C650 control M750 program example
Program address
https://github.com/elephantrobotics/pymycobot/tree/main/demo/myArm_M%26C_demo_v1.1
Installation dependency
pip install -r requirement.txt
Run the program
python main.py
Program instructions
There is a sequence requirement for opening the serial port: open the serial port connection of myArmM first, and then open the serial port connection of myArmC.
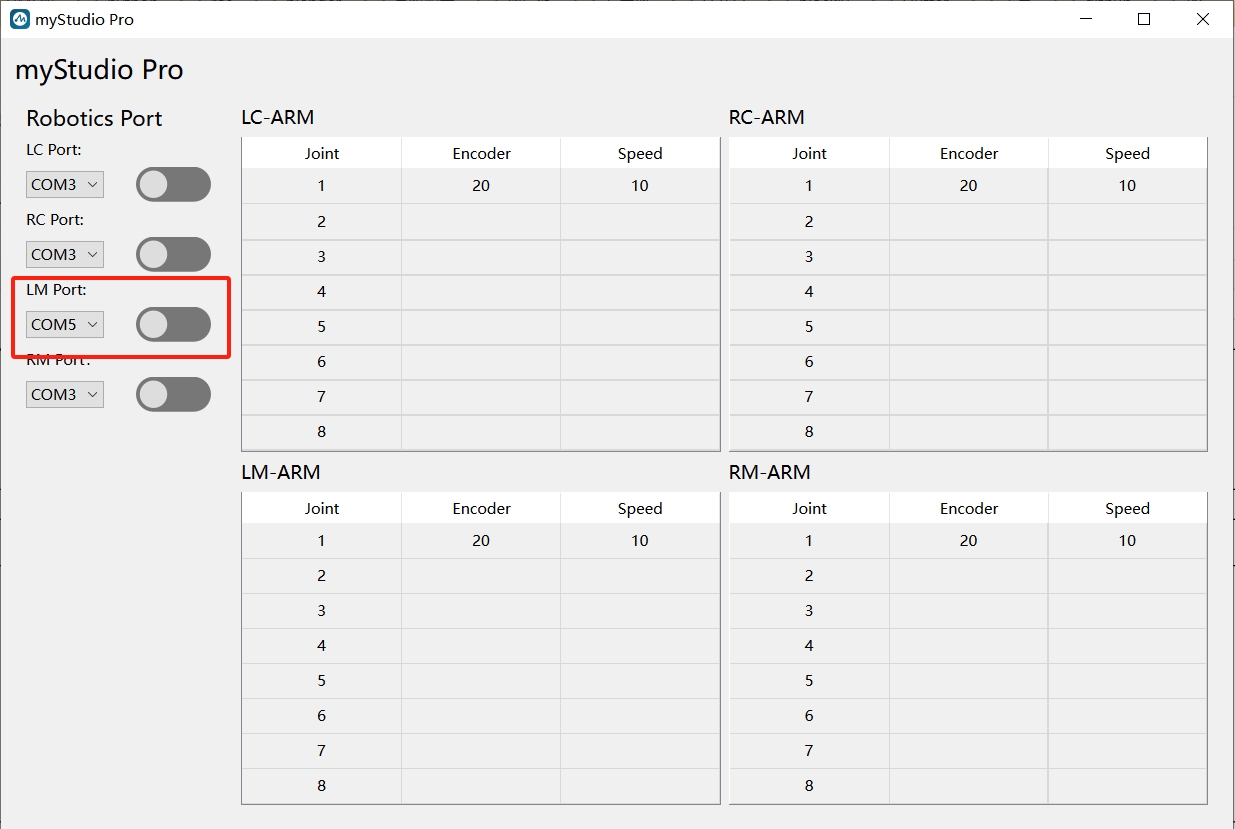
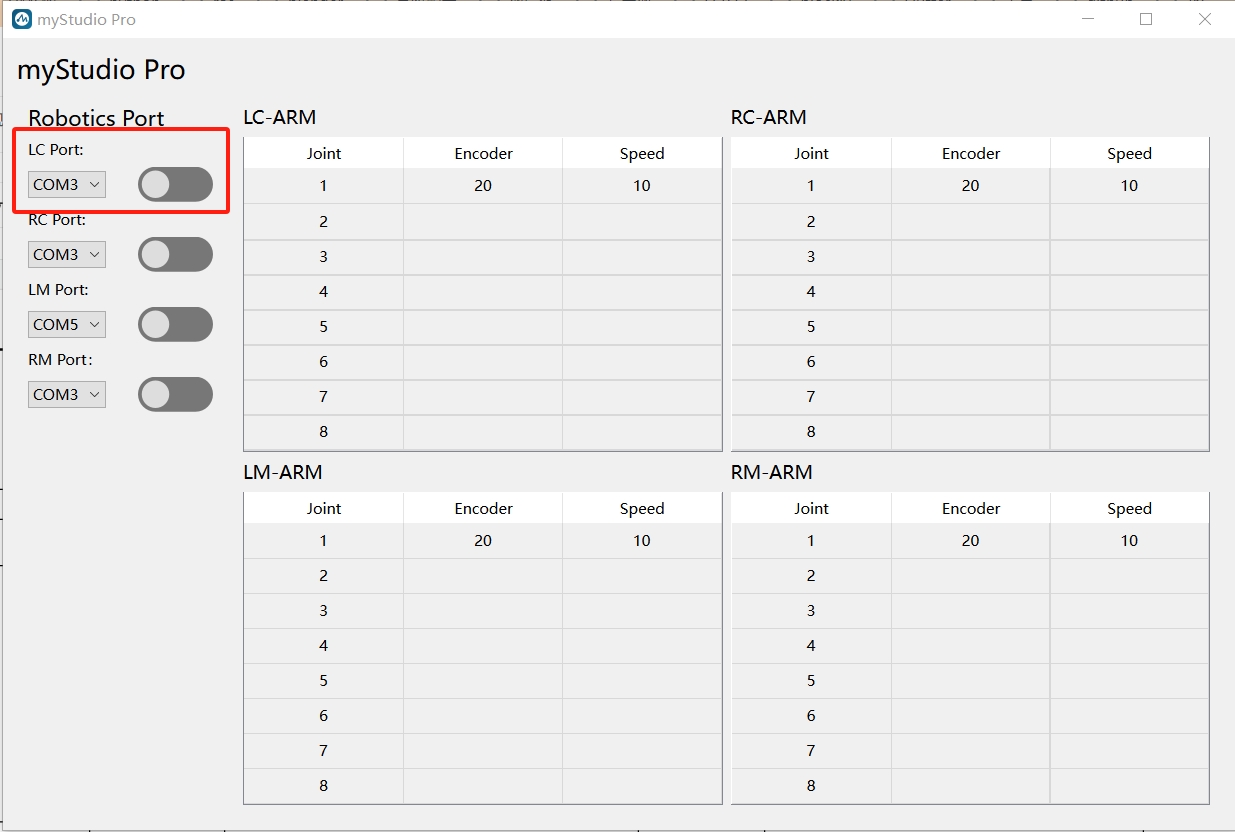
After both serial ports are enabled, you can control the movement of myArmM by moving myArmC.