机械臂电气接口
1 底座电气接口
1.1 底座介绍
A. 底座正前方接口和开关如图 2-3 所示:  图 2-3 底座图
图 2-3 底座图
B. 底座左侧接口如图 2-4 所示: 
图 2-4 底座左侧图
①:机械臂充电口:使用DC电源插座,外径6.5mm,内径2.0mm;可使用厂家配备的8.4V 5A DC电源适配器给机械臂进行供电。
②:底部引脚口:见下一段表格
③:USB2.0和USB3.0接口:以串口总线标准2.0和3.0进行数据连接的接口;用户可以使用USB接口拷贝程序文件,也可以使用USB接口连接鼠标、键盘等外设。
④:网口:网络数据连接的端口,用户使用Ethernet接口可以用于PC端与机器人系统的通信交互,也可以用于与其他设备进行以太网通信。
⑤:开关按键:红色为开关,I为开机,O为关机。
⑥:树莓派4B自带USB插口
⑦:显示屏接口:HDMI接口,该接口为HDMI D型接口,连接显示器.HDMI接口2存在优先级,推荐使用HDMI接口1。
⑧:音箱、耳机插口
1.2 底座接口说明
注:功能接口组均为2.54mm杜邦接口,外部可使用2.54mm杜邦线;
A. 如下列表格为功能接口各个接口的定义。
| 标签名 | 信号名 | 功能 | 备注 |
|---|---|---|---|
| 5V | 5V | 电源供电,DC5V | |
| 5V | 5V | 电源供电,DC5V | |
| GND | GND | 主板电源信号地 | |
| NC | NC | -- | 暂不开放 |
| NC | NC | -- | 暂不开放 |
| 18 | GPIO18 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| GND | GND | 主板电源信号地 | |
| 23 | GPIO23 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 24 | GPIO24 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| GND | GND | 主板电源信号地 | |
| 25 | GPIO25 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 08 | GPIO08 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 07 | GPIO07 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 01 | GPIO01 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| GND | GND | 主板电源信号地 | |
| 12 | GPIO12 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| GND | GND | 主板电源信号地 | |
| 16 | GPIO16 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 20 | GPIO20 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 21 | GPIO21 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 3.3 | 3.3V | DC3.3V供电 | |
| NC | NC | -- | 暂不开放 |
| 03 | GPIO03 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 04 | GPIO04 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| GND | GND | 主板电源信号地 | |
| 17 | GPIO17 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 27 | GPIO27 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 22 | GPIO22 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 3.3 | 3.3V | DC3.3V供电 | |
| 10 | GPIO10 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 09 | GPIO09 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 11 | GPIO11 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| GND | GND | 主板电源信号地 | |
| 00 | GPIO00 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 05 | GPIO05 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 06 | GPIO06 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 13 | GPIO13 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 19 | GPIO19 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 26 | GPIO26 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| GND | GND | 主板电源信号地 |
说明:关于功能接口的其他功能表如图 2-5 所示,使用其他功能的情况下,IO功能不可用:

图 2-5
B. 电源DC接口:使用DC电源插座,外径6.5mm,内径2.0mm;可使用厂家配备的8V-12V,5A DC电源适配器给mecharm270进行供电。
C. 开关:红色为开关,I为开机,O为关机。
D. USB2.0接口:以串口总线标准2.0进行数据连接的接口;用户可以使用USB接口拷贝程序文件,也可以使用USB接口连接鼠标、键盘等外设。
E. USB3.0接口(蓝色):以串口总线标准3.0进行数据连接的接口;用户可以使用USB接口拷贝程序文件,也可以使用USB接口连接鼠标、键盘等外设。
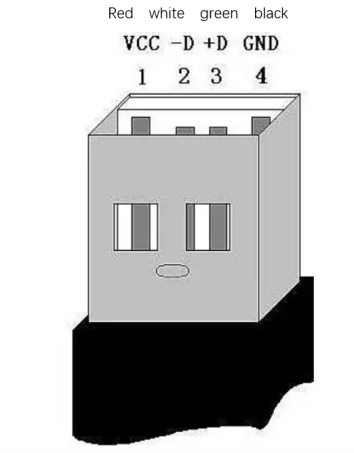
图2-6 USB接口定义图
F. 以太网接口:(如图2-7)网络数据连接的端口,用户使用Ethernet接口可以用于PC端与机器人系统的通信交互,也可以用于与其他设备进行以太网通信。
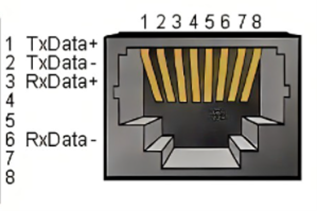
图2-7 网络接口定义图
G. HDMI接口:该接口为HDMI D型接如图2-8,2-9),连接显示器.HDMI接口2存在优先级,推荐使用HDMI接口1。
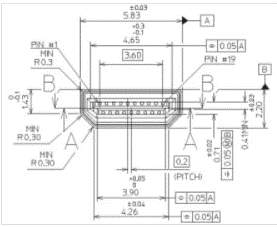
图2-8 HDMI D型接口1
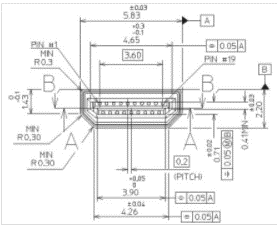
图2-9 HDMI D型接口2
H. Type C接口:可用于和PC端连接通讯。
I. SD卡插口:可插拔SD卡,SD卡内部存储系统,SD卡大小为32mm×24mm×2.1mm。
2 机械臂末端电气接口
2.1 机械臂末端介绍
A. 机械臂末端侧面接口示意如图2-1所示:

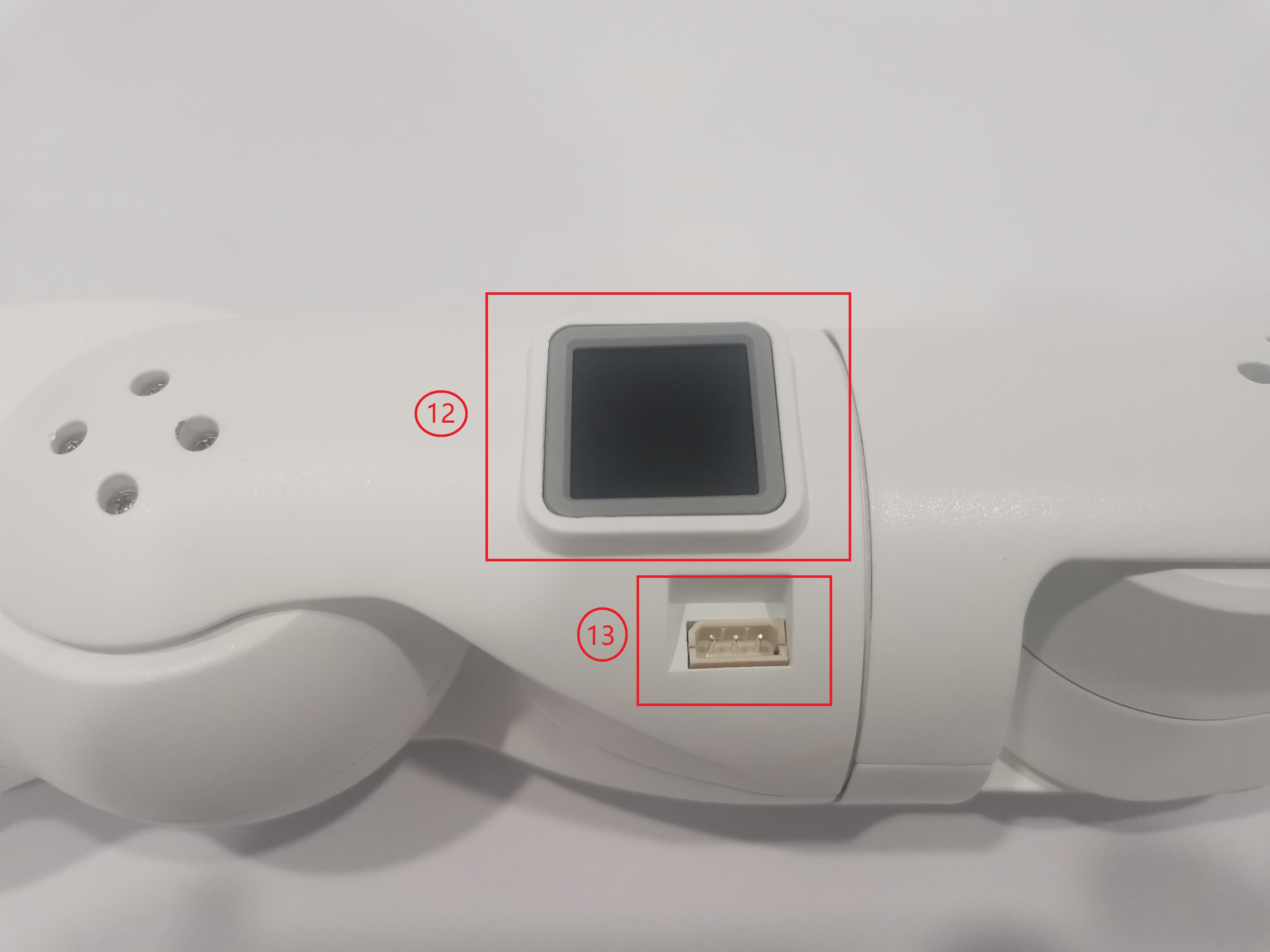
图2-1机械臂末端
⑨:末端IO接口
⑩:末端Grove接口
⑾:Type C接口
⑿:末端Atom
⒀:舵机接口
2.2 末端接口说明
A. 如表2-1为末端IO口的定义。
| 标签名 | 信号名 | 功能 | 备注 |
|---|---|---|---|
| 5V0 | 5V | 5V电源 | |
| GND | GND | 主板电源信号地 | |
| 3V3 | 3V3 | 3.3V电源 | |
| G22 | G22 | 3.3V-OUT-PIN输出/3.3V-INT输入 | |
| G19 | G19 | 3.3V-OUT-PIN输出/3.3V-INT输入 | |
| G23 | G23 | 3.3V-OUT-PIN输出/3.3V-INT输入 | |
| G33 | G33 | 3.3V-OUT-PIN输出/3.3V-INT输入 |
表2-1 末端IO口
B. 末端Grove接口:Grove接口4定义如图2-2所示
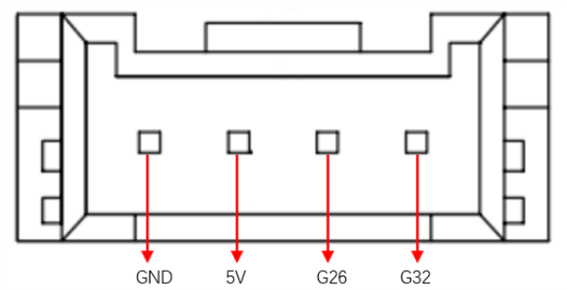
图2-2 末端Grove接口
C. Type C接口:可用于和PC端连接通讯,更新固件使用。
D. Atom:用于 5X5 RGB LED(G27)显示和按键功能(G39)
E. 舵机接口:用于末端拓展夹爪时使用,当前支持配套的自适应夹爪使用。