开始前准备
其他系列:确保机器正常
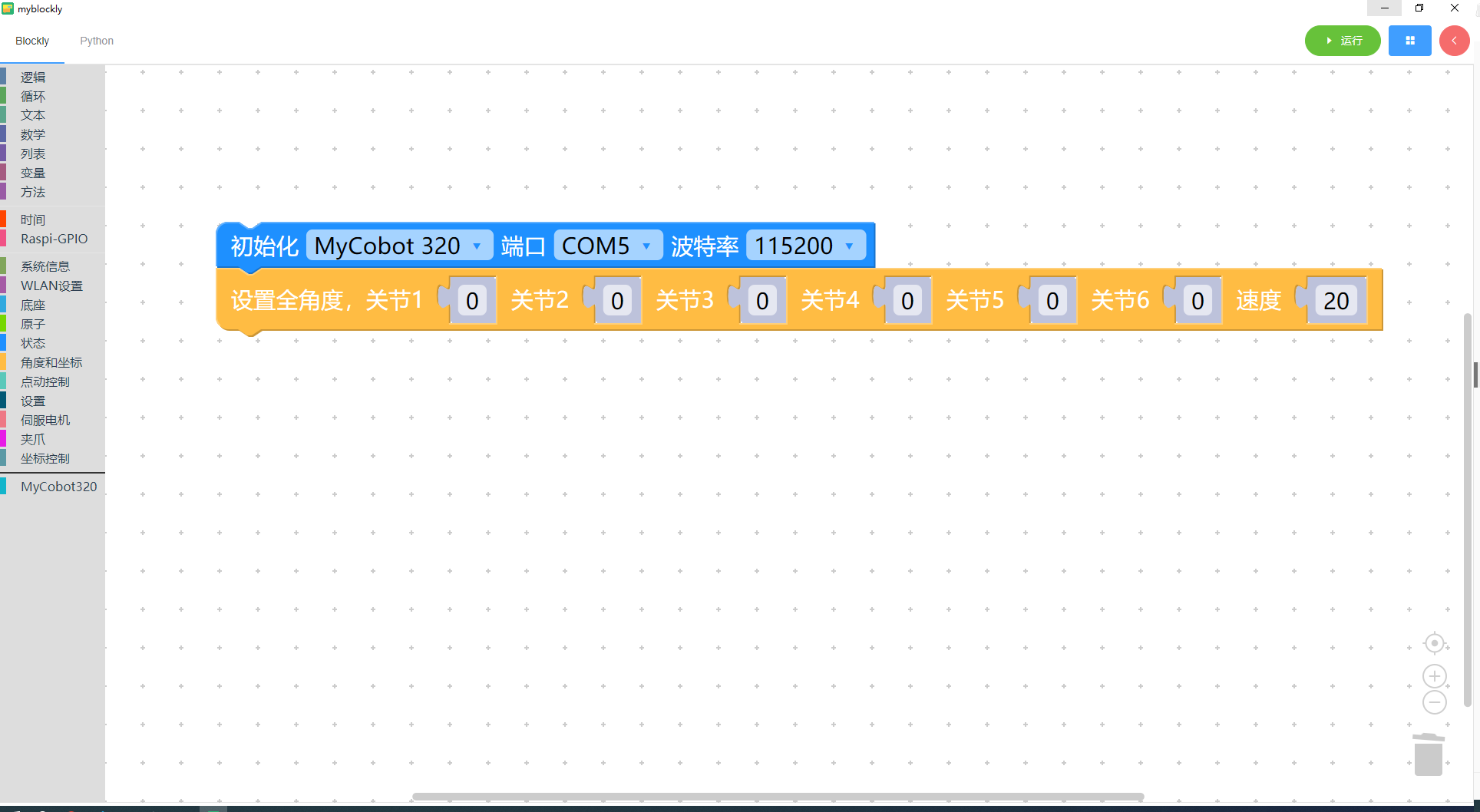
如何使用 myBlockly 控制机械臂回到原点
方法模块:设置角度
设置角度
参数介绍:
该模块有两个参数可以调整:
目的:控制机械臂,将机械臂的所有轴的角度回到原点(角度为 0)
← 上一页 | 下一页 →