系统基础功能说明
机器人系统介绍
系统简介
Ubuntu是个人桌面操作系统中使用最广泛的linux操作系统。对于初学者来说,熟悉linux环境或一些嵌入式硬件操作系统是一个很好的选择。

系统功能简介
- myBlockly:图形化编程软件,可直接通过拖拽积木组成运行代码,控制机械臂
- ROS2 Shell:直接进入编译好的ROS2环境,可直接输入对应指令,运行对应的可直接运行ROS2代码
- Github-ElephantRobotics:大象机器人官方开源代码仓库
- Home-ElephantRobotics:大象机器人官网主页
- UserManual - CN/EN:机器使用手册,包含所有关于机械臂控制的内容
- AIKits_UI:AIKits高级套件的UI软件,涵盖目标检测、颜色识别、形状识别、二维码识别等
- TestTool:生产测试工具
- Enter_flashmode:一键进入刷机模式
系统密码说明
开机账户密码 & SSH 连接密码 & 管理员账户密码
- 统一为:Elephant
如何定义新的密码
更改账户密码
使用快捷键
ctrl + alt + T打开终端输入
passwd进行账户密码修改输入新密码两次即可
更改SSH连接密码
- SSH远程连接输入的就是管理员账户密码,无需单独修改
更改管理员账户密码
使用快捷键
ctrl + alt + T打开终端输入
sudo passwd进行账户密码修改输入新密码两次即可
网络配置
以太网连接
将网线插入机械臂以太网口后,系统会自动通过 DHCP 获取 IP 地址。若网络配置和设备正常,系统应能成功建立局域网连接。
WIFI连接
- 打开 "设置";
- 打开 “Wi-Fi” 菜单;
- 点击您要用的网络名称;

- 如果网络受到密码保护,请在出现提示时输入密码并单击连接;
- 当计算机连接到网络过程中,网络图标会发生变化;
- 如果连接成功,图标会变成一个圆点加上弧状条纹。条纹越多表示网络连接越强。越少表示连接越弱而且可能不太稳定。
查看网络 IP 地址
连接有线/无线网络之后,您可以通过以下方式确认网络是否已连接并正常工作:
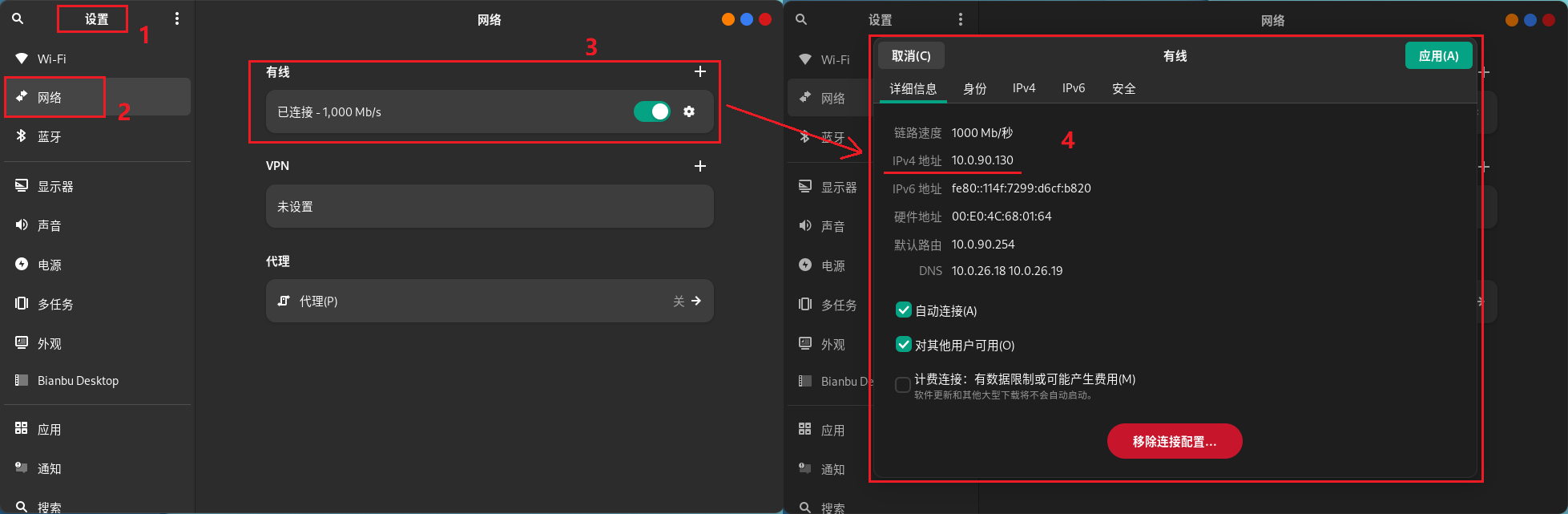
方法一:通过图形界面查看 IP 地址
- 打开 “设置”;
- 打开 “网络” 菜单;
- 找到已连接的有线网卡,点击其 “设置” 按钮;
- 弹出对话框即可查看 IP 地址。
方法二:终端命令
打开Bianbu Robot终端,执行以下命令:
ifconfig
在输出内容中查找 inet 字段,对应的即为 IPv4 地址。 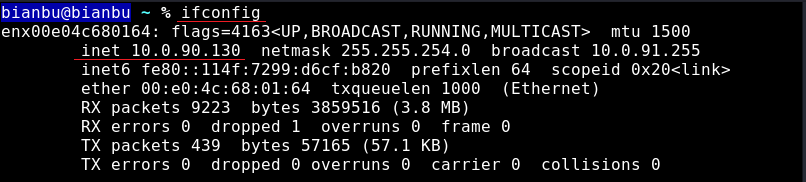
SSH
SSH 是远程访问开发板的主要方式之一,适用于局域网环境。
SSH 服务端
机械臂默认已启用 SSH 服务。可通过以下命令验证服务状态:
systemctl status ssh
若 SSH 服务未启动,可手动启动:
sudo systemctl start ssh
sudo systemctl enable ssh
完成配置后,可通过 PC 使用 SSH 工具远程登录。
SSH 客户端
⚠️ 请确保开发板已成功联网,联网方法详见:网络配置
Windows 客户端
推荐使用 MobaXterm 工具,操作如下:
打开 MobaXterm,点击 "Sessions" → "New Session",选择 SSH。
设置连接参数:
Remote host:开发板 IP 地址(如
192.168.1.100);Specify username:默认用户名为
bianbu;Port:保持默认
22。
点击 OK 发起连接,并输入密码完成登录。
Ubuntu 客户端
在终端中输入以下命令:
ssh er@<remote_ip>
将 <remote_ip> 替换为开发板的实际 IP 地址。首次连接时会提示确认主机指纹,输入 yes 即可。
RDP
- RDP 功能介绍
- 一款远程控制的软件,一般用于远程解决电脑故障或软件调试
- RDP 端口说明
- RDP服务端口号为
3389
- RDP服务端口号为
RDP 服务端
- 打开系统设置

- 导航到“系统->远程桌面”
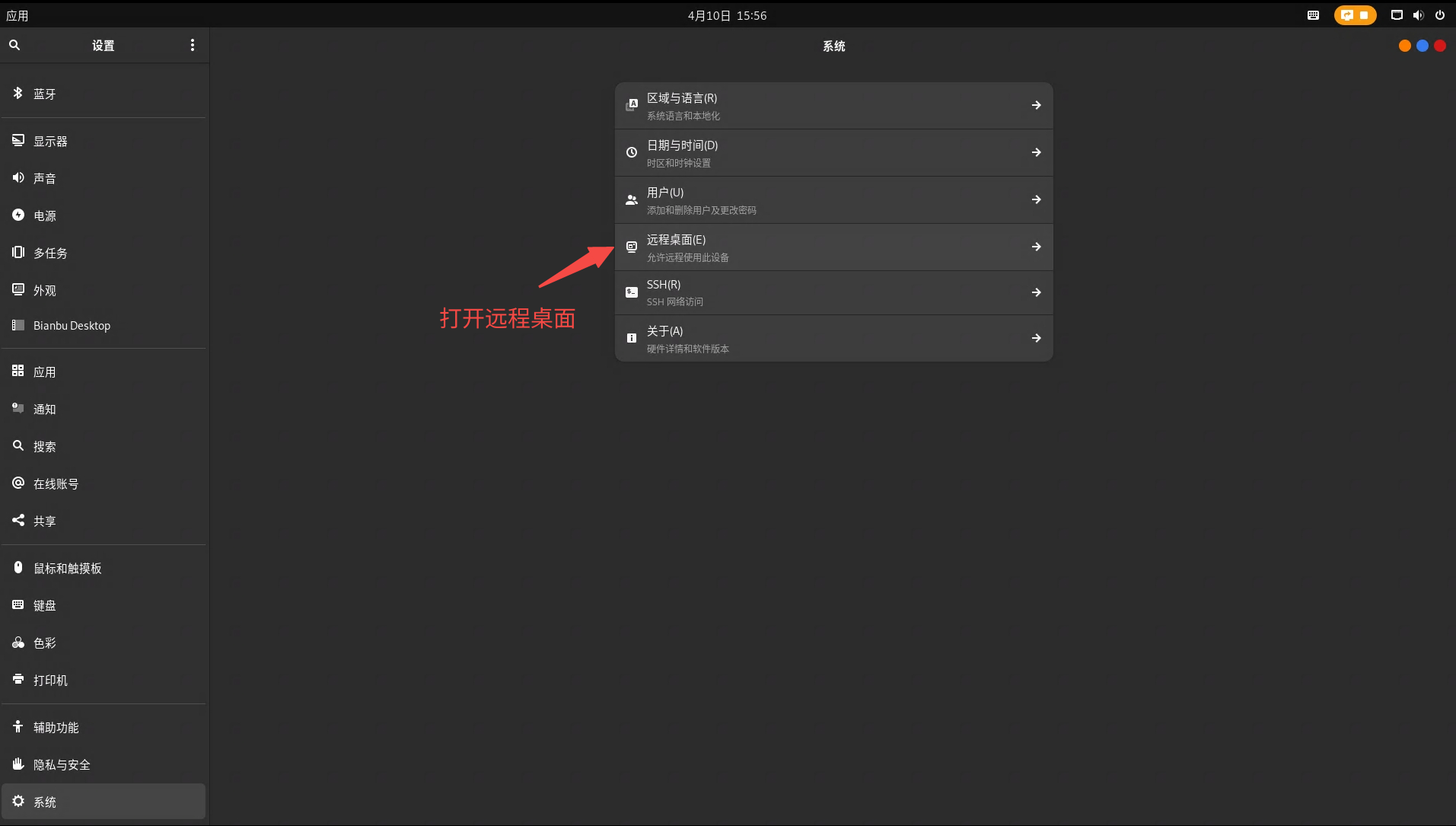
- 打开“桌面共享”和“远程控制”选项
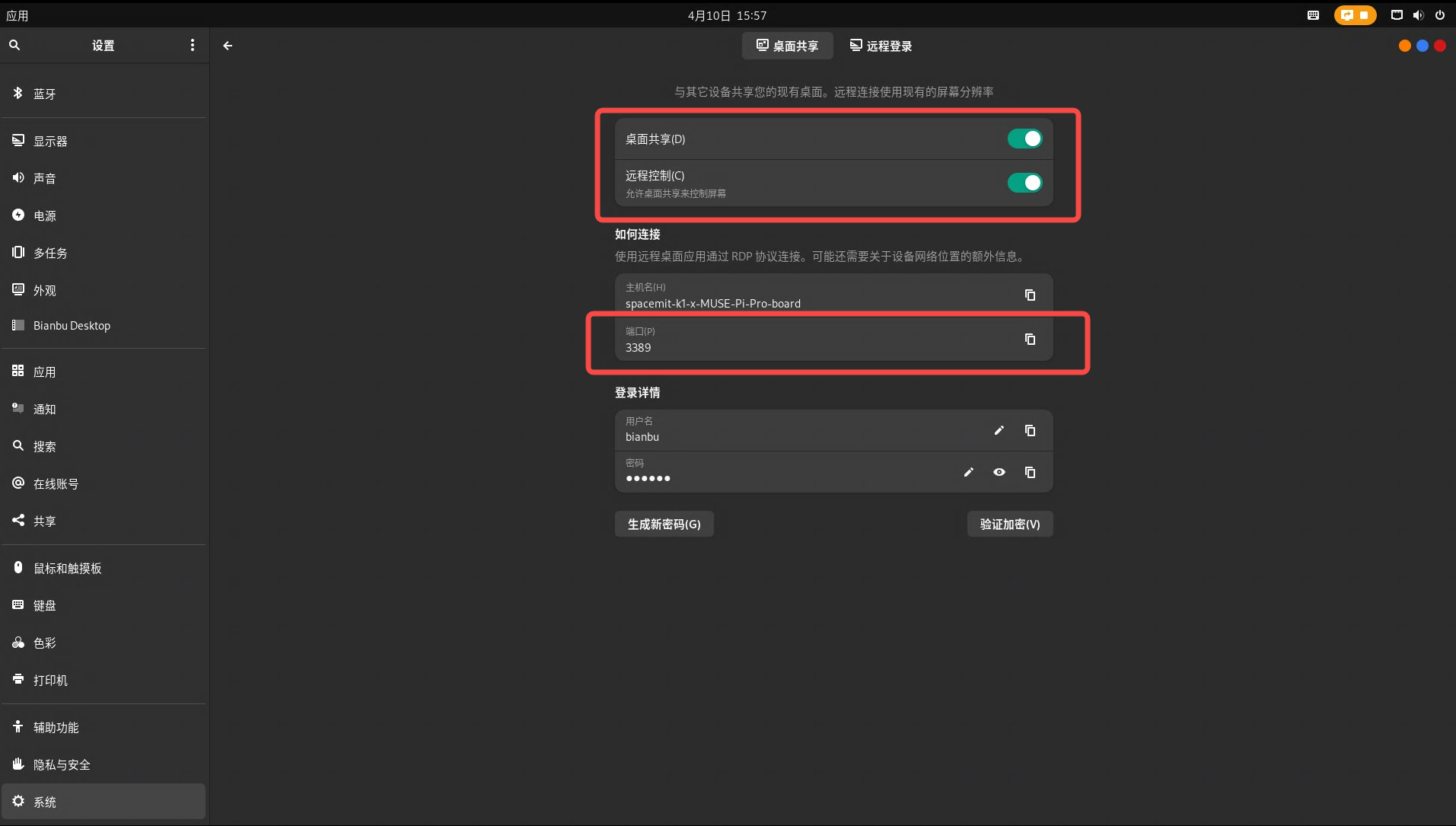
可以重置RDP登录的用户名(默认为er)和密码(默认为Elephant),后续客户端登录需要使用这里的账户。
RDP 客户端
PC可通过开发板的RDP端口访问开发板桌面,支持Windows和Linux登录。
[!NOTE]
在进行远程连接之前,确保开发板已联网,并与PC处于同一局域网。
第一次需要使用HDMI连接屏幕进入系统连接WIFI并获取IP。当不接HDMI显示器时,需要使用HDMI屏幕欺骗器才能登录远程桌面。
Windows客户端
Windows可使用“远程桌面连接”软件来访问开发板,连接时要计算机名称填写remote_ip:port。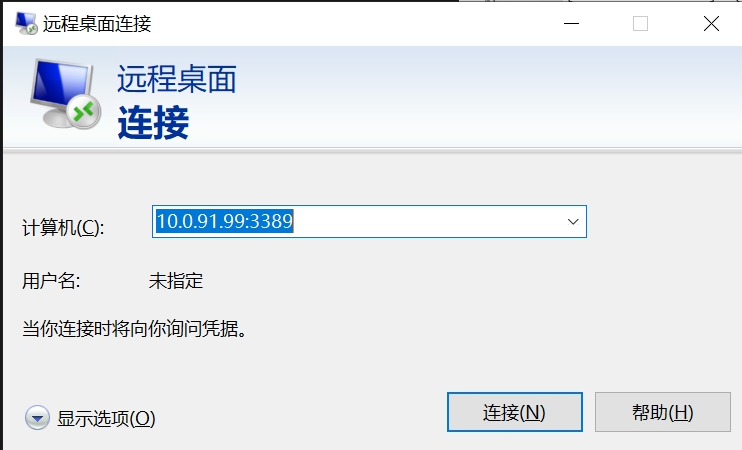
Ubuntu客户端
Ubuntu可使用Remmina软件来访问开发板桌面。
下载Remmina
sudo sudo apt update sudo sudo apt install remmina remmina-plugin-rdp remmina-plugin-vnc remmina-plugin-secret启动Remmina
remmina
输入上述命令之后,会弹出登录界面,选择RDP协议并输入开发板的IP和RDP端口号,点击回车键进行连接。

语言配置
- 打开 “系统设置”;
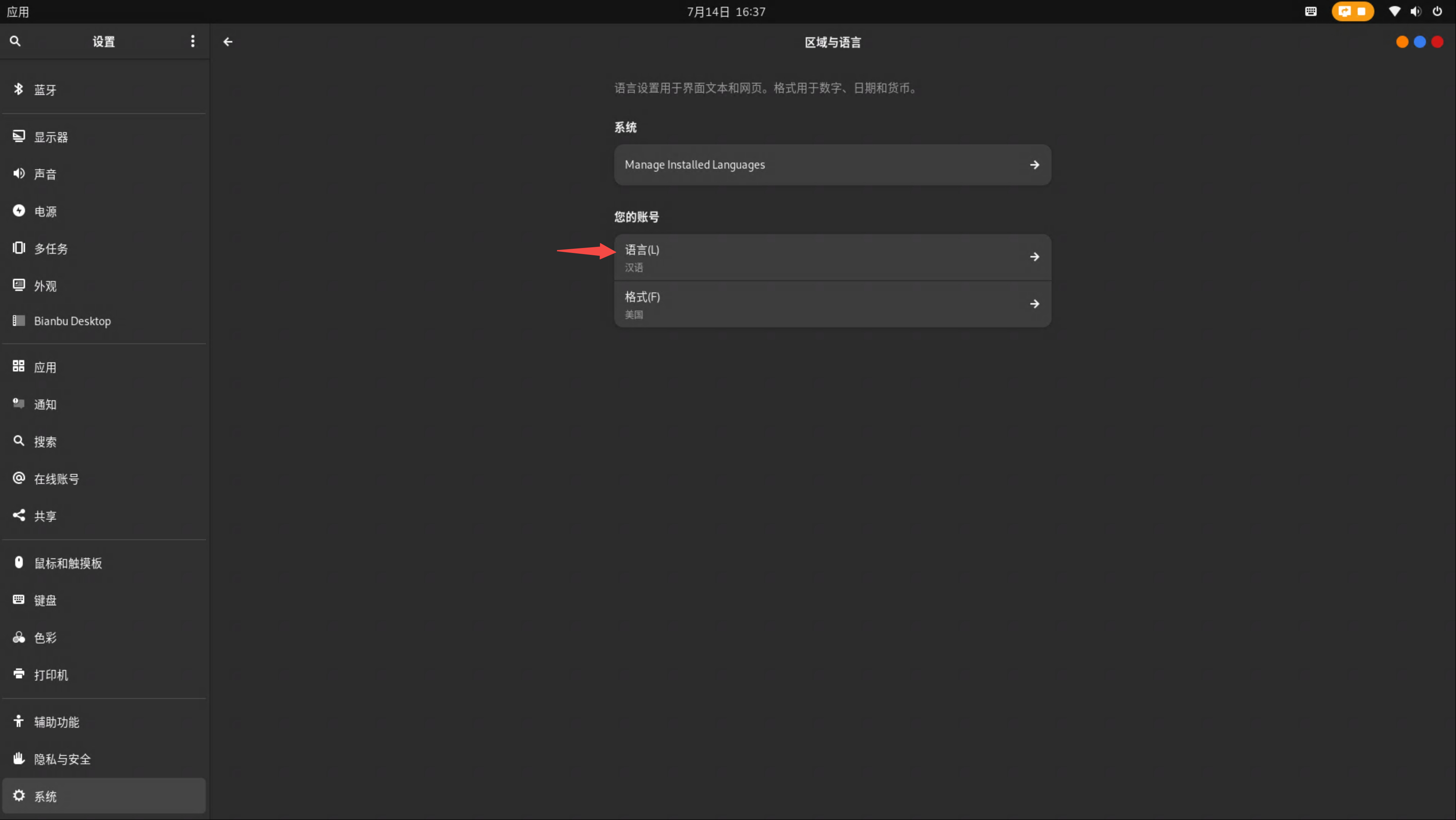
导航到 “系统->区域与语言”
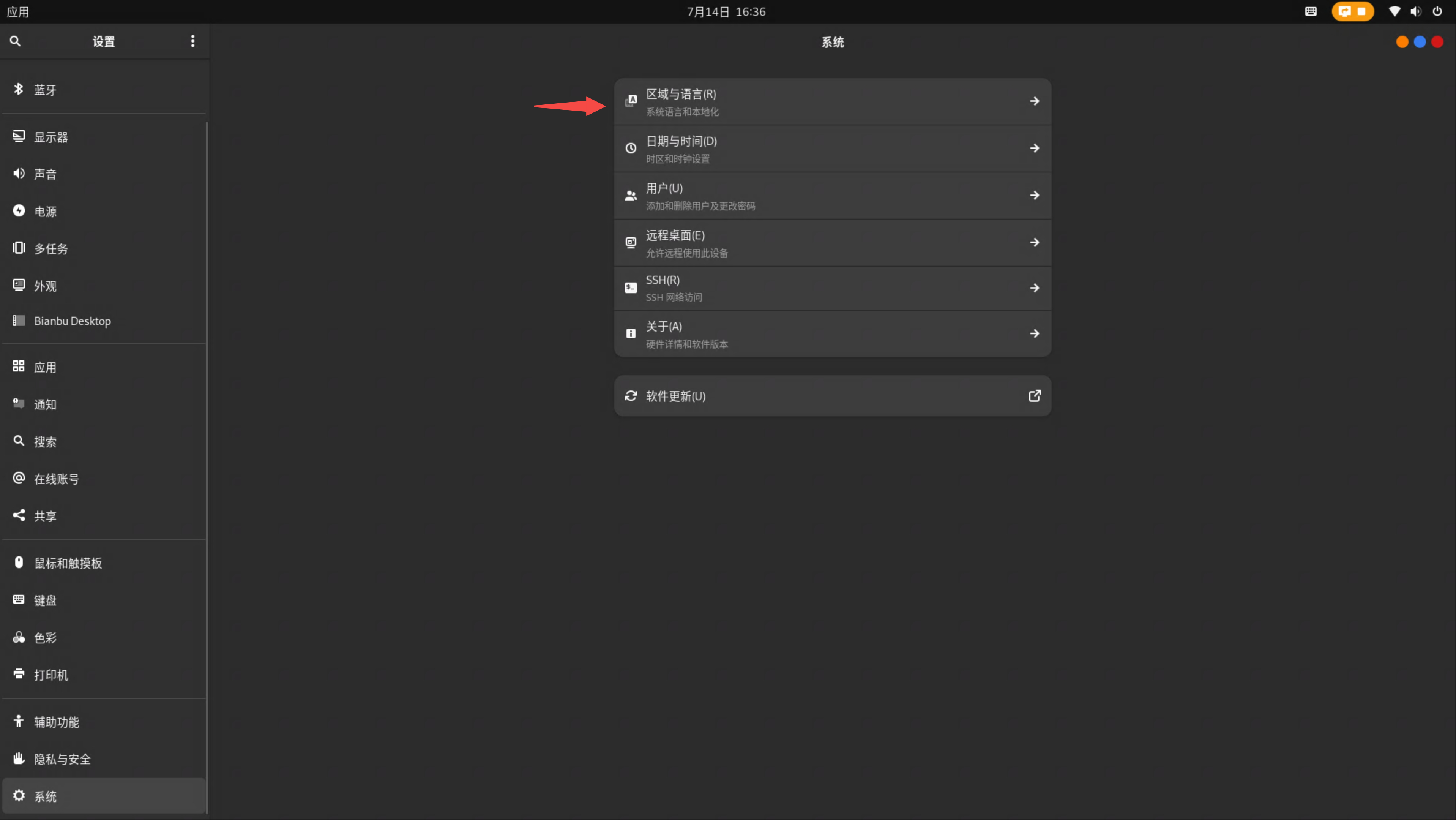
点击 "语言",选择想要切换的语言,切换之后重启系统生效。
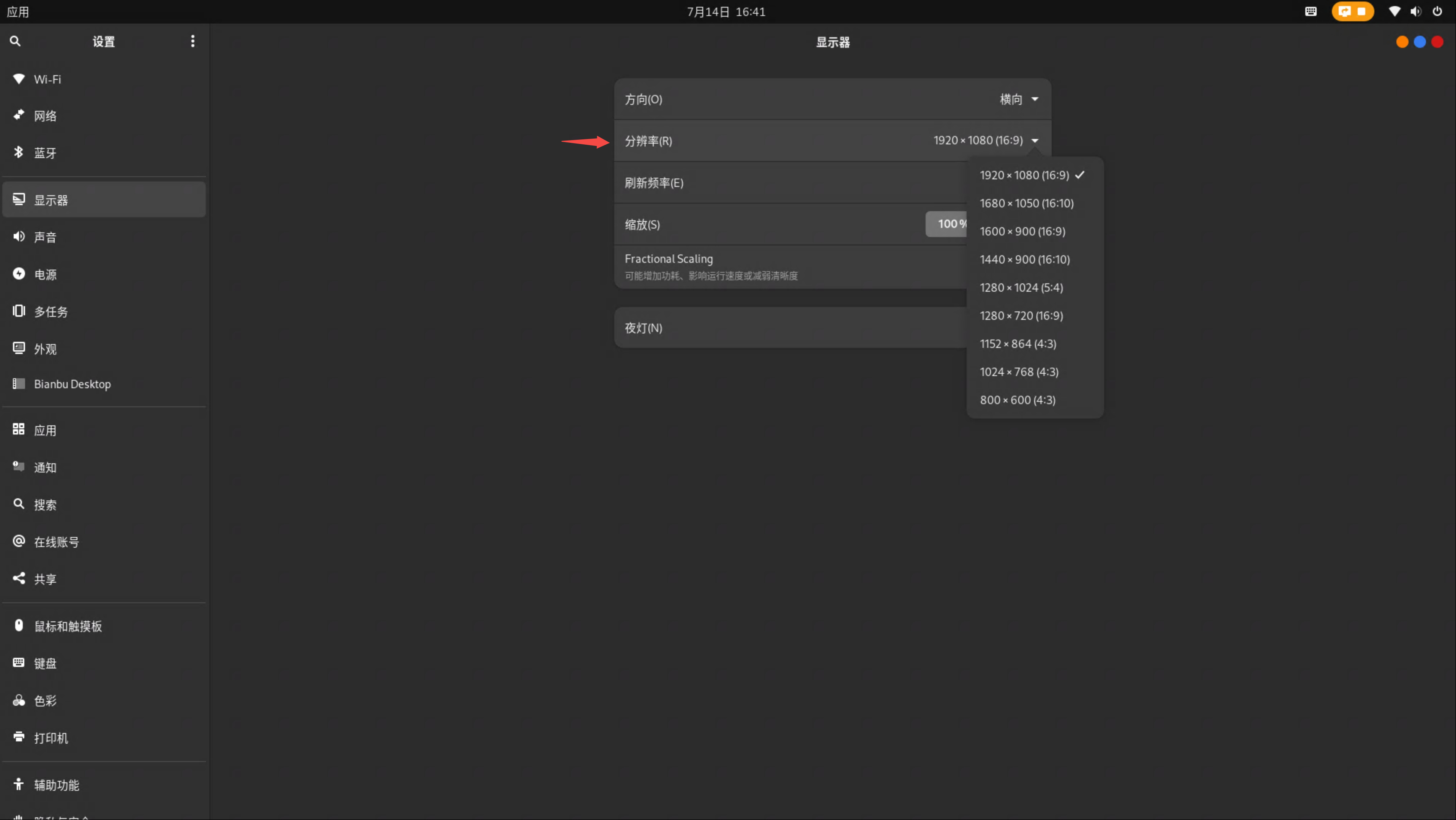
系统分辨率切换
- 打开 “系统设置”;
- 导航到 “显示器->”,点击 “分辨率”,选择目标分辨率。
python
机器人系统python简介
系统内置安装Python3.12 ,无需自行安装
已安装Python依赖:
| Package | Version |
|---|---|
| pymycobot | 3.9.7 |
| pyserial | 3.5 |
| numpy | 1.26.4 |
| rospkg | 1.5.1 |
初次使用python
在终端中输入:
python3出现
>>>标志后即代表进入了python的环境。可在输入框中尝试此代码:
print ("Hello World!")
此时终端会反馈回Hello World字样
可以在终端输入pip list来查看目前已经有的python的包
运行机器人案例代码
具体案例代码可查看Python章节,直接将案例中代码复制下来即可使用