硬件结构
1 机器人躯干构造
1.1 机器人的关节组成
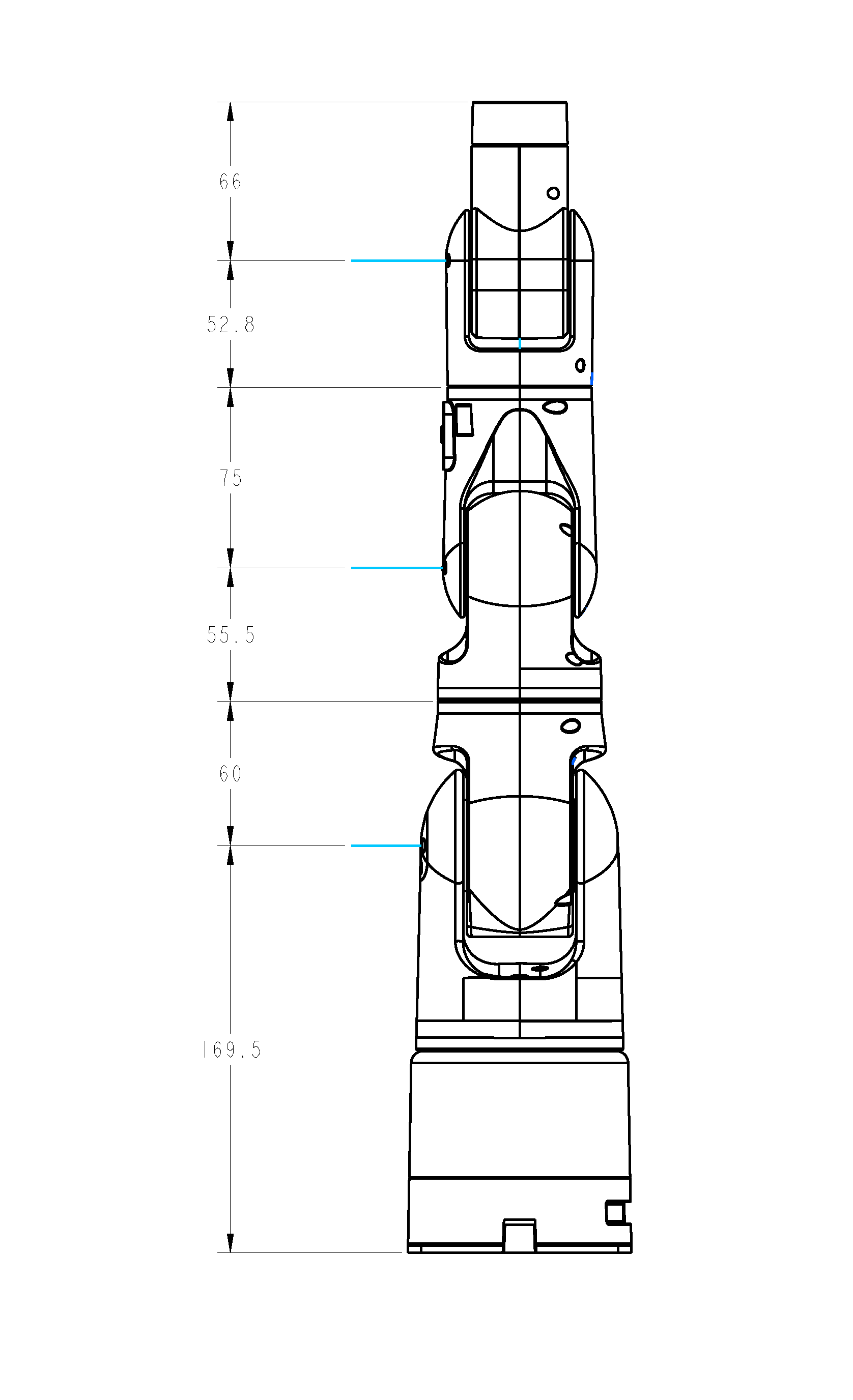
注:7轴为末端旋转关节,无实际长度,图中只标准了1-6关节的长度。关节顺序为从下至上依次为1-7关节。
1.2 工作空间范围
活动空间
myArmd的活动范围是以2轴为圆心,半径为310mm的球形空间:
奇异位置
当六关节为0°时机械臂处于奇异位置
坐标运动推荐运动空间
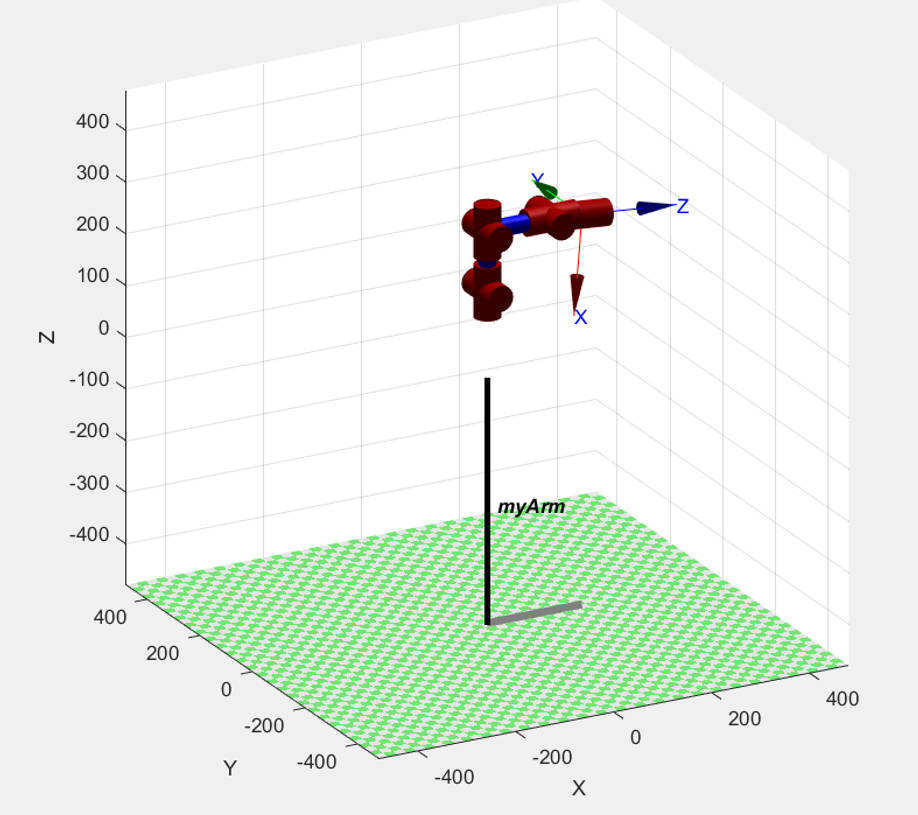
建议以以下姿态进行坐标控制:
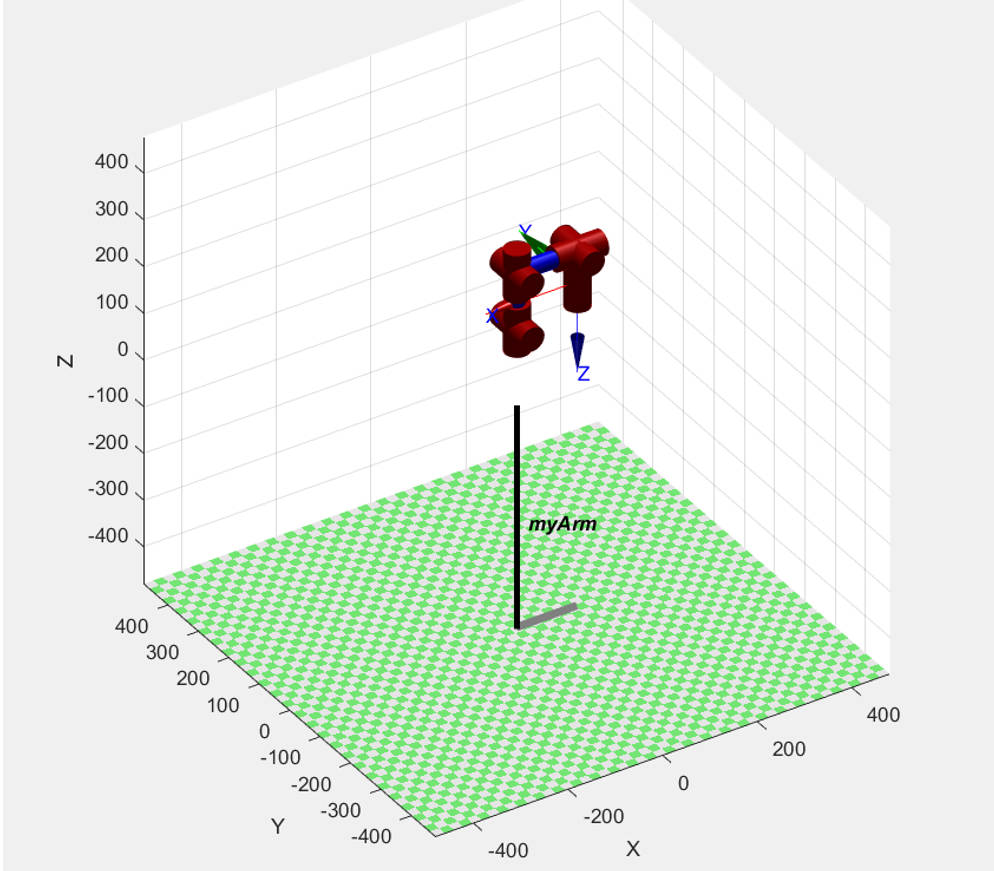
该姿态下的活动空间如下:

该活动空间的横切面如下:
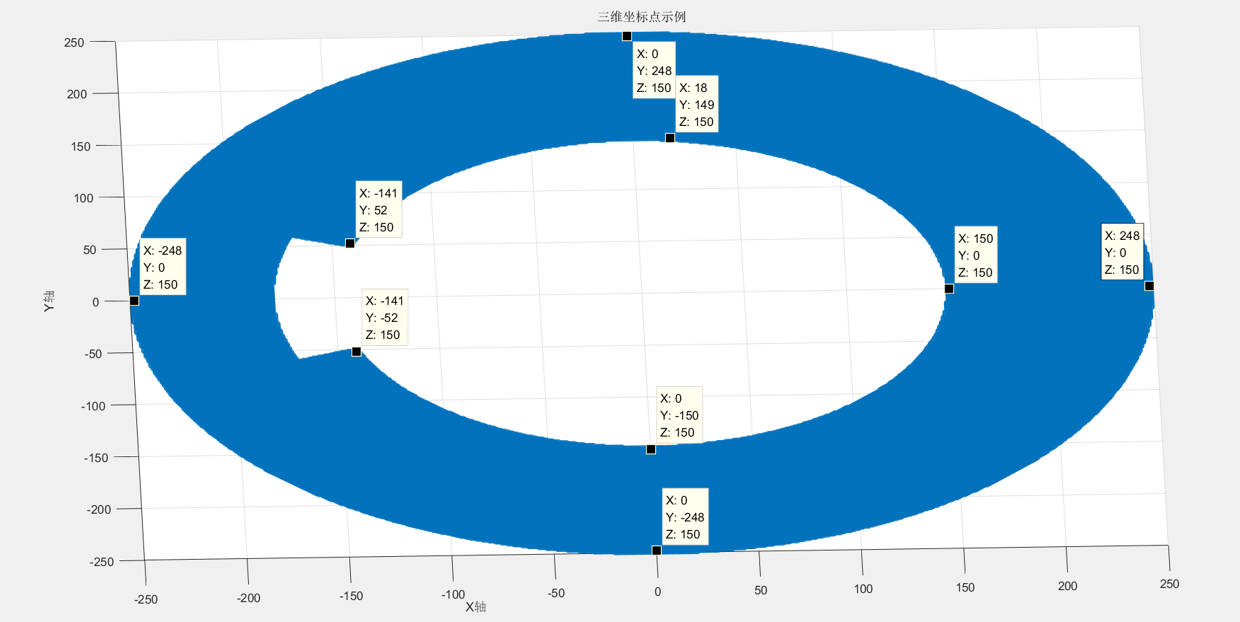
该姿态的坐标运动范围可近似表达为: 150²<x²+y²<250²
1.3 关节活动范围
- 关节限位
| 关节 | 范围 |
|---|---|
| J1 | -160 ~ +160 |
| J2 | -80 ~ +80 |
| J3 | -165 ~ +165 |
| J4 | -100 ~ +80 |
| J5 | -165 ~ +165 |
| J6 | -110 ~ +110 |
| J7 | -165 ~ +165 |
1.4 机器人运动学
运动学模型

DH参数

2 基座和工具接口
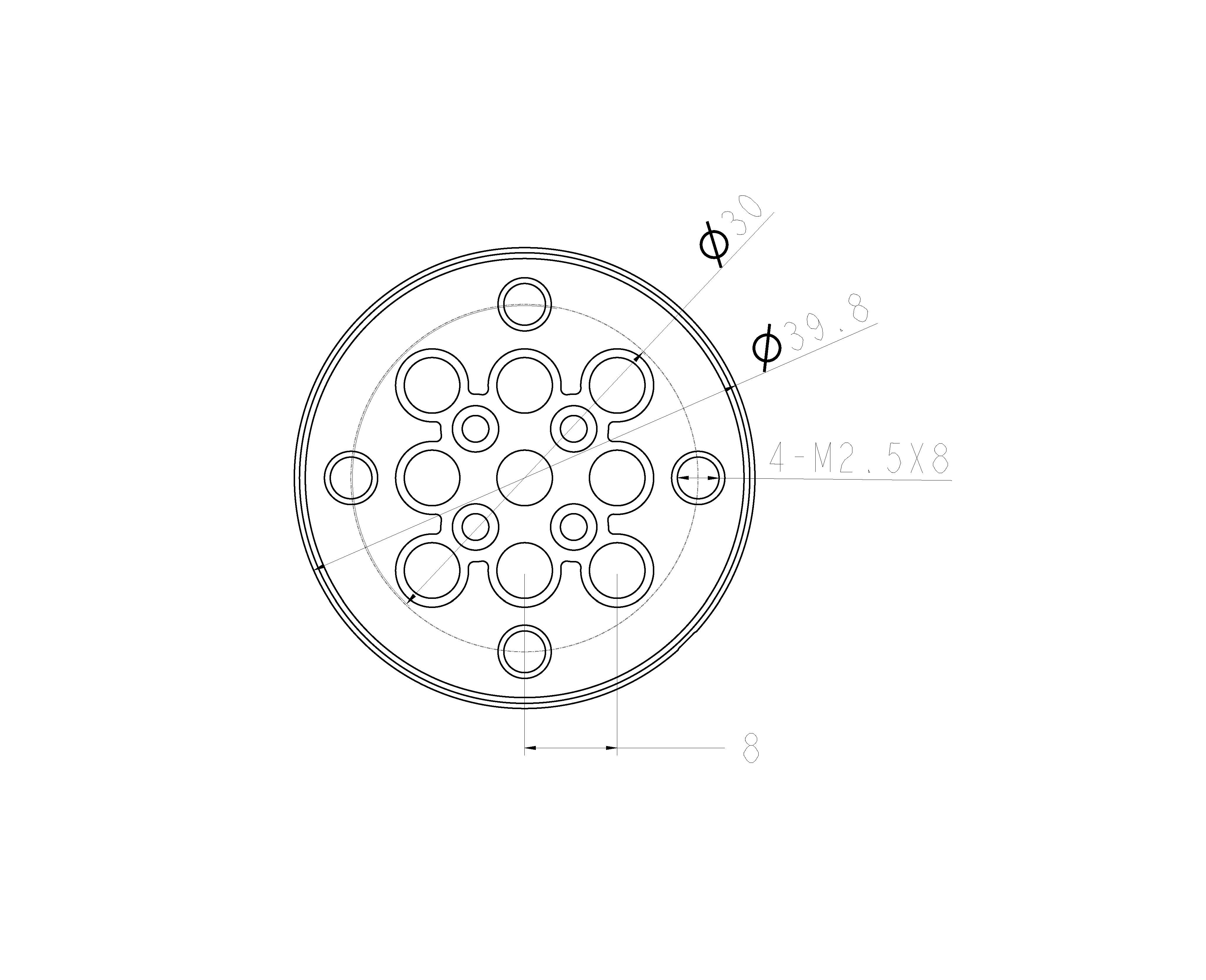
2.1 基座固定接口

底座可以使用多种固定方式进行固定,目前提供了LEGO连接件和螺丝锁定方式,可以搭配G型底座或者大吸盘底座适用。
2.2 工具扩展接口
末端可以使用多种固定方式进行固定,目前提供了LEGO连接件和螺丝锁定方式,可以搭配 myCobot 系列末端配件或者用户DIY的配件使用。
3 使用注意事项
- 外壳材质适用的环境要求
| 工作环境 | 条件 |
|---|---|
| 温度 | 0°C~45°C |
| 相对湿度 | 20%~70% |
| 室内外要求 | 室内 |
| 其他环境要求 | - 避免阳光照射。 - 远离灰尘、油烟、盐分、铁屑等。 - 远离易燃性、腐蚀性液体与气体。 - 不得与水接触。 - 不传递冲击与振动等。 - 远离强电磁干扰源。 |