Catalogue
Introduction
1 Product Introduction
1.1 Design Philosophy
1.2 Suitable Users
1.3 Application Scenario
1.4 Accessories Tools
1.4.1 IPS Touch Screen
1.4.2 Backup Battery
2 Product Feature
2.1 Machine Specification
2.2 Control Core Parameter
2.3 Mechanical Structure Parameter
2.4 Electrical Characteristic Parameter
3 User Notes
3.1 Safety Instructions
3.2 Transport and Storage
3.3 Maintenance and Care
3.4 FAQs
1 Software
2 Hardware
3 Others
4 First Install and Use
4.1 Product Standard List
4.2 Product Unboxing Guide
4.3 Power-on Test Guide
5 Basic Application
5.1 System instruction manual
5.2 ApplicationUse
5.2.1 myblockly
1 Myblockly first use
2 Install and uninstall
3 Interface description
4 Q&A
5 API
5.2.2 myStudio
1 setup
2 Install driver
3 Flash firmwares
4 Other function
5.2.3 AGV_UI
5.3 FirmwareUse
5.3.1 firmware update info
5.3.2 how to burn firmware
6 SDK Development
6.1 ApplicationBasePython
6.1.1 Environment Building
6.1.2 Introduction to API
6.2 ApplicationBaseROS1
6.2.1 ROS Introduction
6.2.2 ROS Installation
6.2.3 Using Common ROS Tools
6.2.4 Basic Control Based on ROS
6.2.5 Real-time Mapping with Gmapping
6.2.6 Navigation - Map Navigation
7 Scenario Examples
7.1 myAGV+280Pi Composite Robot
7.1.1 Socket communication control
7.1.2 Aruco code recognition and transportation scenarios
7.2 myAGV+280M5 Composite Robot
7.3 myAGV+280JN Composite Robot
7.4 myAGV+270M5 composite robot handle remote control
8 Documents Download
8.1 Gitbook Download
8.2 Product Drawings
8.3 Software Documentation
8.4 System Information
8.4.1 System Image
8.4.2 Image Burning
8.5 Publicity Material
9 About Us
9.1 Elephant Robotics
9.2 Contact us
Published with GitBook
In this Chapter:
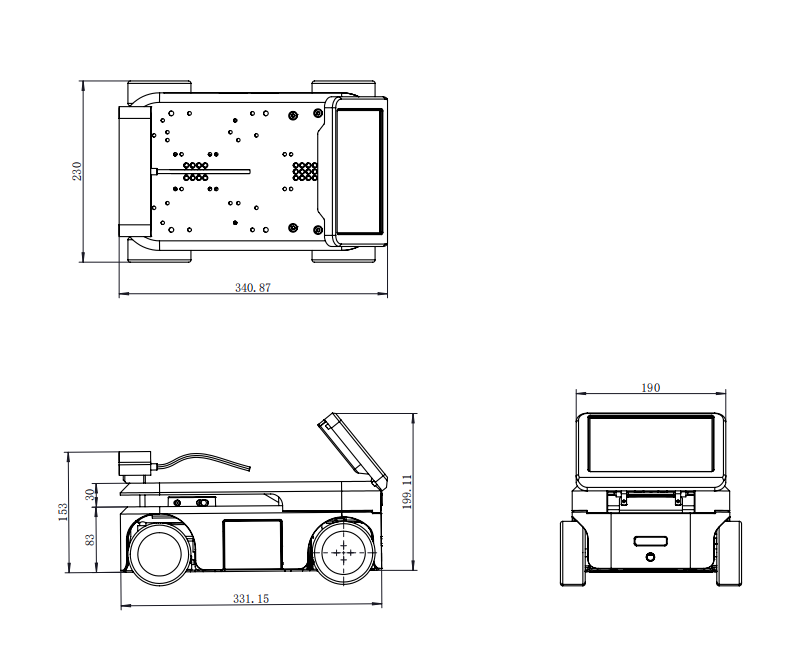
2.3 Mechanical Structure Parameter
Structural dimension parameter
1 Specifications and Dimensions
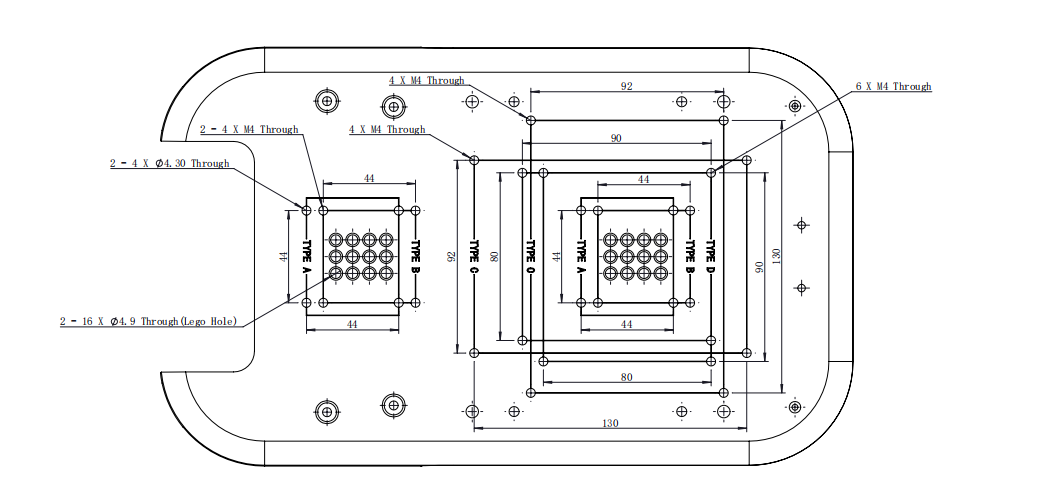
2 Hole Mounting
← Previous Page
|
Next Page →
results matching "
"
No results matching "
"