1 产品标准清单
1.1 产品列表图片
1.2 产品标准清单对照表
| 序列号 | 产品 |
|---|---|
| 1 | myArm Master 750 机械臂 |
| 2 | 产品套件,包括 USB-Type C、跳线、M6*35、杯形六角头、全螺纹不锈钢螺钉 |
| 3 | DC24V 直流电源 |
| 4 | 固定底板 |
| 5 | G 型夹 |
| 6 | 产品合格证 |
| 7 | 急停按钮 |
注: 包装箱到位后,请确认机器人包装完好无损。如有损坏,请及时联系物流公司和您所在地区的供应商。开箱后,请根据物品清单检查箱内的实际物品。
2 产品开箱指南
2.1 产品开箱图文引导
为什么需要按照步骤拆卸产品
在本节中,我们强烈建议按照指定步骤拆卸产品。这不仅有助于确保产品在运输过程中不受损害,还能将意外故障的风险降至最低。请仔细阅读以下图解指南,以确保您的产品在开箱过程中的安全。
- 1 检查包装箱是否损坏。如有损坏,请及时联系物流公司和您所在地区的供应商。
- 2 打开包装盒,取出产品宣传册、海绵包装盖、myArm 机器人手臂、配套电源、急停开关、平板底座和附件包。
- 3 确保每一步都完成后再进行下一步,以防止不必要的损坏或遗漏。
注: 取出产品后,请仔细检查每件物品的外观。请对照物品清单检查包装箱中的实际物品。
2.2 产品开箱视频引导
3 结构安装和固定
myArm 重 3.2 千克。由于重心会随着机器人在使用过程中的移动而发生变化,因此要求机器人一开始就固定在一个坚固的底座上。固定底座或移动底座均可。
3.1 图文引导
基本接口尺寸
- 底座固定孔是机器人与其他底座或平面之间的接口。具体孔径如下图所示。有 4 个直径为 4.5 毫米的沉孔,可用 M6 螺栓固定。
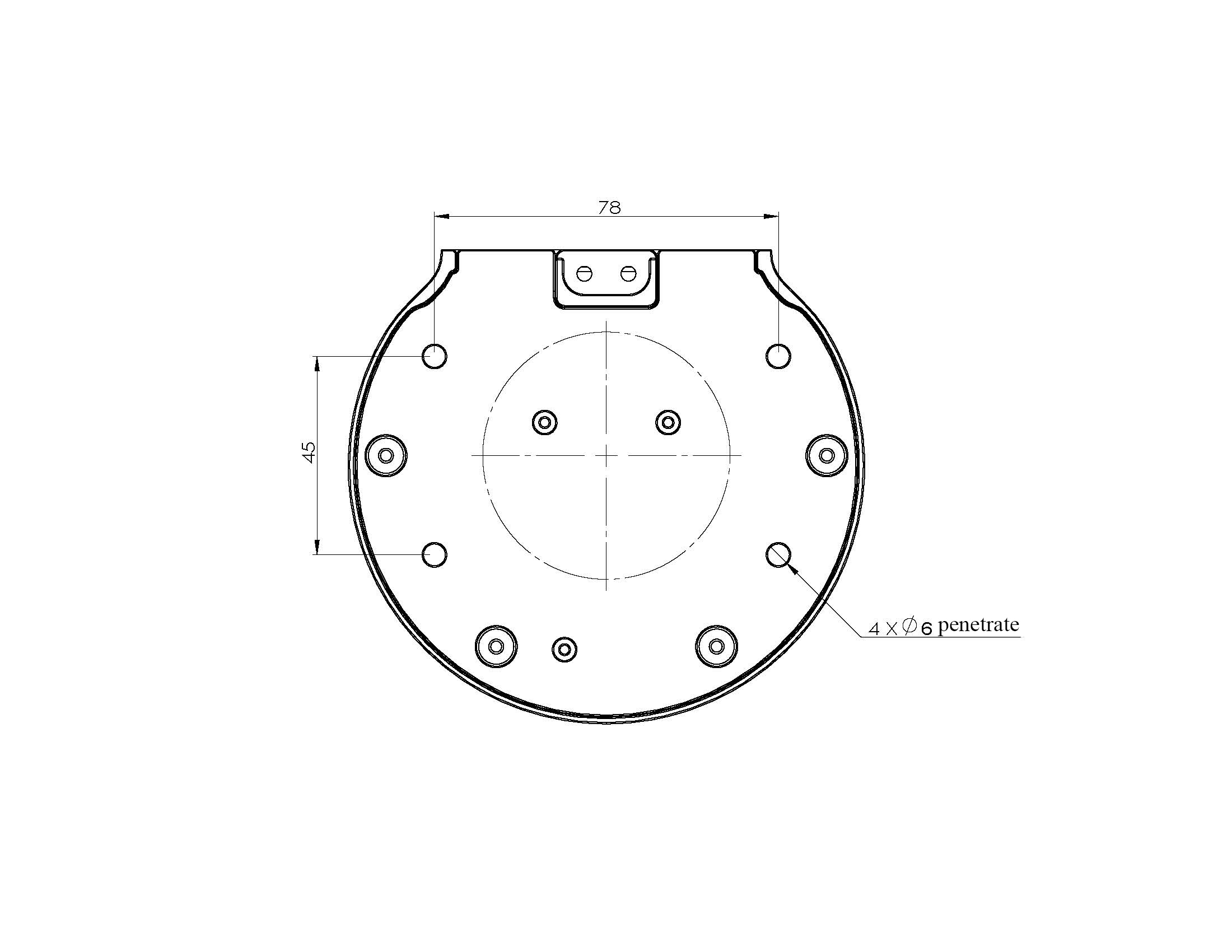
- 末端安装有法兰,可与乐高组件孔和螺纹孔兼容。安装前请确保固定底座上有相应的螺纹孔。
安装前,请确认:
- 环境条件符合上文第 2.2.4.3.1 节所列要求。
- 安装位置不小于机器人的工作范围,并有足够的安装、使用、维护和修理空间。
将底座放在合适的位置。
准备好与安装有关的工具,如螺丝、扳手等。
确认上述步骤后,请将机器人移至底座安装台上,调整机器人位置,并将机器人底座的固定孔与底座安装台上的孔对齐。对齐孔位后,将螺钉对准孔位并拧紧。
注意: 在底座安装台上调整机器人位置时,请勿在底座安装台上直接推拉机器人,以免造成划伤。手动移动机器人时,请勿对机身易损部位施加外力,以免对机器人造成不必要的损坏。
- 安装好机器人后,可以进行线缆连接并使用。
3.2 视频引导
如需了解更多安装细节,请扫描代码观看视频:
资料更新中...
4 外部电缆连接
4.1 图文引导
操作前,请确认您已阅读第 3 章安全说明,以确保操作安全。同时,将电源适配器与机械臂连接,并将机械臂底座固定在桌面上。
myArm 必须使用外部电源供电,以提供足够的电力:
额定电压: 24V
额定电流: 9.4A
插头类型: R7B
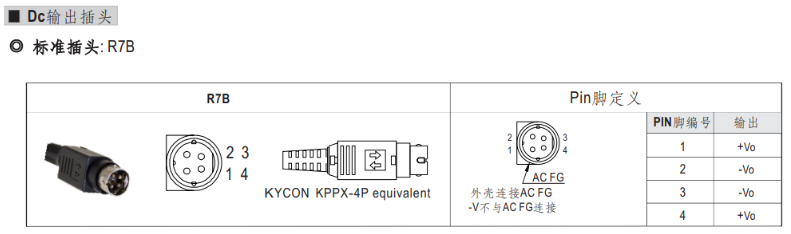
请注意,不能只使用插入 TypeC 供电。 请使用官方认可的电源,以免损坏机械臂。
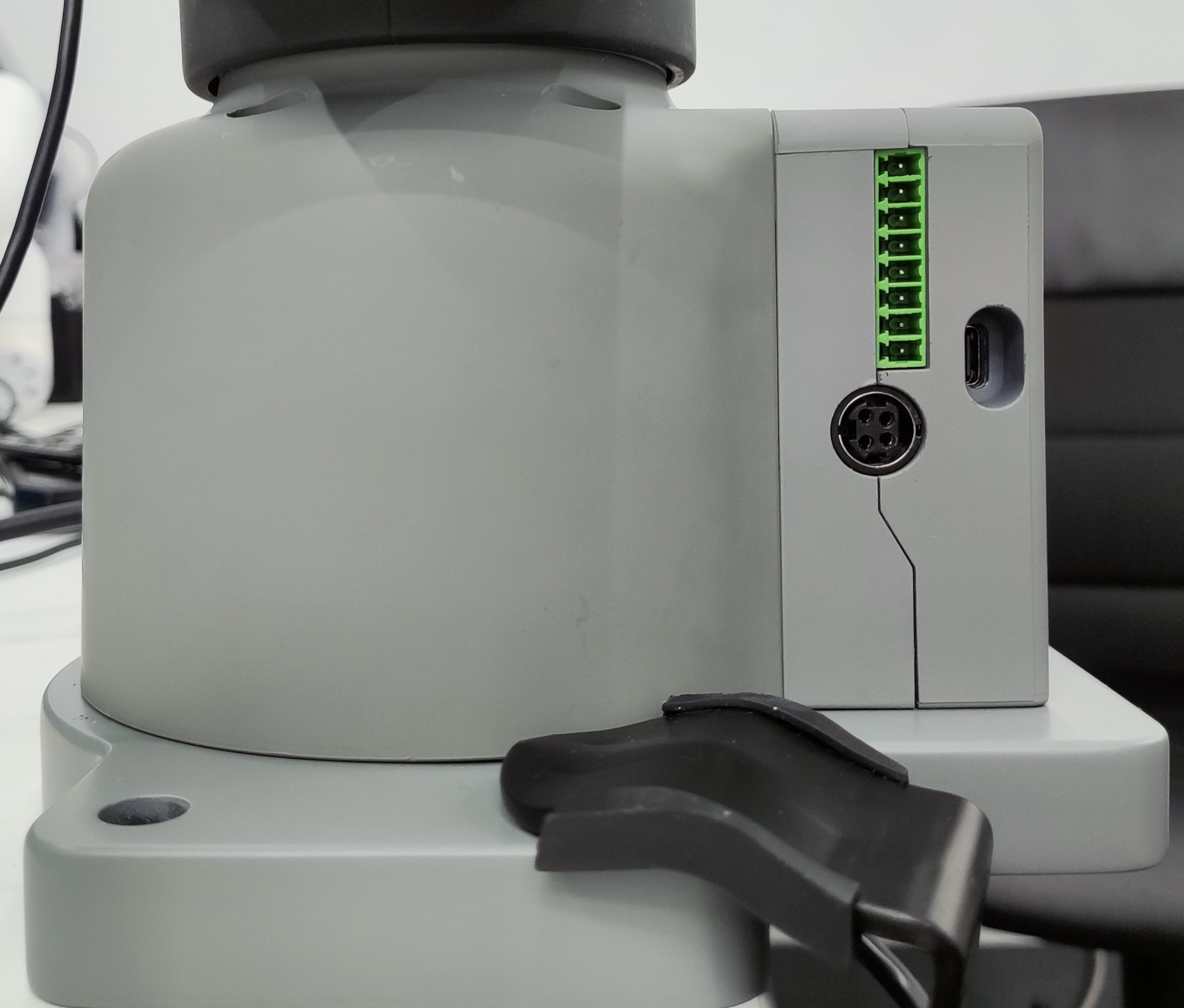
用例图如下图所示:(请仔细对齐用例图,以便进行连接)
Step 1:

Step 2:
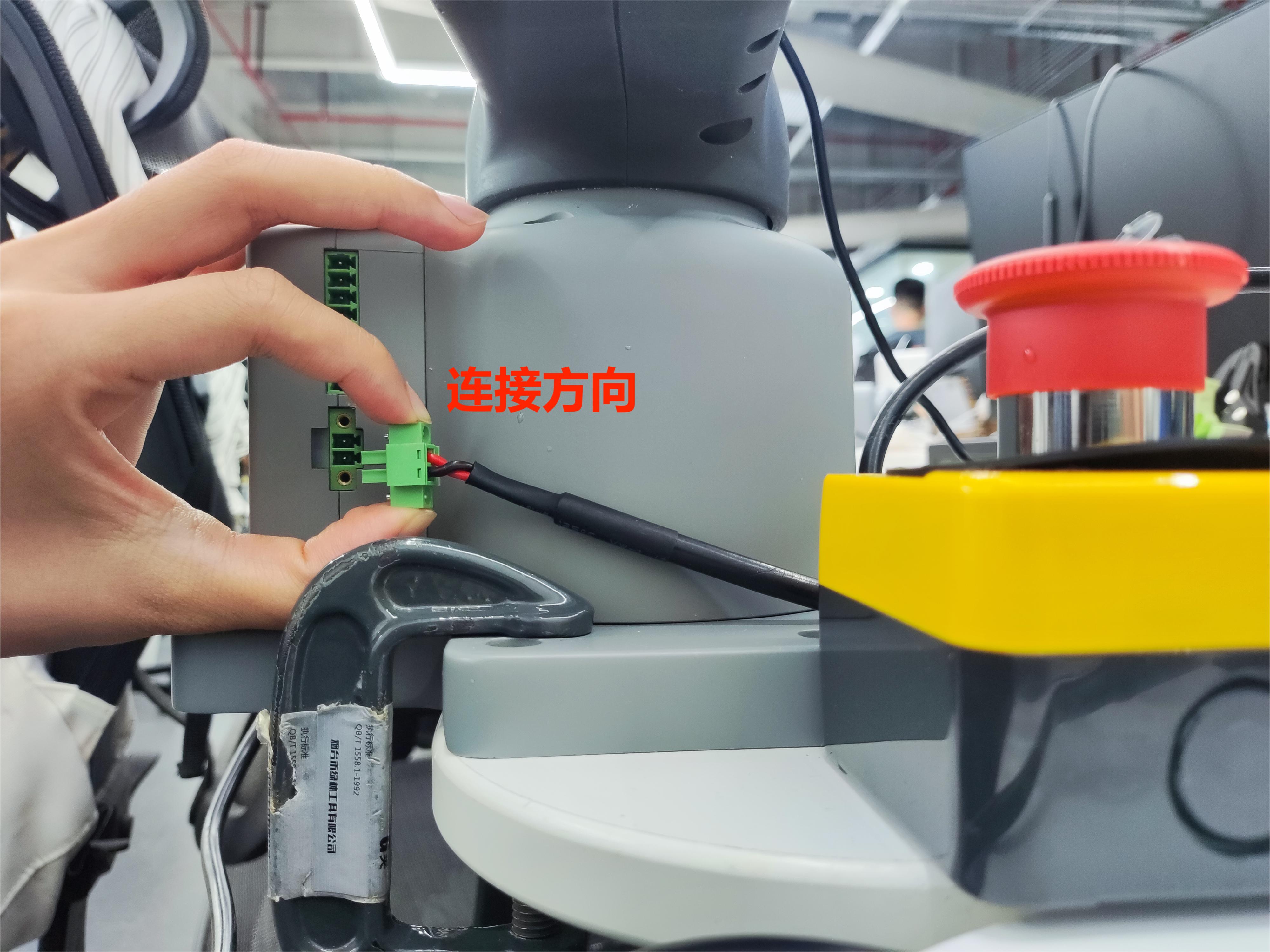
Step 3:

Step 4:
Step 5:

Step 6:

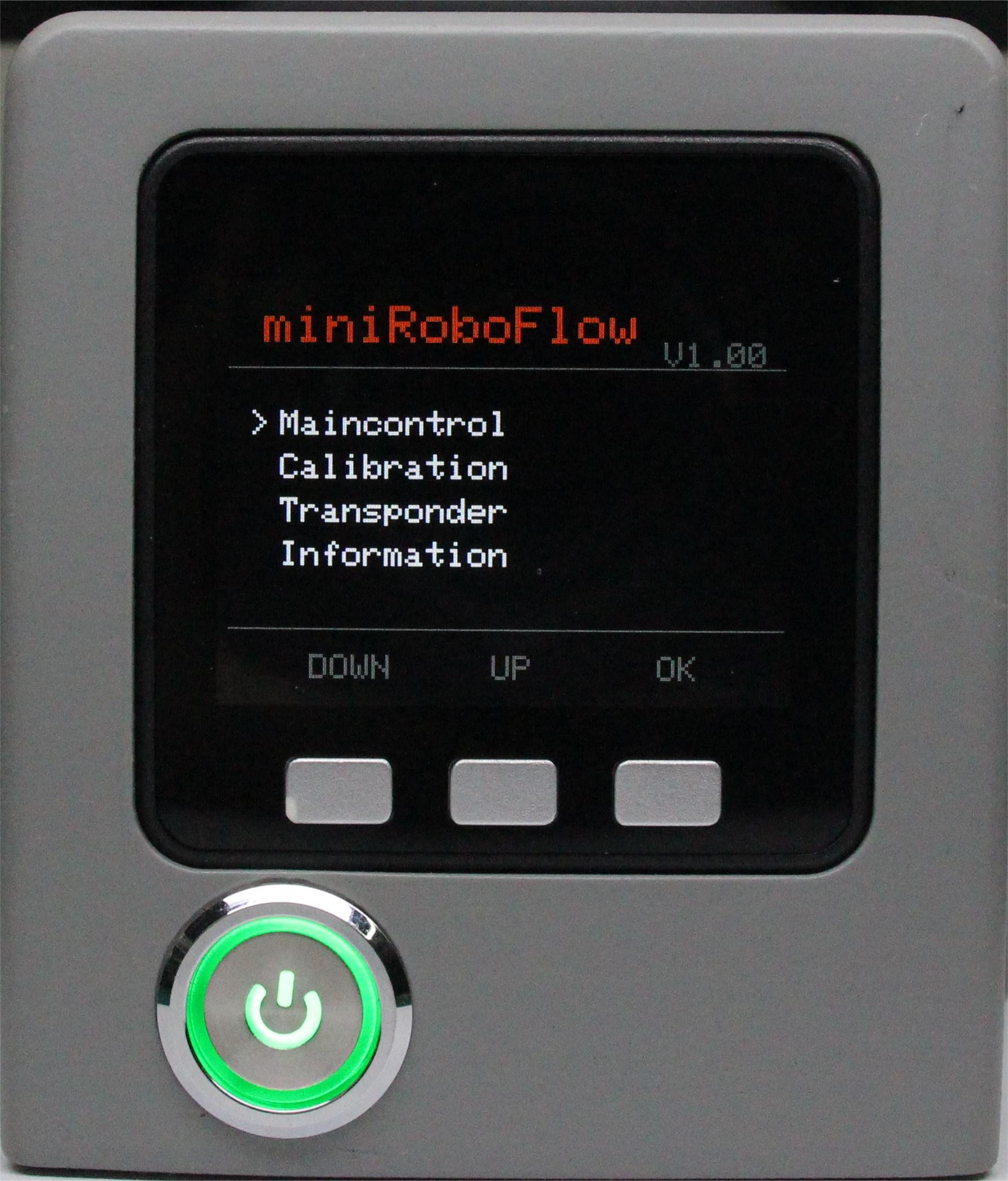
5 开机状态显示
5.1 图文引导
5.1.1 打开电源
确保已连接电源适配器、急停开关和 HDMI 显示器,并按下电源开关 启动按钮(圆形)。
5.1.2 机器启动
启动期间,屏幕出现延时等待界面。
5.1.3 状态展示
显示屏显示系统桌面相关信息。