演示代码与视频
以下视频供参考。
注: 各款设备的对应的波特率不尽相同,使用时请查阅资料了解其波特率,串口编号可通过 计算器设备管理器或串口助手进行查看。
1. 获取关节角度
1.1 摇操固件读取角度
from pymycobot import MyArmM
import time
myarmm = MyArmM("COM3")
# 获取所有关节的当前角度
angles = myarmm.get_joints_angle()
print(f"当前所有的关节角度是: {angles}")
time.sleep(0.1)
# 获取关节1的角度
angle = myarmm.get_joint_angle(1)
print(f"关节1当前的角度为 {angle}")
# 获取关节2的角度
angle = myarmm.get_joint_angle(2)
print(f"关节2当前的角度为 {angle}")
# 获取关节3的角度
angle = myarmm.get_joint_angle(3)
print(f"关节3当前的角度为 {angle}")
1.2 坐标固件以读取角度
from pymycobot import MyArmMControl
myarmm = MyArmMControl("COM3")
# 获取所有关节的当前角度
angles = myarmm.get_angles()
print(f"所有当前关节角度: {angles}")
2. 控制关节以移动 5 个点
2.1 摇操固件控制关节移动 5 个点
from pymycobot import MyArmM
import time
myarmm = MyArmM("COM3")
# 将所有的关节复位, 速度为40
myarmm.set_joints_angle([0, 0, 0, 0, 0, 0], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节按照指定的角度移动, 速度为40
myarmm.set_joints_angle([90, 45, -90, 90, -90, 90], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节复位, 速度为40
myarmm.set_joints_angle([0, 0, 0, 0, 0, 0], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节按照指定的角度移动, 速度为40
myarmm.set_joints_angle([90, 45, -90, 90, -90, 90], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节复位, 速度为40
myarmm.set_joints_angle([0, 0, 0, 0, 0, 0], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节按照指定的角度移动, 速度为40
myarmm.set_joints_angle([90, 45, -90, 90, -90, 90], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
2.2 坐标固件控制关节移动 5 个点
from pymycobot import MyArmMControl
import time
myarmm = MyArmMControl("COM3")
# 将所有的关节复位, 速度为40
myarmm.write_angles([0, 0, 0, 0, 0, 0], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节按照指定的角度移动, 速度为40
myarmm.write_angles([90, 45, -90, 90, -90, 90], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节复位, 速度为40
myarmm.write_angles([0, 0, 0, 0, 0, 0], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节按照指定的角度移动, 速度为40
myarmm.write_angles([90, 45, -90, 90, -90, 90], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节复位, 速度为40
myarmm.write_angles([0, 0, 0, 0, 0, 0], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
# 将所有的关节按照指定的角度移动, 速度为40
myarmm.write_angles([90, 45, -90, 90, -90, 90], 40)
# 等待所有关节运动到指定位置
time.sleep(3)
3 控制程序案例
程序地址
https://github.com/elephantrobotics/pymycobot/tree/main/demo/myArm_M&C_demo
安装依赖项
pip install -r requirement.txt
运行程序
python main.py
程序使用说明
串口的打开有顺序要求:先打开myArmM的串口连接,再打开myArmC的串口连接。
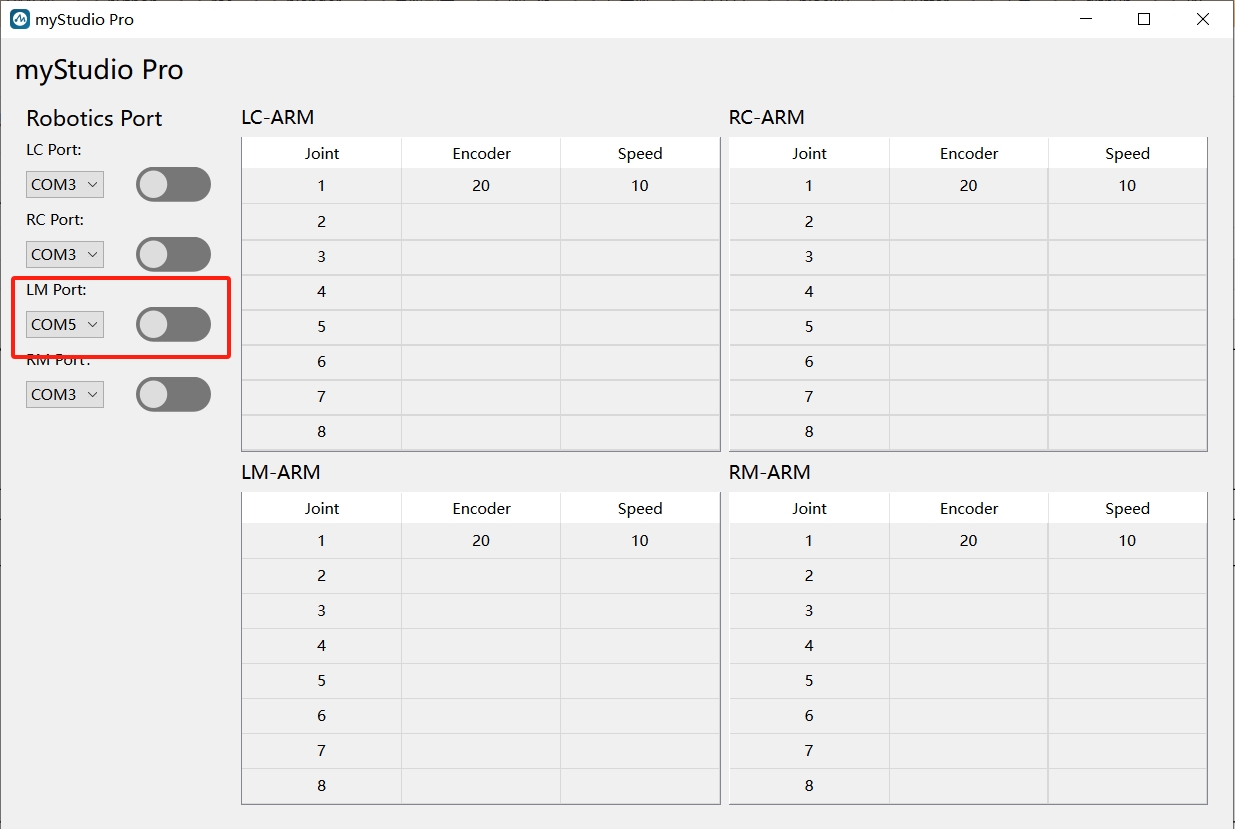
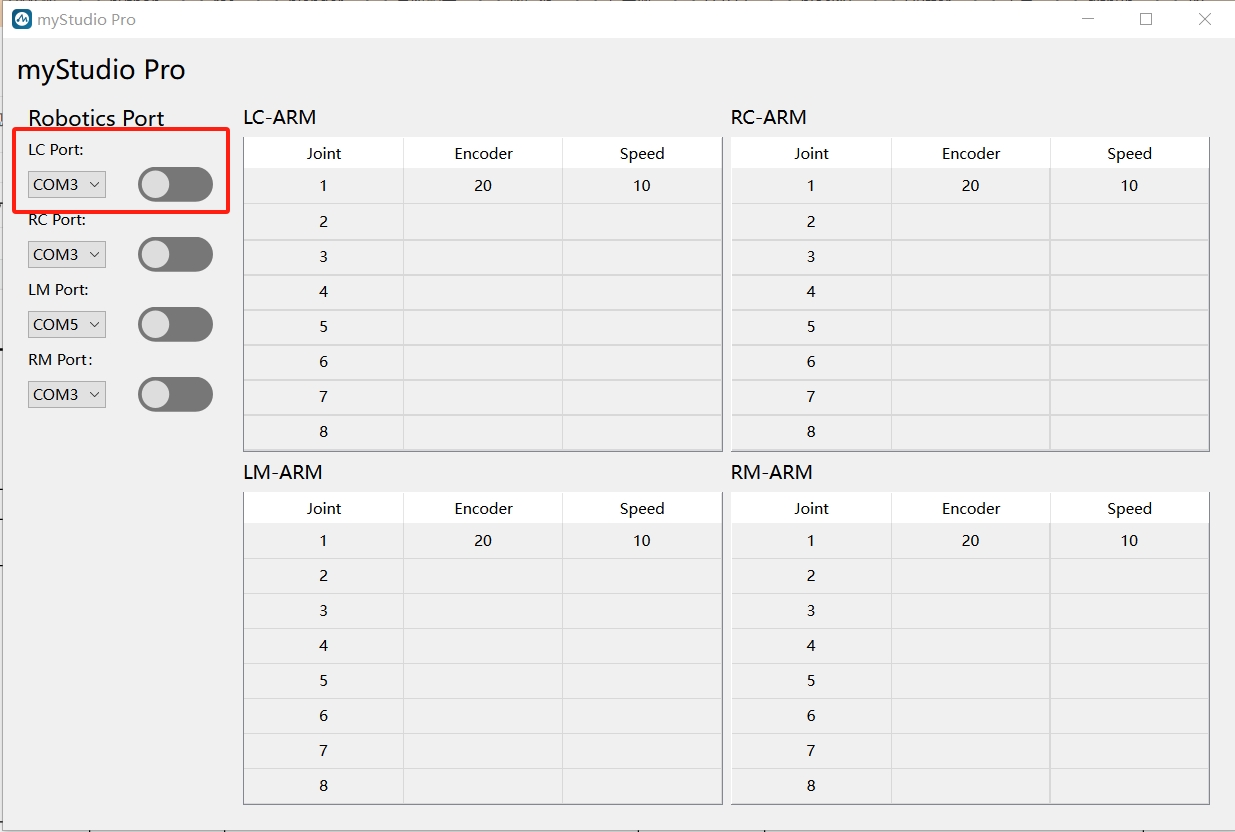
两个串口都打开后,您可以通过移动
myArmC来控制myArmM的移动。