硬件问题
Q:M5屏幕无法显示画面,如何解决?
- 检查电源适配器与机器是否接触良好,可以尝试重新拔插一下电源适配器
- 轻轻按压屏幕边角,让M5satck与内部扩展板接触良好

查看gitbook,下载对应的minirobot固件,注意如果是2021年280m5,建议刷AtomMain2.8的,basic1.0
可以拆开底座螺丝查看内部线缆是否有脱落,如有,请接上后再使用

Q:机械臂上电锁不住如何解决?
- 检查是否有接上原装电源适配器,或者适配器是否接触良好,可以尝试重新拔插电源适配器
检查关节在断电状态,能否正常转动,会不会出现阻力过大或者过小的情况,初步判断是否内部结构物理断裂,无物理断裂则接着往下检查.
320系列产品需要检查急停开关是否为释放状态,只有在释放状态才能正常使用关节,当急停开关为停止状态(开关被按下)的时候,是无法上电且正常通讯的,需要顺时针转动开关,让急停开关保持释放状态

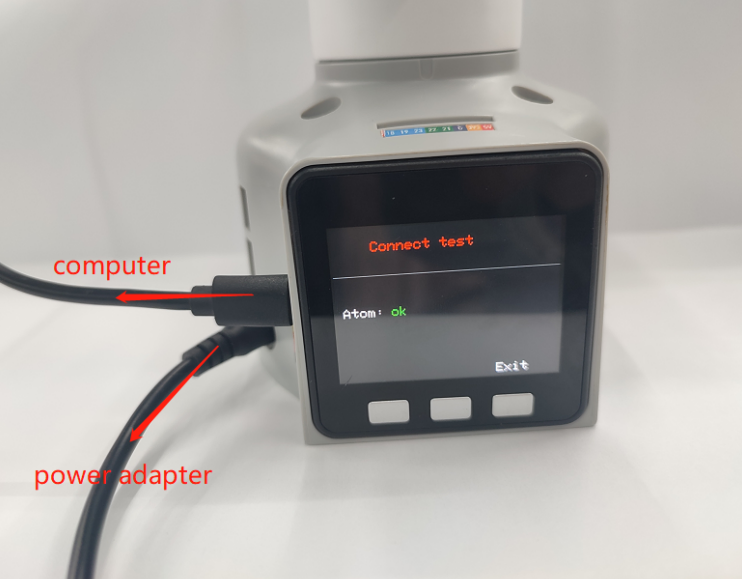
检查Atom固件,方法如下:
在正常情况下,机械臂上电后会自锁,且Atom亮绿灯,如下图所示(注意mechArm无灯态显示)
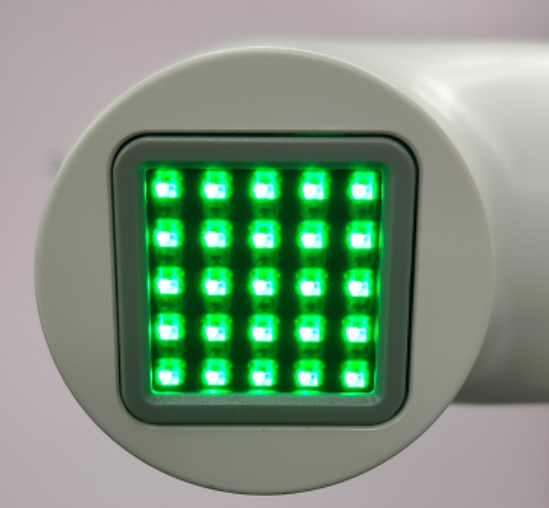
在机械臂上电后,Atom不亮绿灯或者关节无法自锁,可按照以下几点进行排查: ①轻轻按压Atom屏幕,使Atom与机械臂内部板块接触良好。
②查看gitbook获取mystudio使方法,根据机型及版本信息,使用mystudio下载对应的Atom固件,如在烧录过程遇到任何问题,请参考本文mystuidio相关"固件下载异常"获取排查步骤。
③在成功烧录Atom固件且机械臂未连接电源的情况下,使用type-c连接Atom,若Atom亮起绿灯,但拔掉type-c后Atom绿灯熄灭,则判断为判断为Atom正常,但机械臂内部存在线路脱落或损坏问题,需要联系技术人员处理。
④在成功烧录Atom固件且机械臂未连接电源的情况下,使用type-c连接Atom但是没亮绿灯,则判断为Atom硬件损坏,需要联系技术人员更换
Q:按下急停后,释放急停锁不住了,怎么让机械臂再次锁住?
需要给机器重新上电,例如以myblockly给机器上电

Q: 关节抖动、关节角度偏差过大或关节无力下坠如何优化?
参考机器人参数介绍章节,检查实际负载是否在机械臂有效负载范围内,负载过大会导致关节抖动,可适当减轻实际关节的负载
将运动模式更改成刷新模式,这样会机械臂的运行轨迹会相对平滑,具体的API,请参考 set_fresh_mode(1)

查看以下链接内容调整pid:https://drive.google.com/file/d/1UWhaaSTuwLFImuEGY1J2tvgxTQDwWxK_/view?usp=sharing
- 查看gitbook章节,使用mystudio下载对应版本的Atom固件,建议下载最新的
- 查看gitbook第5章节,对机械臂进行零位校准,也可参考下面链接的校准步骤:https://drive.google.com/file/d/1XtKH-ykKWPH0q9Z_YHwzkgwNKRhstHhi/view?usp=sharing
- 使用时间较长的机器(3个月以上)可能会出现关节老化产生关节间隙的情况,可按照以下视频,手动掰动关节,查看是否存在关节虚位:https://drive.google.com/file/d/1tXDUALmfw1z0u6lM9uH5hOHivjbRoWxW/view?usp=sharing
- 如果存在关节老化虚位问题,这种抖动则属于机器自然老化无法避免。
Q: 什么是关节零位点?
以下图为例,关节与关节外壳边缘之前会设计有一个拱形槽,这个就是关节零位点
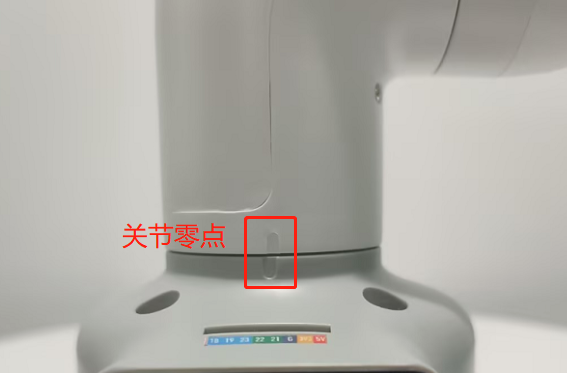
一般校准后零点姿态如下:

Q:有没有零位校准的方法?
请参考gitbook第5章节或者下面这个链接:
https://drive.google.com/file/d/1XtKH-ykKWPH0q9Z_YHwzkgwNKRhstHhi/view?usp=sharing
Q:mycobot320机器底部的GPIO如何使用?
- A:请参考以下用法

Q:mycobot320机器底部的IO有没有办法控制5v的led灯?
A: 请参考树莓派底部IO引脚的例子,其中输出的高电平是24V,如果你要使用5V用于控制led,建议外接降压模块后使用,目前我们暂无使用底部IO控制led的案例
Q:atom在机械臂中的作用是什么?
- A:atom在机械臂中主要进行机械臂的运动学算法控制:包括了正逆运动学,选解,加减速,速度同步,多次方插补,坐标转换等,需要的实时控制与多线程等。atom的相关程序暂不开源。
Q:不同版本的机械臂支持什么通信接口?
- A:基于微处理器的机械臂支持socket通信TCP;基于微控制器的机械臂可以USB转串口通信。
Q:电机使用过程中自动断电,是为什么?
- A:使用时间较长电机过热保护。此现象是正常现象,等待几分钟后即可继续使用。