机器人码垛搬运案例
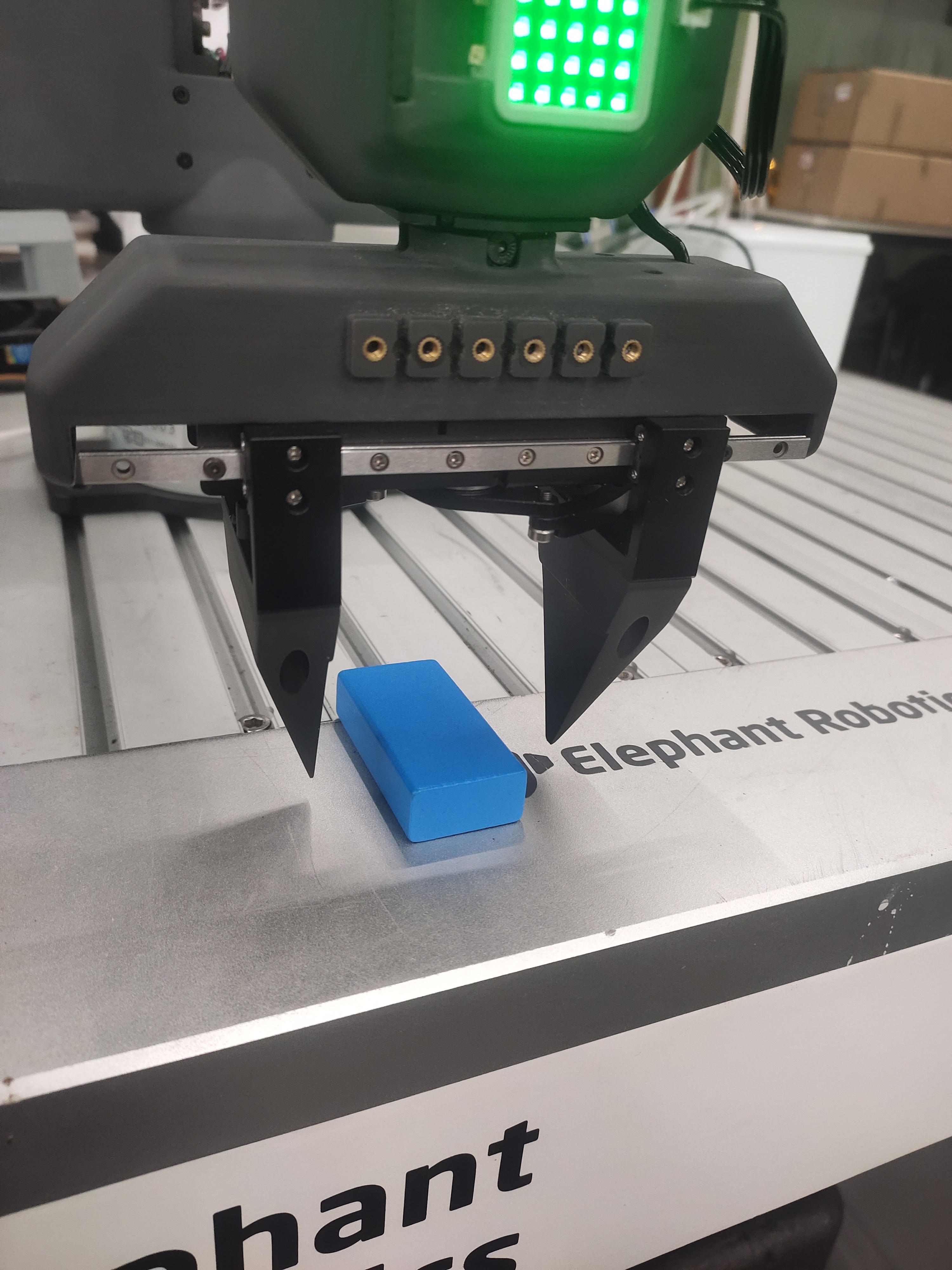
功能说明:机器人将木块从A点搬运到B点
1 固件烧录
由于机器人需要使用笛卡尔运动,所以需要烧录支持笛卡尔运动的pico固件和basic的固件,但目前支持笛卡尔运动的固件并未发布到mystudio上,只能通过联系售后人员进行获取。
2 pymycobot安装
如果要使用笛卡尔运动,需要安装或更新pynycobot,打开电脑终端,执行下面指令进行安装或更新pymycobot
pip install pymycobot --upgrade
3 准备工作
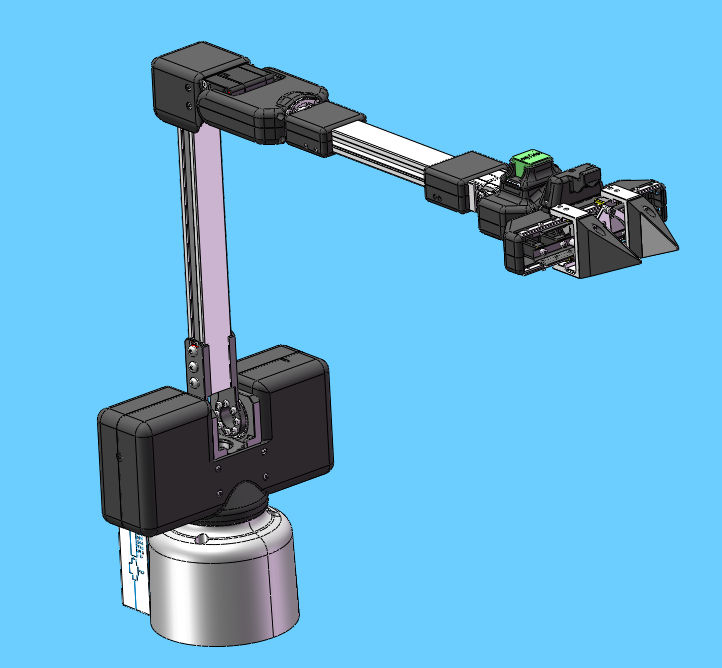
在机械臂接入24V前,先手动将机械臂调整到下图姿态,再依次接入24V电源和通信数据线,机械臂周围不要有杂物,避免发生碰撞
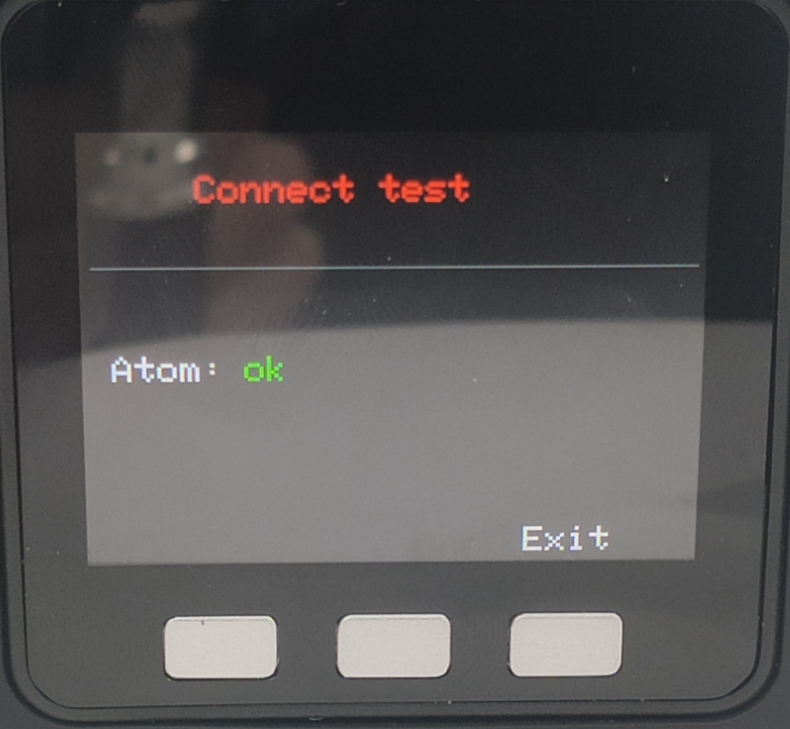
确保底座屏幕显示ok
4 键盘控制
运行下面程序后,机械臂会先移动到一个初始位置,之后会在终端打印按键提示信息,根据终端信息按下对应按键即可控制机器人运动

import threading
from pymycobot import MyArmMControl, utils
import keyboard
import time
m = MyArmMControl(utils.get_port_list()[0],1000000)
def init():
# 设置初始角度
m.write_angles([-10.19, 8.62, 30.65, 2.19, 50.53, -4.83], 100)
time.sleep(1)
m.set_gripper_state(0,100)
time.sleep(1)
# 用于键盘输入检测的函数
def keyborad_ctrl():
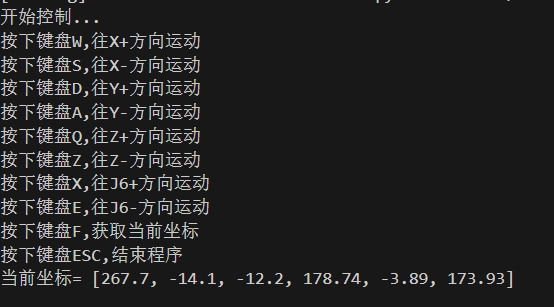
print("开始控制...")
print("按下键盘W,往X+方向运动")
print("按下键盘S,往X-方向运动")
print("按下键盘D,往Y+方向运动")
print("按下键盘A,往Y-方向运动")
print("按下键盘Q,往Z+方向运动")
print("按下键盘Z,往Z-方向运动")
print("按下键盘X,往J6+方向运动")
print("按下键盘E,往J6-方向运动")
print("按下键盘F,获取当前坐标")
print("按下键盘ESC,结束程序")
blocked_keys = ['w', 'a', 's', 'd', 'q', 'z','f','e','x']
for key in blocked_keys:
keyboard.block_key(key)
key_processed = {
'w': False,
'a': False,
's': False,
'd': False,
'q': False,
'z': False,
'f':False,
'e': False,
'x':False,
}
else_executed = False
try:
while True:
if keyboard.is_pressed('esc'):
print("退出控制...")
break
for key in blocked_keys:
if keyboard.is_pressed(key) and not key_processed[key]:
threading.Thread(target=handle_key, args=(key,)).start()
key_processed[key] = True
else_executed = False
if all(not keyboard.is_pressed(key) for key in blocked_keys) and not else_executed:
m.stop()
else_executed = True
for key in key_processed:
if not keyboard.is_pressed(key):
key_processed[key] = False
time.sleep(0.01)
finally:
keyboard.unhook_all()
def handle_key(key):
if key == 'w':
m.jog_coord(1, 1, 60)
elif key == 'a':
m.jog_coord(2, 0, 60)
elif key == 'd':
m.jog_coord(2, 1, 60)
elif key == 's':
m.jog_coord(1, 0, 60)
elif key == 'q':
m.jog_coord(3, 1, 60)
elif key == 'z':
m.jog_coord(3, 0, 60)
elif key == 'e':
m.jog_angle(6,0,50)
elif key == 'x':
m.jog_angle(6,1,50)
elif key == 'f':
print("当前坐标=",m.get_coords())
if __name__ == "__main__":
init()
keyborad_ctrl()
当控制机器人到达目标点后,记录下当前坐标,再关闭程序
5 案例复现
from pymycobot import MyArmMControl, utils
import time
init_angles=[-10.19, 8.62, 30.65, 2.19, 50.53, -4.83]#初始位置的6个关节角度
target_point=[277.7, -14.6, -7.5, 178.74, -2.04, 174.17]#抓取目标的坐标位置
m = MyArmMControl(utils.get_port_list()[0],1000000)
if __name__=="__main__":
m.set_gripper_state(0,100)#先张开夹爪
time.sleep(1)
m.write_angles(init_angles,100)#运动初始位置
time.sleep(2)
m.write_coords([target_point[0],target_point[1],target_point[2]+50,target_point[3],target_point[4],target_point[5]],100,1)#运动到抓取点上方50mm
time.sleep(2)
m.write_coords([target_point[0],target_point[1],target_point[2],target_point[3],target_point[4],target_point[5]],100,1)#运动到抓取点
time.sleep(2)
m.set_gripper_state(1,100)#夹爪闭合
time.sleep(1)
m.write_coords([target_point[0],target_point[1],target_point[2]+50,target_point[3],target_point[4],target_point[5]],100,1)#运动到抓取点上方50mm
time.sleep(2)
m.write_coords([target_point[0],target_point[1]+100,target_point[2]+50,target_point[3],target_point[4],target_point[5]],100,1)#运动到放置点上方50mm
time.sleep(2)
m.write_coords([target_point[0],target_point[1]+100,target_point[2],target_point[3],target_point[4],target_point[5]],100,1)#运动到放置点
time.sleep(2)
m.set_gripper_state(0,100)#夹爪张开
time.sleep(1)
m.write_coords([target_point[0],target_point[1]+100,target_point[2]+50,target_point[3],target_point[4],target_point[5]],100,1)#运动到放置点上方50mm
time.sleep(2)
6 效果展示