首次使用自查-机器关节功能验
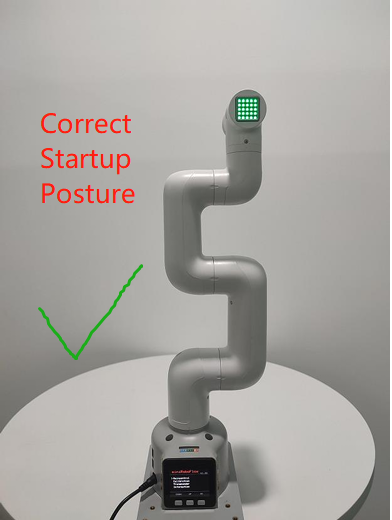
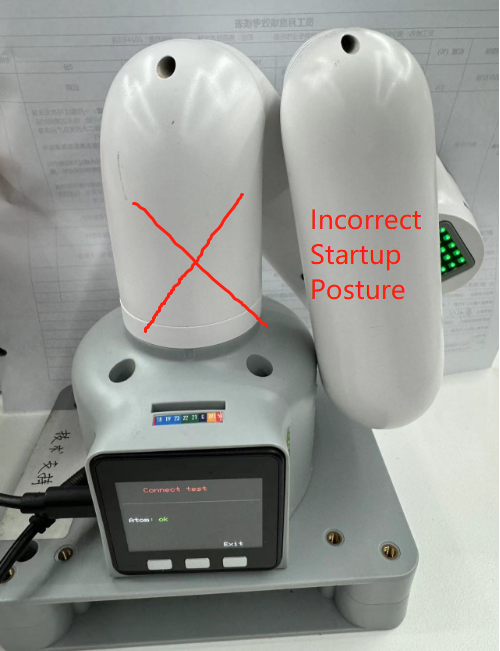
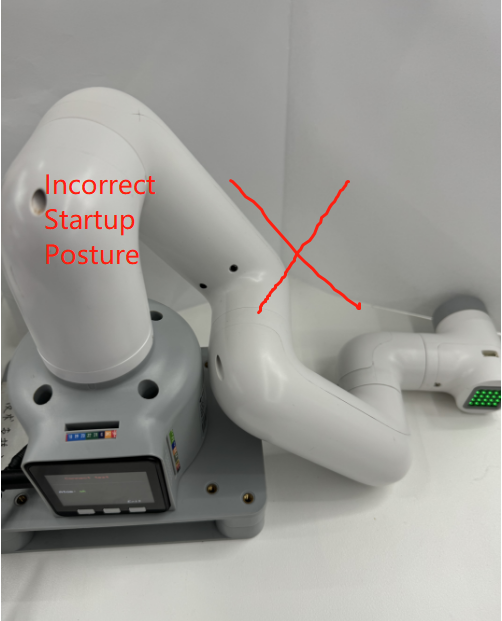
注意: 在机械臂启动时,请注意不要让机械臂处于蜷缩或者关节之间触碰的姿态,建议启动时,机械臂姿态应如下图1所示,图2、图3均为错误启动姿态:
 |
 |
 |
|---|---|---|
| 图1 (正确姿态) | 图2(错误姿态) | 图3(错误姿态) |
关节控制方法步骤
1.进行硬件连接
M5系列机器的硬件连接:
mycobot320M5机器则需要确保接上电源适配器、usb数据线及急停开关,并确保急停开关处于释放状态,未正确使用急停开关将无法正常使用mycobot320,急停开关请参考下图:

2.进行软件环境安装与配置
使用M5版本机器需要自备一台电脑。在电脑上安装python、pymycobot库及usb串口驱动,具体请参考gitbook的环境配置章节。
3.选择正确的通讯方式
每种通讯方式使用前,需要确保将M5的LCD屏幕调到对应方式,并保持这个通讯状态,才能正常控制机械臂。 M5机械臂在使用myblockly,python,ros等开发方法需要确保M5的LCD屏幕停留在Atom:ok界面,如下图所示:
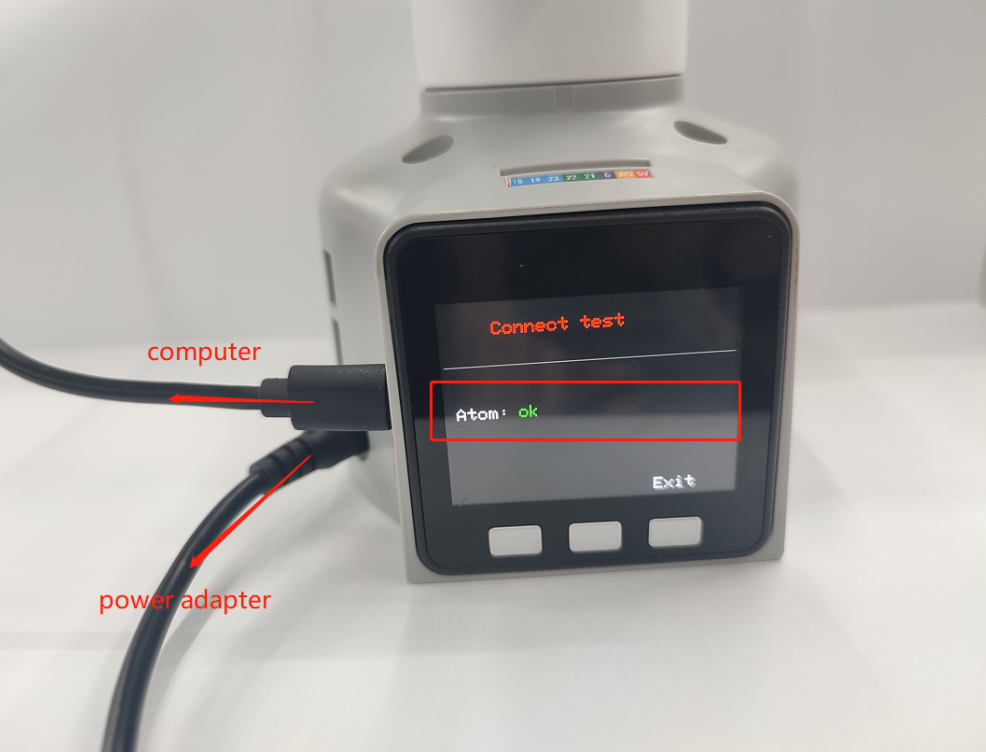
注意: 当屏幕显示Atom:no时,需要重新上电重启机器,并根据本文硬件相关“机械臂上电锁不住如何解决”的自检步骤去检查
4.USB通讯示例
请使用myblockly或者python源码案例进行机械臂关节运动验证。
特别注意使用usb串口开放方式需要选择对应串口及波特率,才能使机械臂与电脑正常通讯,从而正常控制机械臂:
| 机器型号 | 串口号 | 波特率 |
|---|---|---|
| 320 M5 | Win: COM; Linux: /dev/ttyUSB | 115200 |
注意: 关于M5系列机器的COM口的选择,需要根据当前个人电脑识别的端口号进行实时选择,因为每个人电脑识别到的COM口号都可能不一样且不固定的,具体选择的方案可以在本文档查看“Q:为什么选择某个com口的时候会被拒绝连接?或者说怎么找到对应的com口?”的答复
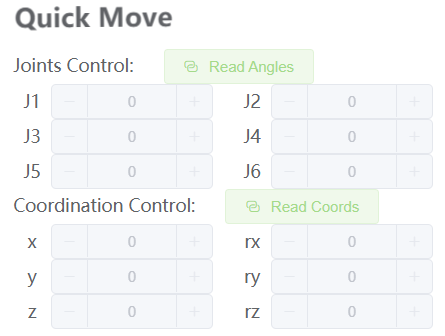
4.1 机械臂关节运动myblockly源码
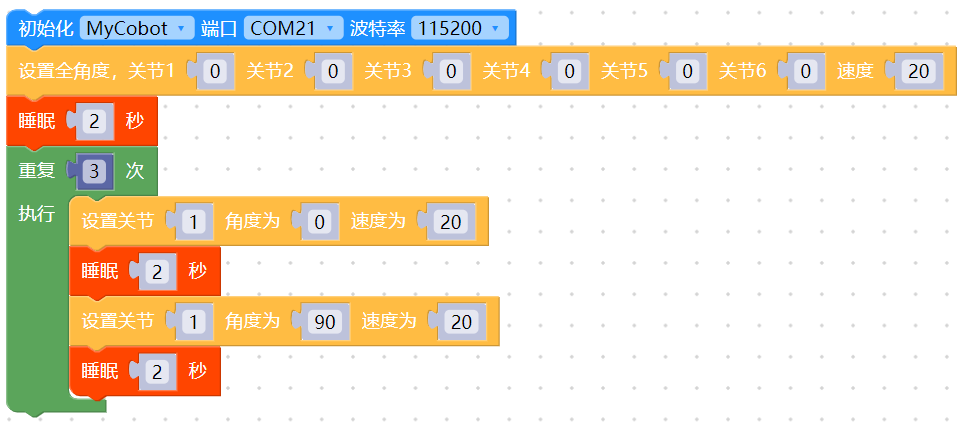
当你看到机械臂的关节1在0-90度循环运动3次效果,说明机械臂关节1响应正常,可尝试更改关节ID测试其他关节及循序渐进学习使用gitbook的其他案例或者利用机械臂做各种有趣的事情! 指的一提的是,如果你目前对myblockly的代码块开发方式并不熟悉,还有一个相对快捷的关节验证方式是:使用myblockly快速移动工具进行简单的关节运动控制,具体用法请参考:myblockly快速移动工具使用
4.2 机械臂关节运动关节python源码
#运动效果为机械臂围绕零位姿态,1-6关节逐一运动±20度
import time
from pymycobot.mycobot320 import MyCobot320
if __name__ == "__main__":
cobot = MyCobot320('com22',115200)#根据机型选择对应的端口号及波特率
cobot.set_fresh_mode(1)
cobot.send_angles([0, 0, 0, 0, 0, 0], 20)
time.sleep(2)
print("start")
for i in range(1,7):
cobot.send_angle(i, (-30), 20)
time.sleep(2)
cobot.send_angle(i, (30), 20)
time.sleep(2)
cobot.send_angle(i, (0), 20)
time.sleep(2)
当你看到机械臂围绕零位姿态,1-6关节逐一运动±20度的运动效果,说明关节1-6响应正常,可循序渐进学习使用gitbook的其他案例或者利用机械臂做各种有趣的事情!
如果执行案例没有看到相对应的效果,那么请参考下文的常见问题解决方案,另外请注意在联系技术支持人员前确保你已经检查了以下5点:
- 机械臂是否能在上电之后正常锁住?如果不能锁住,请参考FQA硬件相关问题:“Q:机械臂上电锁不住如何解决?”进行排查
- 如果你的是M5系列机械臂,你的电脑与M5stack侧面的usb口是否通过type-c连接着?
- 如果你的是M5系列机械臂,你的屏幕LCD现在是否停留在停留在Atom:ok界面?
- 如果你的是M5系列机械臂,LCD界面显示Atom:no,请参考“Q:机械臂上电锁不住如何解决?”进行排查
- 运行代码是否有任何报错信息?
请尽可能详细描述下使用细节,如果方便的话请提供一个操作视频,这将会有助于快速分析定位问题,提前感谢!