Electric gripper
Applicable models: myCobot 320, myCobot Pro 600, myCobot Pro 630
Product image

Specifications:
| Name | mycobot Pro Electric Gripper |
|---|---|
| Model model | myCobotPro_Gripper_PGE_8 |
| Process | Metal + 7500 Nylon |
| Clamping range Clamp size | 0-14mm |
| Maximum clamping force Clamp force | 2-5N |
| Drive mode drive | Electric |
| Transmission mode | Gear rack + cross roller guide |
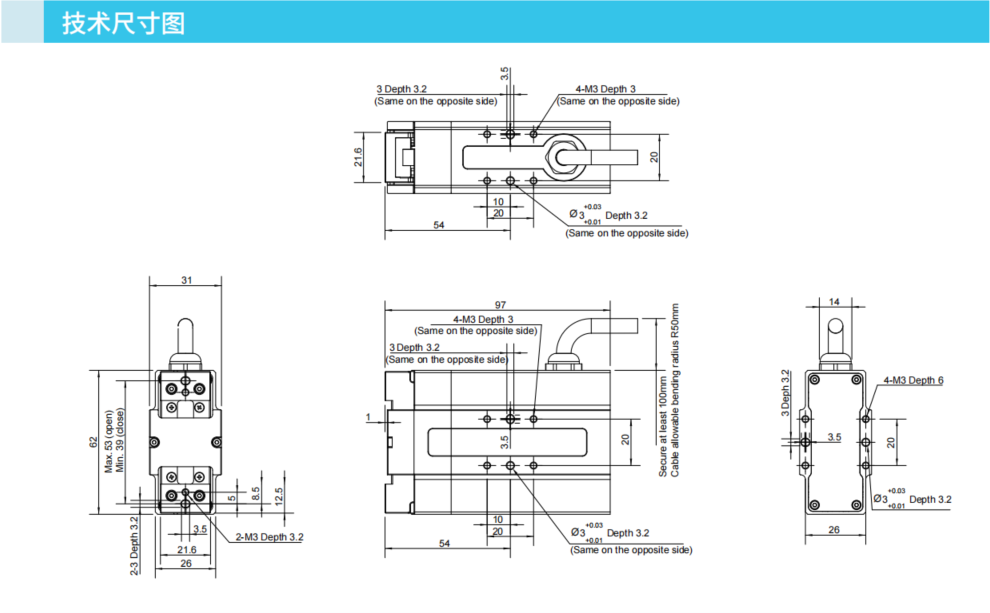
| Size size | 97×62×31mm |
| Weight | 460g |
| Fixing method Fixed | Screw fixing |
| Environment requirements | Normal temperature and pressure |
| Control interface control | Serial port |
| Applicable equipment | myCobot 320, myCobot Pro 600, myCobot Pro 630 |
Electric gripper: Used to grip objects
Introduction
The PGE series is an industrial thin parallel electric gripper, and the number represents the maximum gripping force of the gripper. The gripper is equipped with a pair of parallel fingertips, which run symmetrically during movement. The main structure of the gripper is a smooth rectangular structure, with a small size and saving installation space. It has 5 mounting holes to meet different installation conditions of the equipment.
Fast response, high grasping frequency, and an 8-core communication interface, mainly to clamp or jam objects, suitable for relatively light objects.
Working Principle
- The motor drives the gear rack and cross roller guide to realize the opening or closing of the jaws. The positioning point of the electric jaws is controllable and the clamping is controllable.
Applicable objects
- Volume smaller than the clamping stroke
- Weight smaller than the maximum clamping weight
- Customized fingertips can expand more items
Product parameters
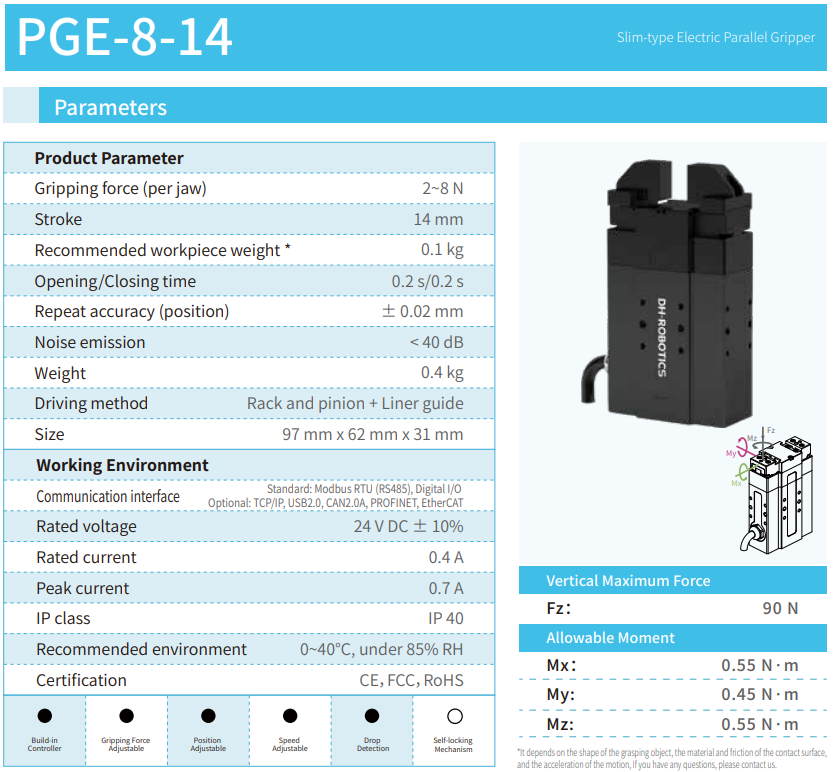
Operating environment
| Environment | Description |
|---|---|
| Communication protocol | RS - 485 |
| Operating voltage | 24V |
| Rated current | 0.25A |
| Peak current | 0.5A |
| Protection level | IP40 |
| Recommended use environment | 0-40℃ |
Installation and use
Check whether the accessories package is complete: screws, hex wrench, clamp with connecting wire, clamp and end fixture of robot arm

Clamp installation:
Structural installation:
Align the screws with the four screw holes at the end of the robot arm and tighten them:

Insert the electric gripper into the fixture and tighten the fine screws on both sides, a total of eight:

Electrical connection:
Insert the 485 line into the robot arm control interface:

Instructions for use:
MyCobot Pro 600 Instructions for use:
The robot system needs to be started before use
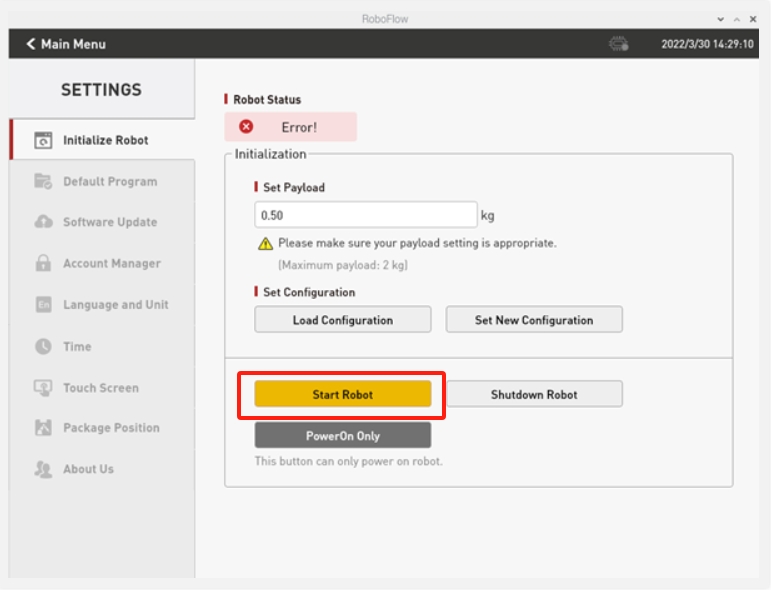
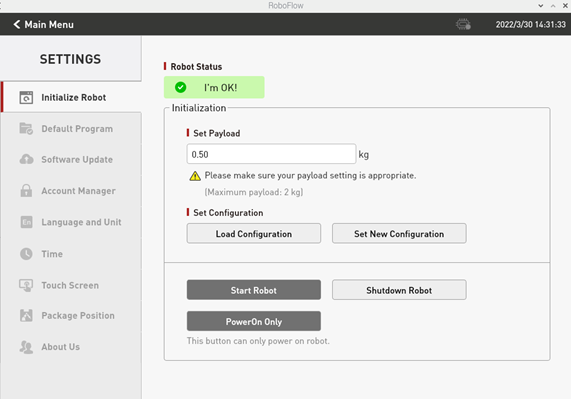
- Run RoboFlow
- Click Define New Gripper, fill in Gripper Name as "DH PGE 8" (must be this name), and then click Save;
- Saved status Select open or close, the overall steps are as shown below:
