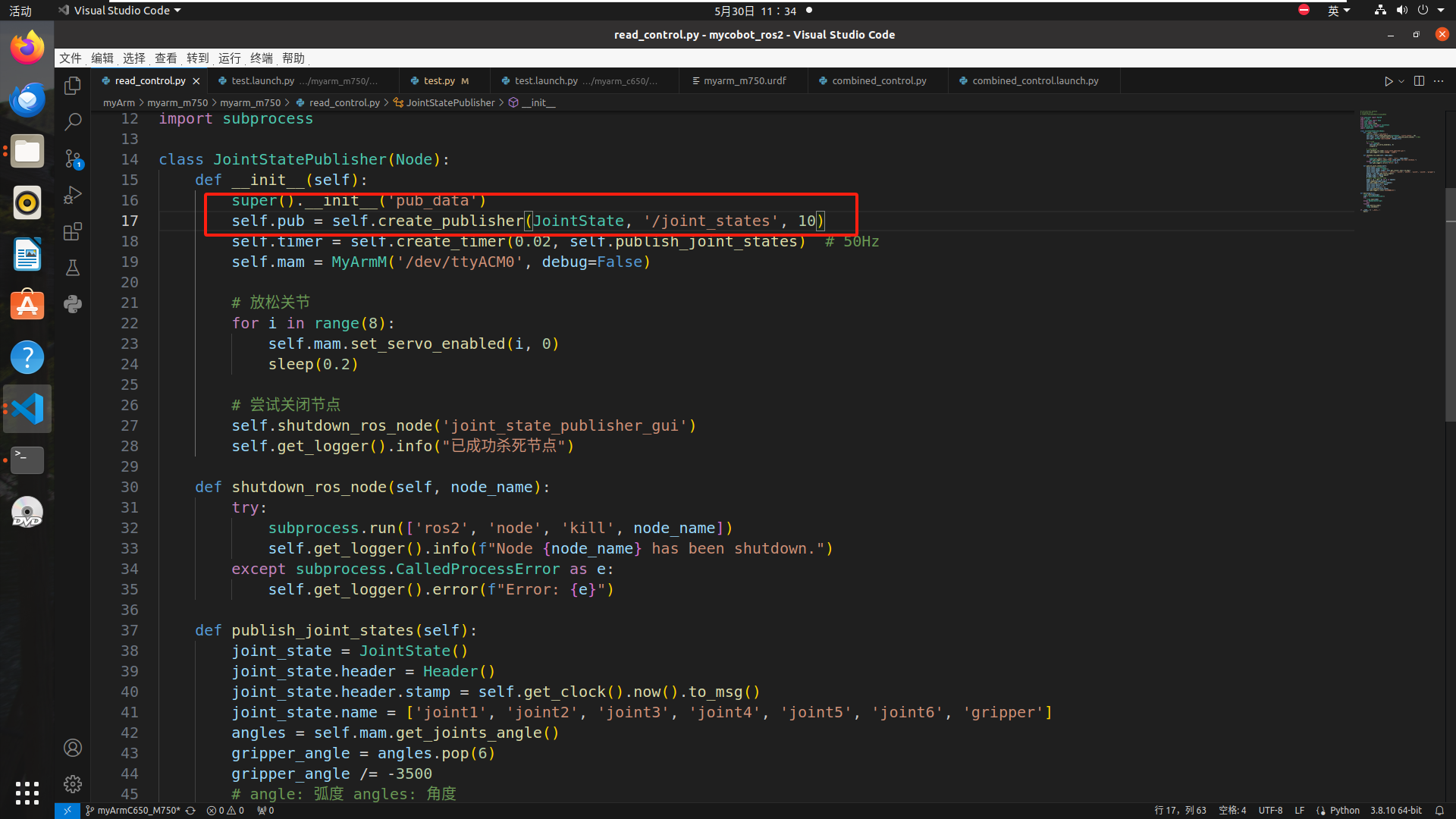
接下来在工作空间打开终端,先编译:
colcon build
再新建一个终端,输入:
soure install/setup.bash
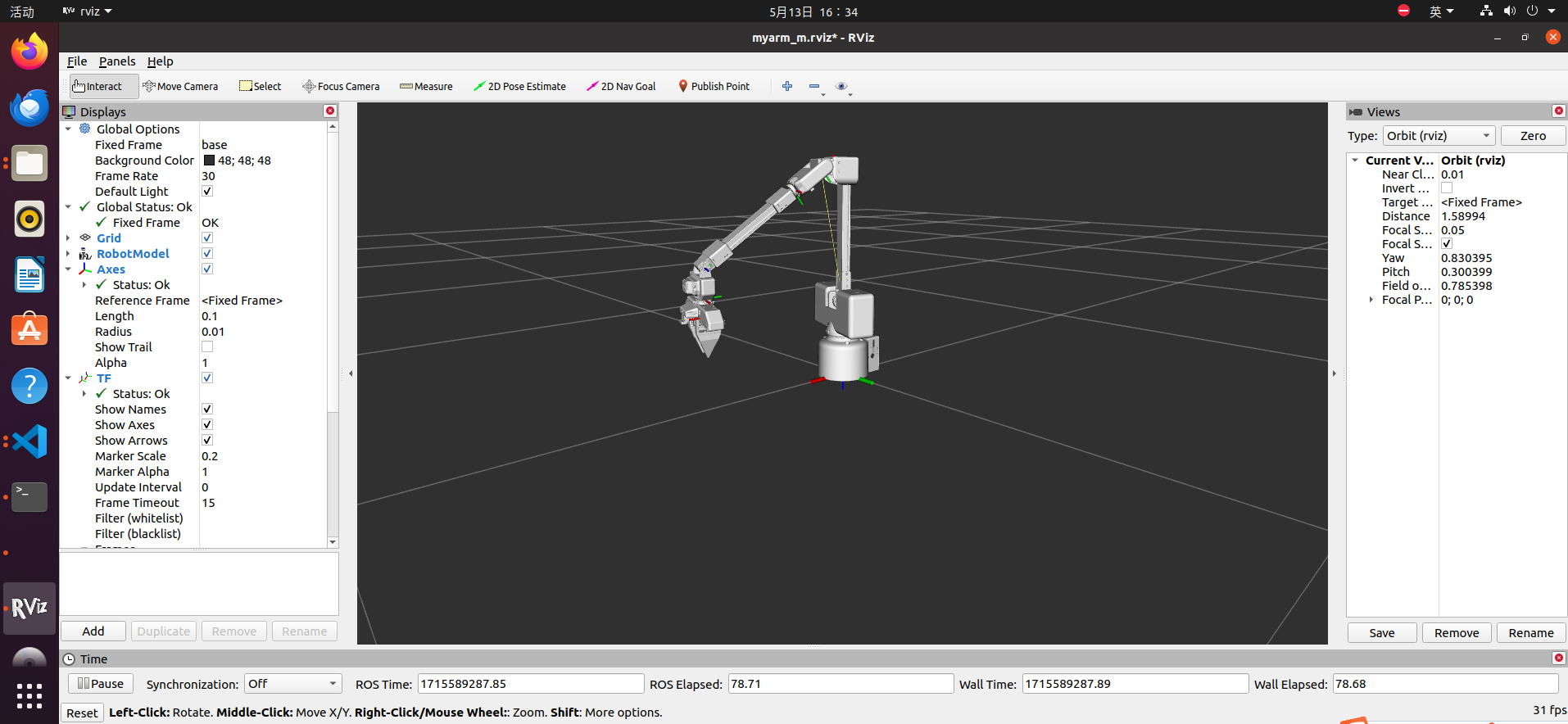
ros2 launch myarm_m750 test.launch.py
打开rviz2后再启动我们的 read_control.py 文件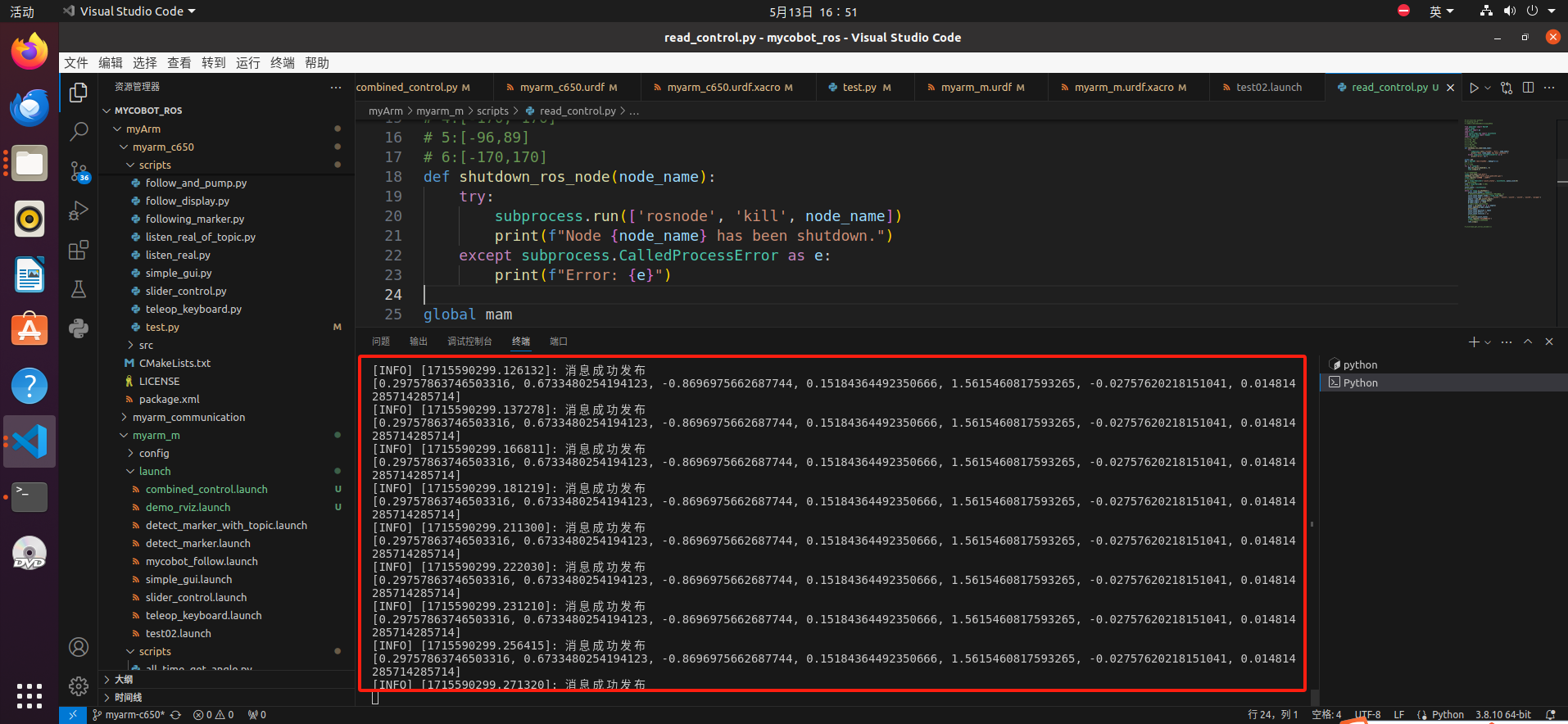
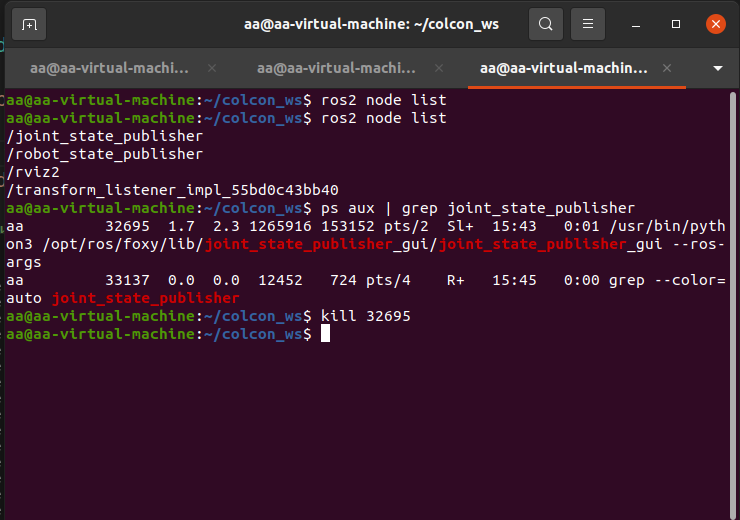
在工作空间里再新建一个终端,输入下面指令,先查看正在运行的节点,再查看joint_state_publisher节点的PID 最后kill这个节点生成的数字串:
ros2 node list
ps aux | grep joint_state_publisher
kill 32695 #这串数字是随即生成的
最后我们再在终端中输入:
rqt_graph
我们能看到节点的所有信息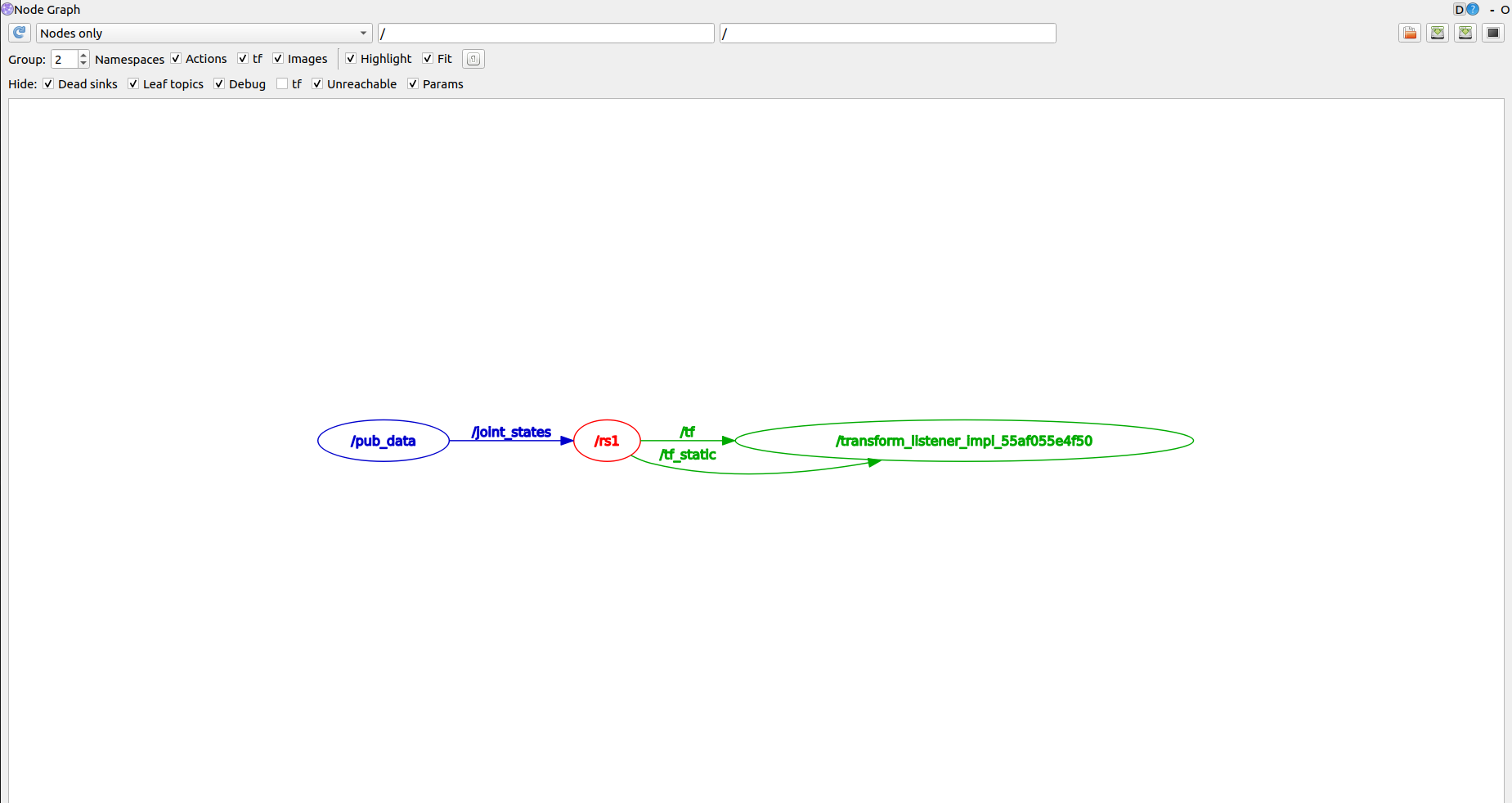
MyarmM750是处于可以用手控制其运动的状态