1、Emulation
We provide a number of static and dynamic simulations to interact with the MyarmM750.
1.1 Static simulation
Static simulation here refers to the use of the sliding module in rviz2 to interact with the MyarmM750 in the simulation
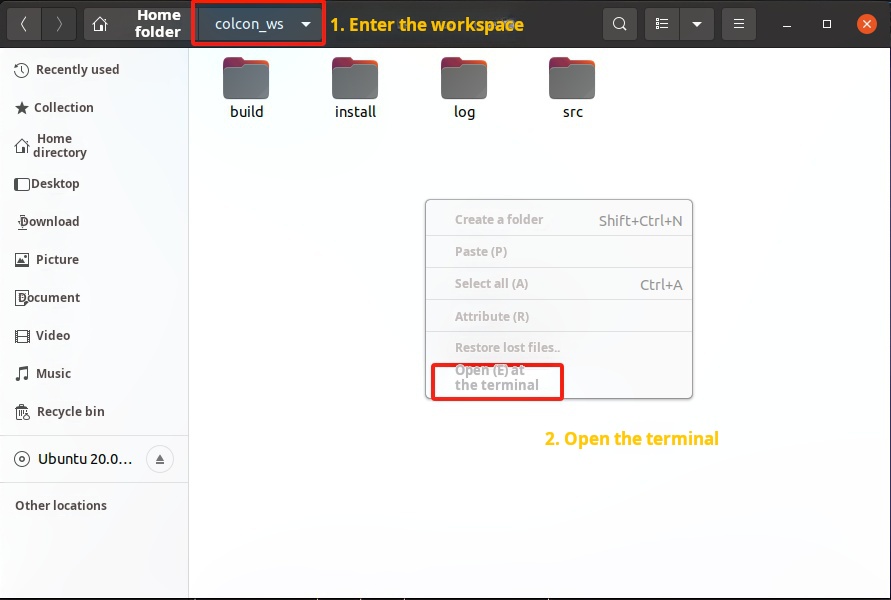
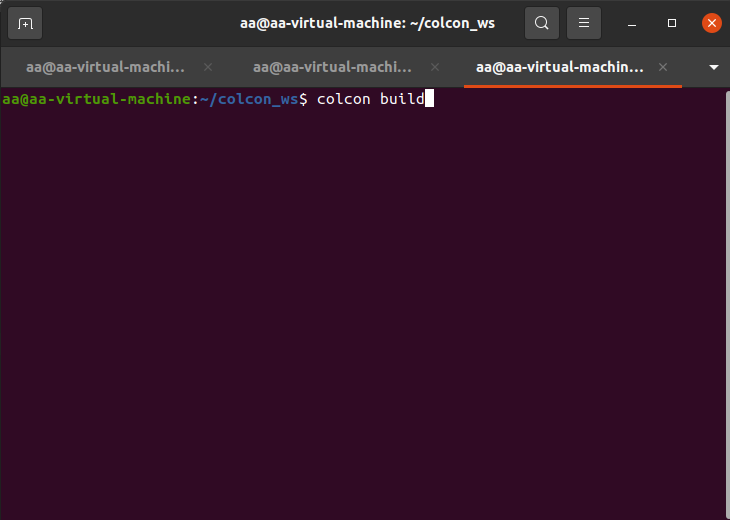
In the Workspace Open Terminal command line, enter:
colcon build
Create a new terminal:
source install/setup.bash
ros2 launch myarm_m750 test.launch.py
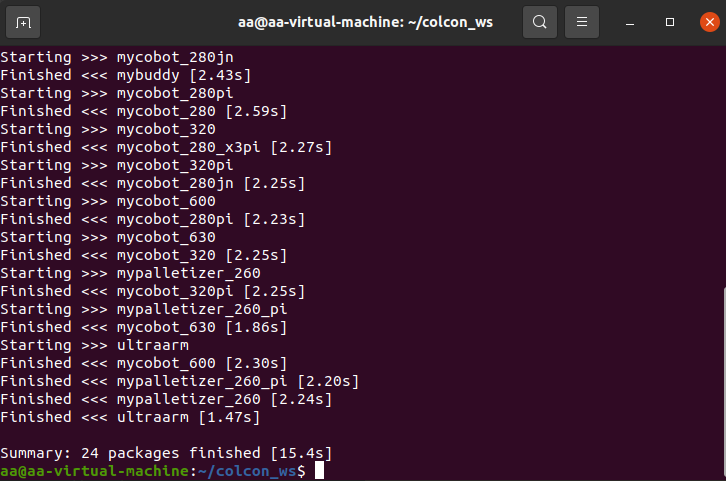
After successfully running the launch file, the terminal will display:
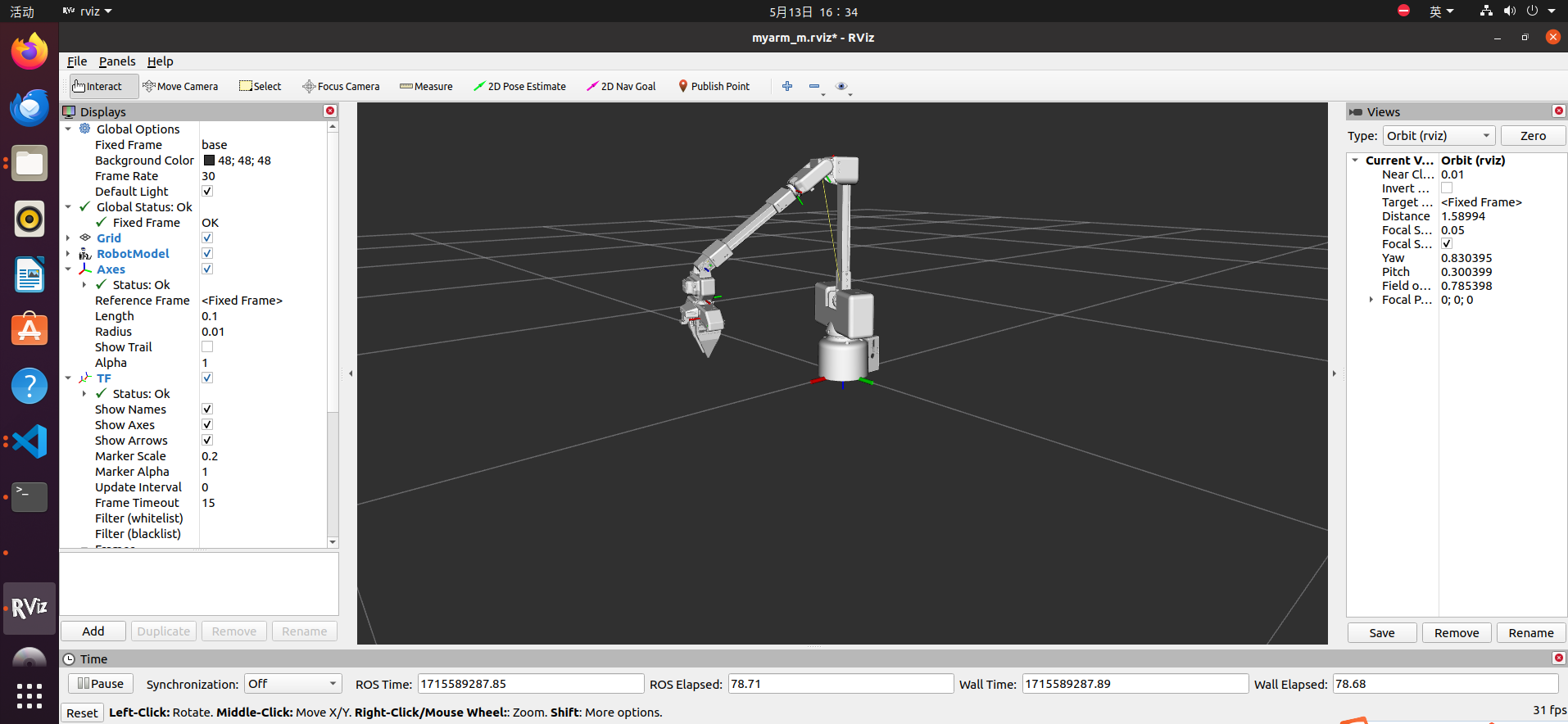
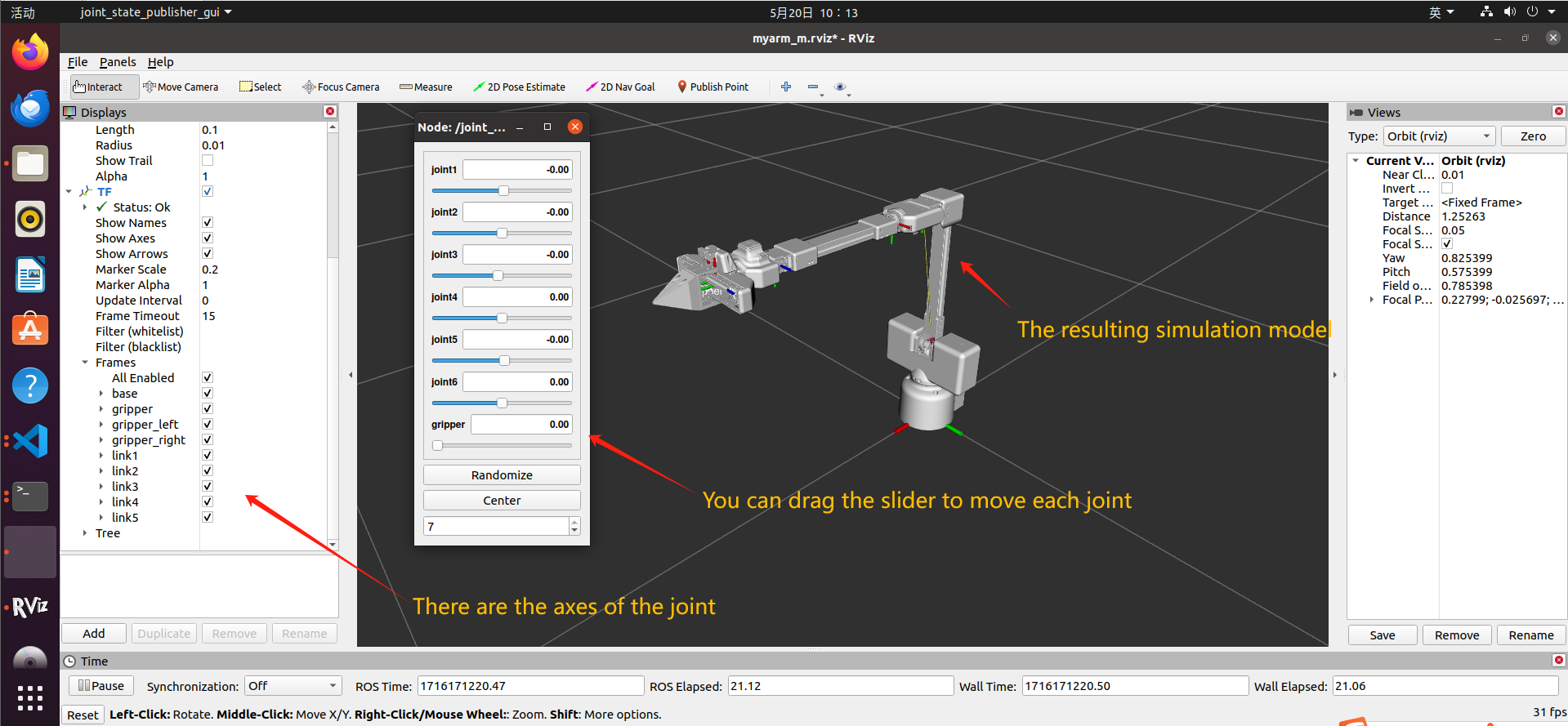
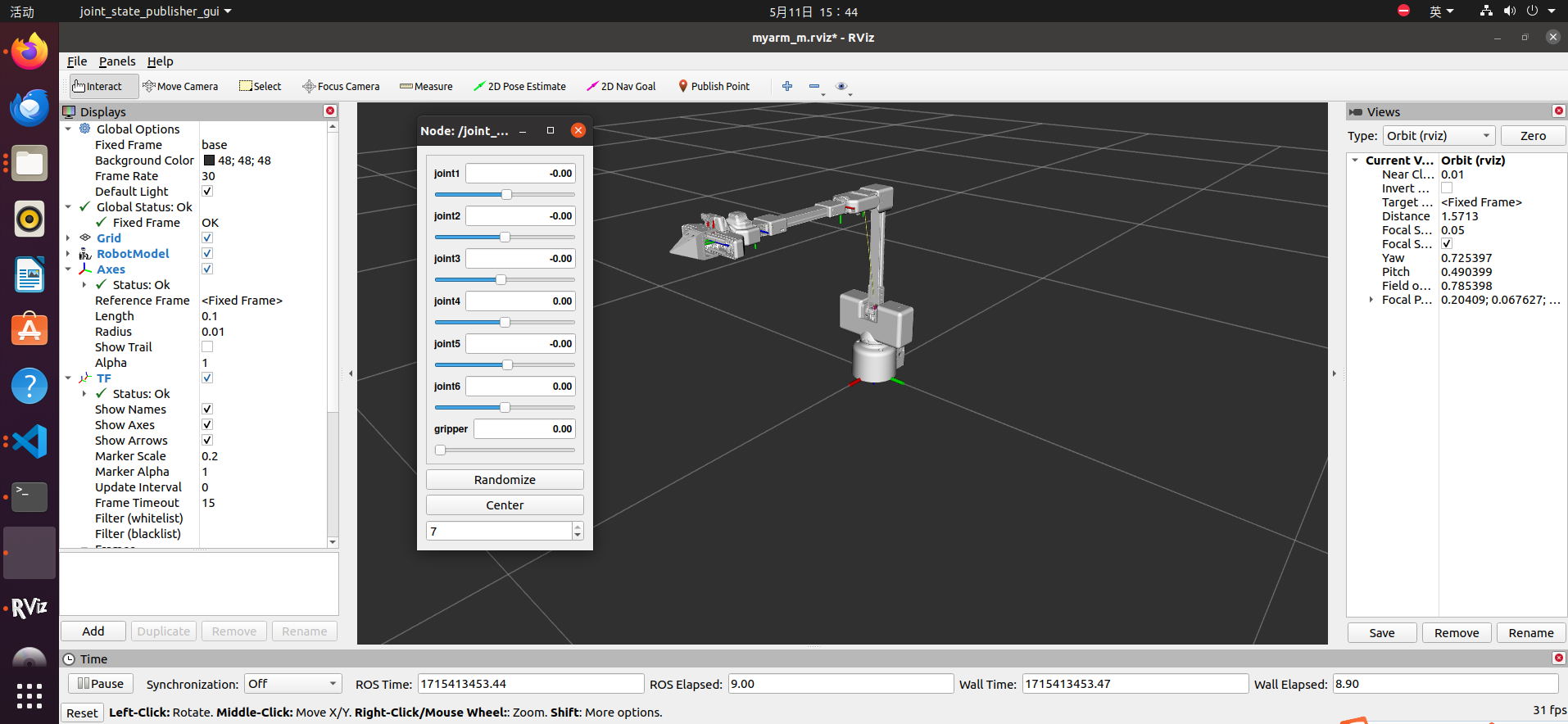
At the same time, rviz will be opened to generate a simulation model of MyarmM750
1.2 Dynamic simulation
Dynamic simulation here refers to the interaction of the MyarmM750 in motion reality with the MyarmM750 in the simulation
First of all, we need to connect the MyarmM750 robotic arm to our computer via a USB to TypeC cable and power it on
Select the Transponder button and press the OK button

Then the screen will be displayed:
We can see that the arrow points to "USB UART", then press the "OK" button, after entering "NO", then press the "Exit" button, go back to the arrow pointing to "USB UART", and then press the "OK" button, then "OK" will be displayed "OK"
At this time, our MyarmM750 has been successfully connected to the computer
Next, enter it in the Workspace Open Terminal command line:
colcon build
source install/setup.bash
ros2 launch myarm_m750 test.launch.py
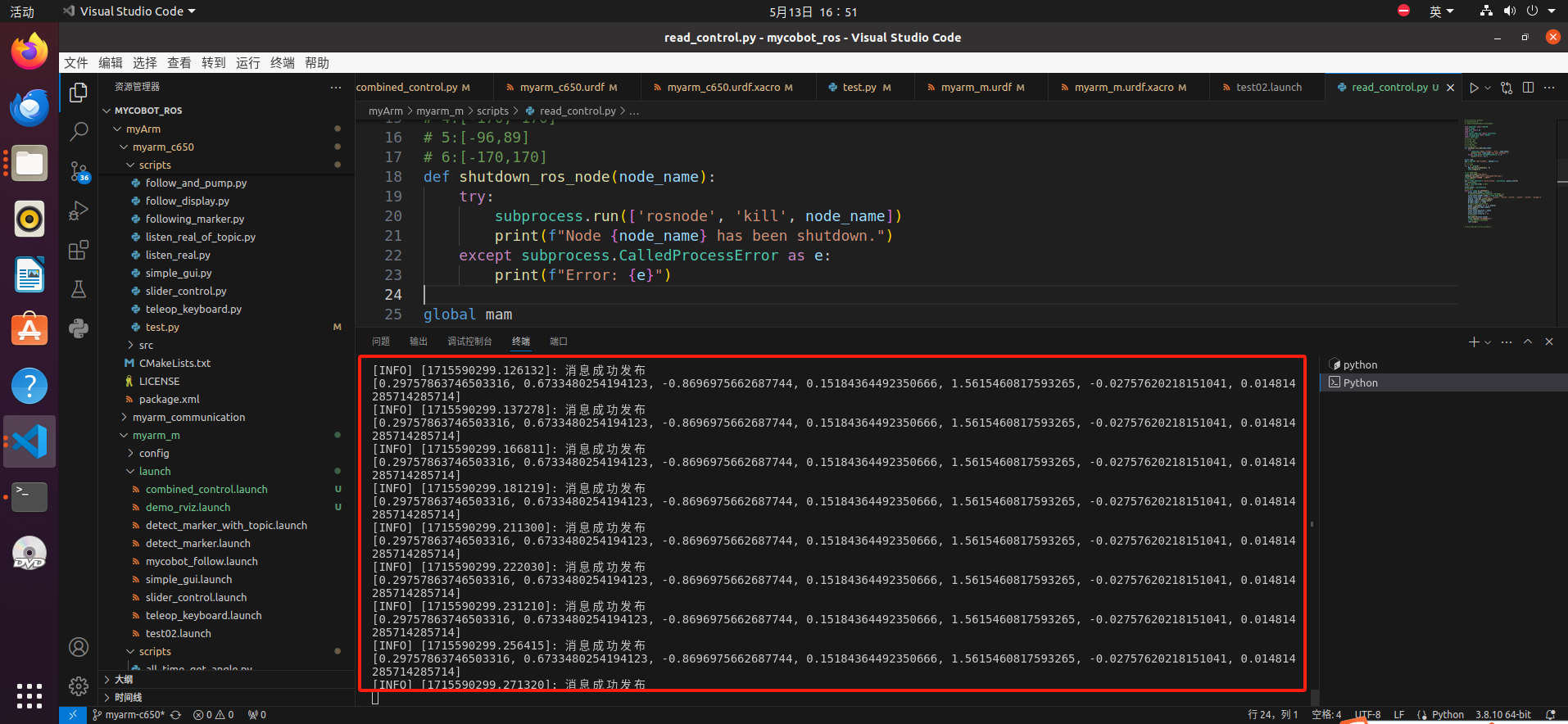
After successfully running the launch file, the terminal will display:
The rviz file will also display normally
Open the project in VS code and find the read_control.py file myArm/myarm_m750/myarm_m750/read_control.py
- Open the .py file, right-click, select "Run Python", and then click "Run Python file in the terminal"
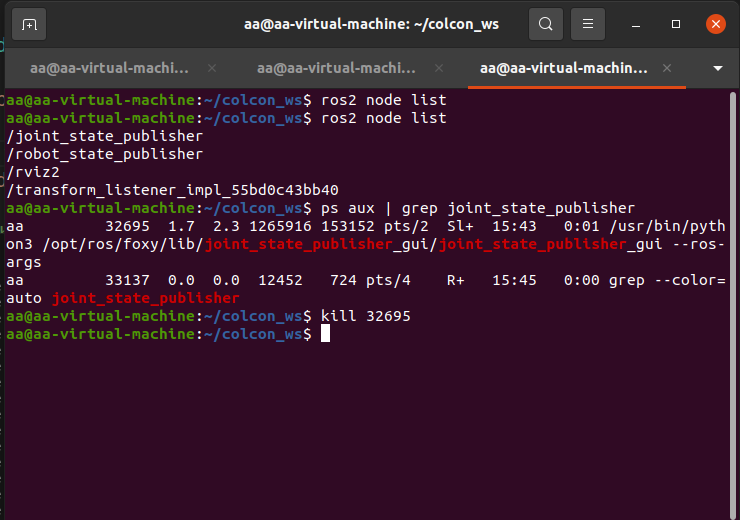
To create a new terminal in the workspace, enter the following command, first look at the running node, then look at the PID of the joint_state_publisher node, and finally kill the number string generated by this node:
ros2 node list
ps aux | grep joint_state_publisher
kill 32695 #This string of numbers is generated at random
Next, we move the real-life MyarmM750 robotic arm with our hands, and the robotic arm in rviz will also follow: