吸泵的使用
开始前准备
确保是在myCobot 280 RISC-V机械臂中使用
吸泵的介绍和安装请参考配件。吸泵的适配的机械臂型号包括myCobot 280、myPalletizer 260以及mechArm 270。这里以myCobot 280 RISC-V机械臂为例进行说明。
本章学习内容
如何使用myBlockly控制myCobot 280 RISC-V机械臂上连接的吸泵
API展示
所有API积木块展示
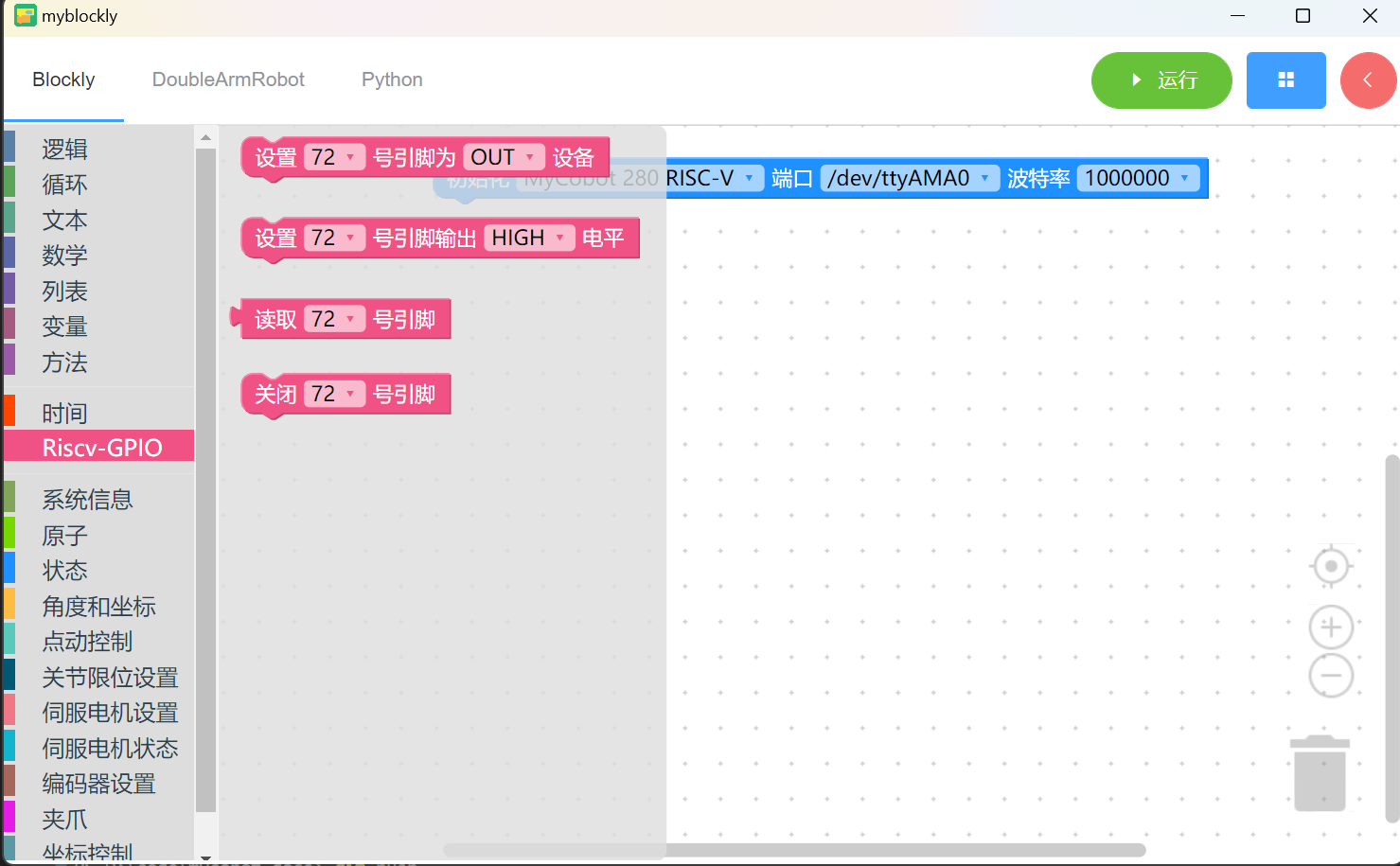
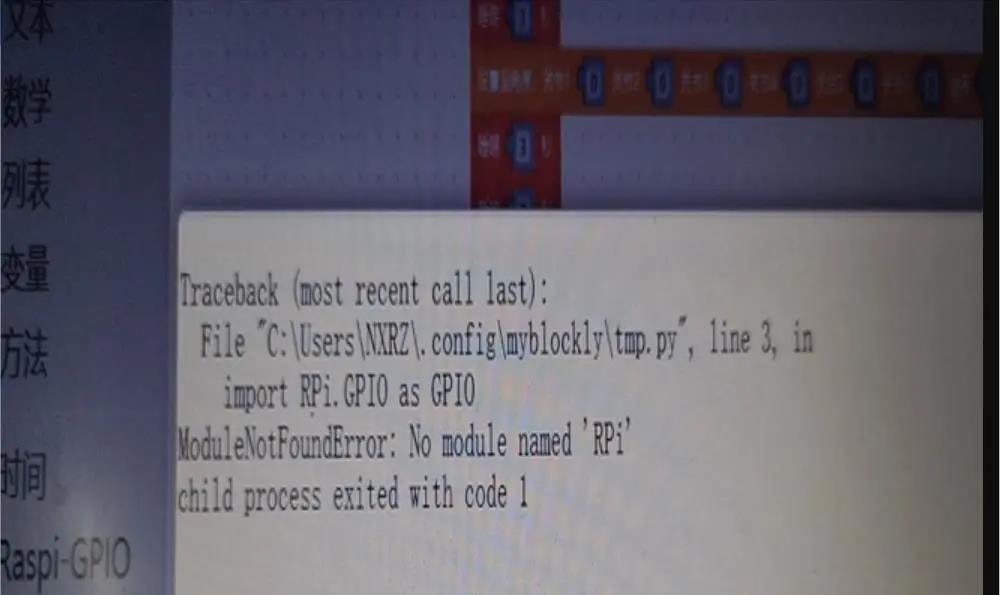
注意:如果模块与机型不匹配,程序就会报错(如下图所示)。
方法模块1:
引脚信号设置为输入或者输出设备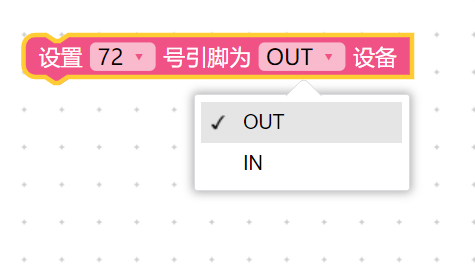
适用范围:只适用于myCobot 280 RISC-V机械臂
参数介绍:
该模块有两个参数可以调整:
- 引脚编号:设备底部的具体引脚号(可以选择对应引脚号)
- 设备信号状态:OUT设置为输出信号,IN设置为输入信号
目的:设置引脚信号为输入或者输出设备
方法模块2:
引脚电平设置
适用范围:只适用于myCobot 280 RISC-V机械臂
参数介绍:
该模块有两个参数可以调整:
- 引脚编号:设备底部的具体引脚号(可以选择对应引脚号)
- 电平状态:HIGH 设置为高电平,LOW 设置为低电平(吸泵低电平开启工作,高电平停止工作)
目的:将引脚设置为高,低电平
方法模块3:
读取引脚电平值(高/低电平)
适用范围:只适用于myCobot 280 RISC-V机械臂
参数介绍:
该模块有一个参数可以调整:
- 引脚编号:设备底部的具体引脚号(可以选择对应引脚号)
目的:获取引脚的电平值(高:1;底:0)
方法模块4:
关闭引脚
适用范围:只适用于myCobot 280 RISC-V机械臂
参数介绍:
该模块有一个参数可以调整:
- 引脚编号:设备底部的具体引脚号(可以选择对应引脚号)
目的:关闭引脚(注意:关闭引脚,会停止高低电平工作,且不能再进行高低电平设置和读取电平值)
简单演示
垂直吸泵 V2.0
- 图形代码如下:只适用于myCobot 280 RISC-V机械臂
引脚72控制吸泵工作
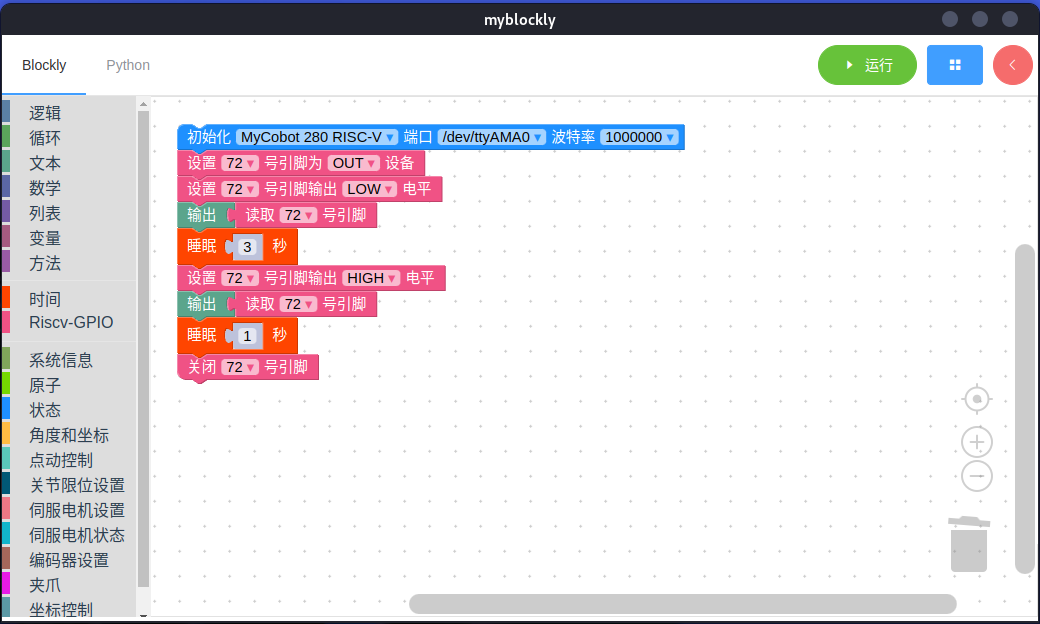
实现内容: 先设置72号引脚为输出设备,然后设置72号引脚为低电平。这时吸泵发出震动,开始工作,吸泵吸起物体,可以读取引脚号状态是否为低电平。工作三秒后,设置72号引脚为高电平,吸泵会停止工作将物体放下,读取引脚状态是否为高电平。一秒后关闭72号引脚,程序结束。