myAGV 2023 - Gamepad Control
1 Start the lower-level communication of the car
After powering on the car, open a terminal console (shortcut: Ctrl+Alt+T), and enter the following command in the command line:
cd myagv_ros
roslaunch myagv_odometry myagv_active.launch
Open the launch files required for the car's SLAM laser scanning and wheels, if displayed.
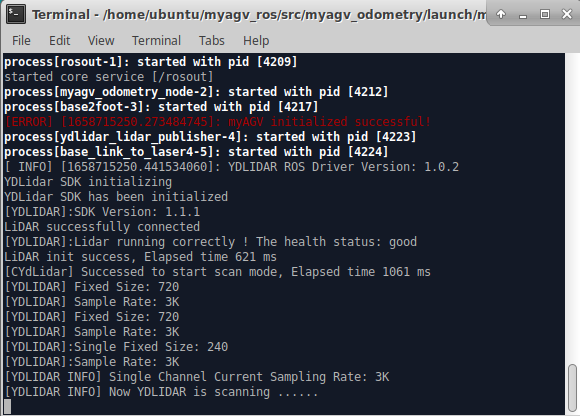
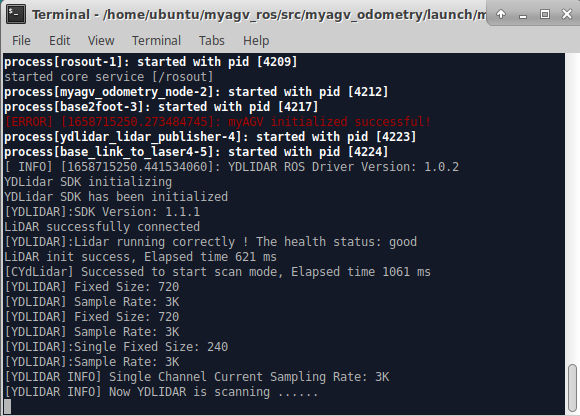
myAGV initialized successful! ...... Now YDLIDAR is scanning ......
In that case, it means that the car's radar and wheels have successfully established communication. The status displayed in the terminal is as follows:
2 Start Keyboard Communication
Open a new terminal console, and in the terminal command line, enter:
cd myagv_ros
roslaunch myagv_teleop myagv_teleop.launch
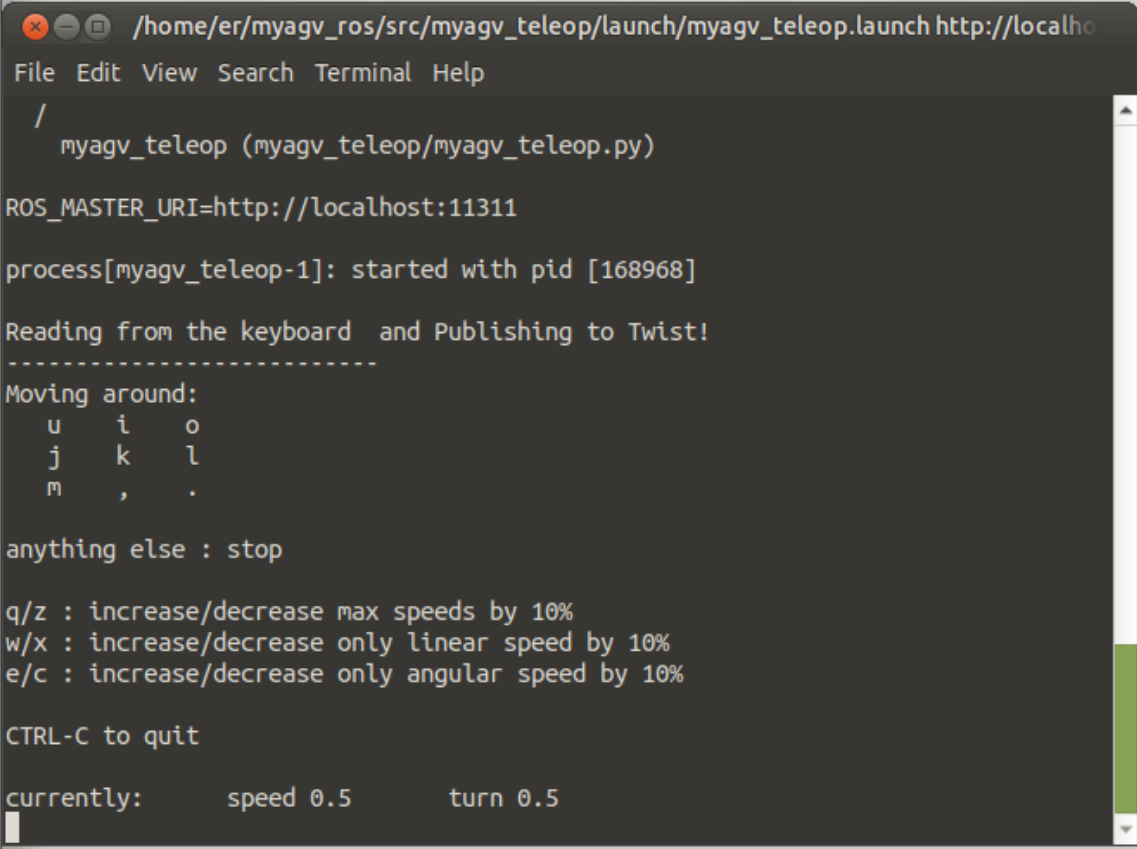
| Key | Direction |
|---|---|
| i | Forward |
| , | Backward |
| j | Move Left |
| l | Move Right |
| u | Rotate Counterclockwise |
| o | Rotate Clockwise |
| k | Stop |
| m | Rotate Clockwise Backward |
| . | Rotate Counterclockwise Backward |
| q | Increase Linear and Angular Velocity |
| z | Decrease Linear and Angular Velocity |
| w | Increase Linear Velocity |
| x | Decrease Linear Velocity |
| e | Increase Angular Velocity |
| c | Decrease Angular Velocity |
myAGV 2023-Gamepad Control
1. Install the Driver
Open a new terminal console, and enter the following command in the command line:
sudo apt-get install joystick
When prompted to make a selection, simply enter Y and press Enter.
2. Launch the Car's Launch Files
Open a new terminal console, and enter the following command in the command line:
cd myagv_ros
roslaunch myagv_odometry myagv_active.launch
Success indicator:
Now YDLIDAR is scanning ......
3. Launch the Gamepad Control Launch File
Currently, two gamepads are supported, and different files need to be run for control.
Gamepad One
Insert the USB receiver of the Bluetooth gamepad into the car. Open a new terminal console, and enter the following command in the command line:
cd myagv_ros
roslaunch myagv_ps2 myagv_ps2.launch
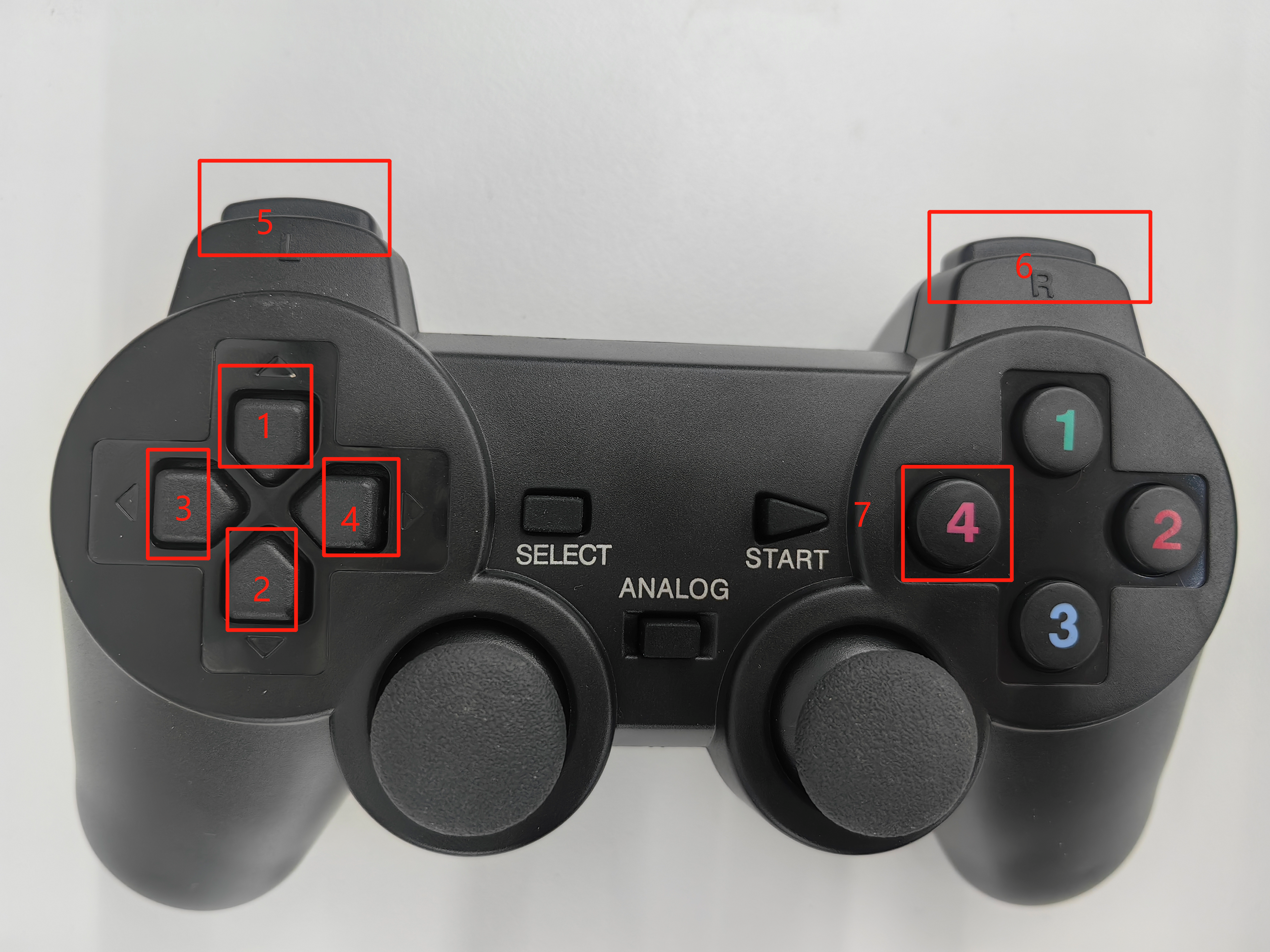
If you have reached this point successfully, you can now control the car's movement using the gamepad. The gamepad has 7 buttons to control the car's movement, as shown in the figure: 1~4 control the car's forward, backward, left, and right movement, 5 controls counterclockwise rotation, 6 controls clockwise rotation, and 7 is the stop button.

Gamepad Two
Insert the USB receiver of the Bluetooth gamepad into the car. Open a new terminal console, and enter the following command in the command line:
cd myagv_ros
roslaunch myagv_ps2 myagv_ps2_number.launch
If you encounter an error stating that the
myagv_ps2_number.launchfile cannot be found, please visit GitHub to download the latest ROS package and reinstall it for use.
If you've reached this point successfully, you can now control the car's movement using the gamepad. The gamepad has 7 buttons to control the car's movement, as shown in the figure: 1~4 control the car's forward, backward, left, and right movement, 5 controls counterclockwise rotation, 6 controls clockwise rotation, and 7 is the stop button.