myAGV JN 2023

1 Structural Parameters
1.1 Chassis Parameters
| Indicator | Parameters |
|---|---|
| Name | Mobile Robot |
| Model | myAGV Jetson Nano 2023 |
| Motors | Planetary Brushless DC Motors |
| Wheels | Mecanum Wheels |
| Payload | 5KG |
| Weight | 4.16KG |
| Laser Radar Scanning Range | 0.12-8M |
| Laser Radar Angle | 360° |
| Built-in Camera | 8 megapixels, 77° field of view, 2.96mm focal length |
| Standby Time | 328min |
| Endurance | 181min |
| Maximum Movement Speed | 0.9m/s |
| Power Supply | 12.6V, 2A |
| Operating Temperature | -5°C-45°C |
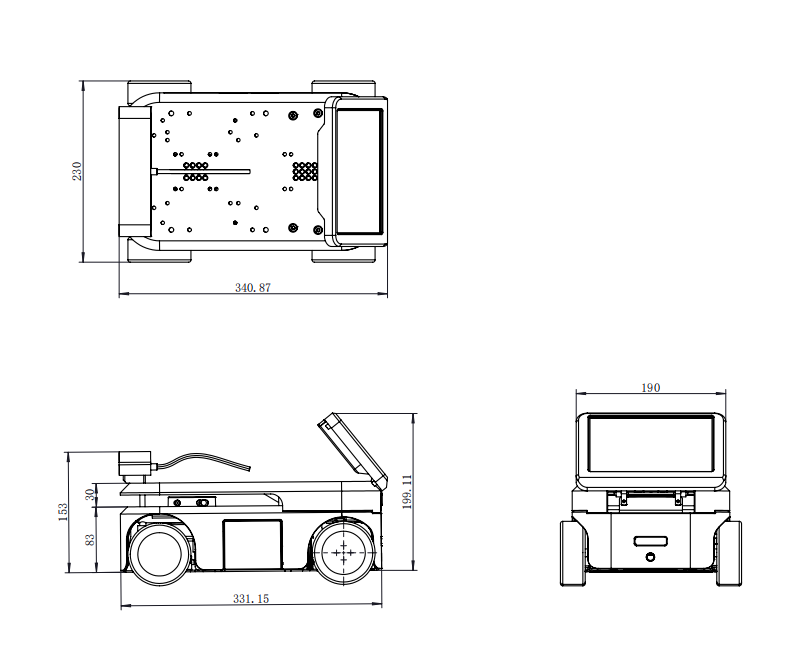
1.2 Specifications and Dimensions
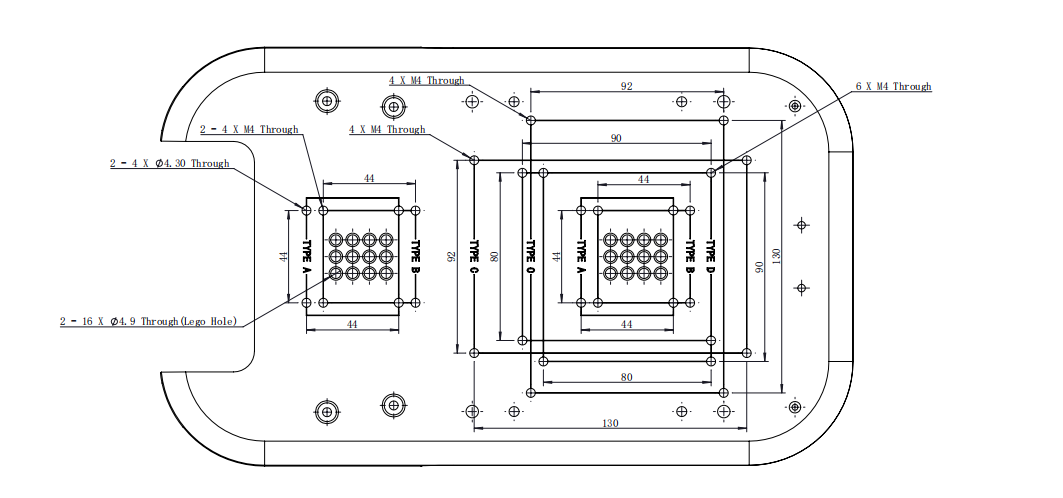
1.3 Hole Mounting
2 Electronic Parameters
| Indicator | Parameters |
|---|---|
| USB | USB 3.0 *2 |
| Ethernet | RJ45 *1 |
| IO | G7, G8, G9, G10, G11, G17, G18, G22, G23, G24, G25, G27 |
| Main Control Model | Jetson Nano B01 |
| CPU | CPU Architecture: ARM, Number of Cortex-A57 Cores: 4, Maximum Clock Frequency: 1.43 GHz, L2 Cache: 2MB |
| GPU | GPU: NVIDIA Maxwell Architecture, 128 CUDA Cores |
| Memory | 4GB |