Q&A
This chapter lists common issues when using myBlockly to control a robotic arm for your reference.
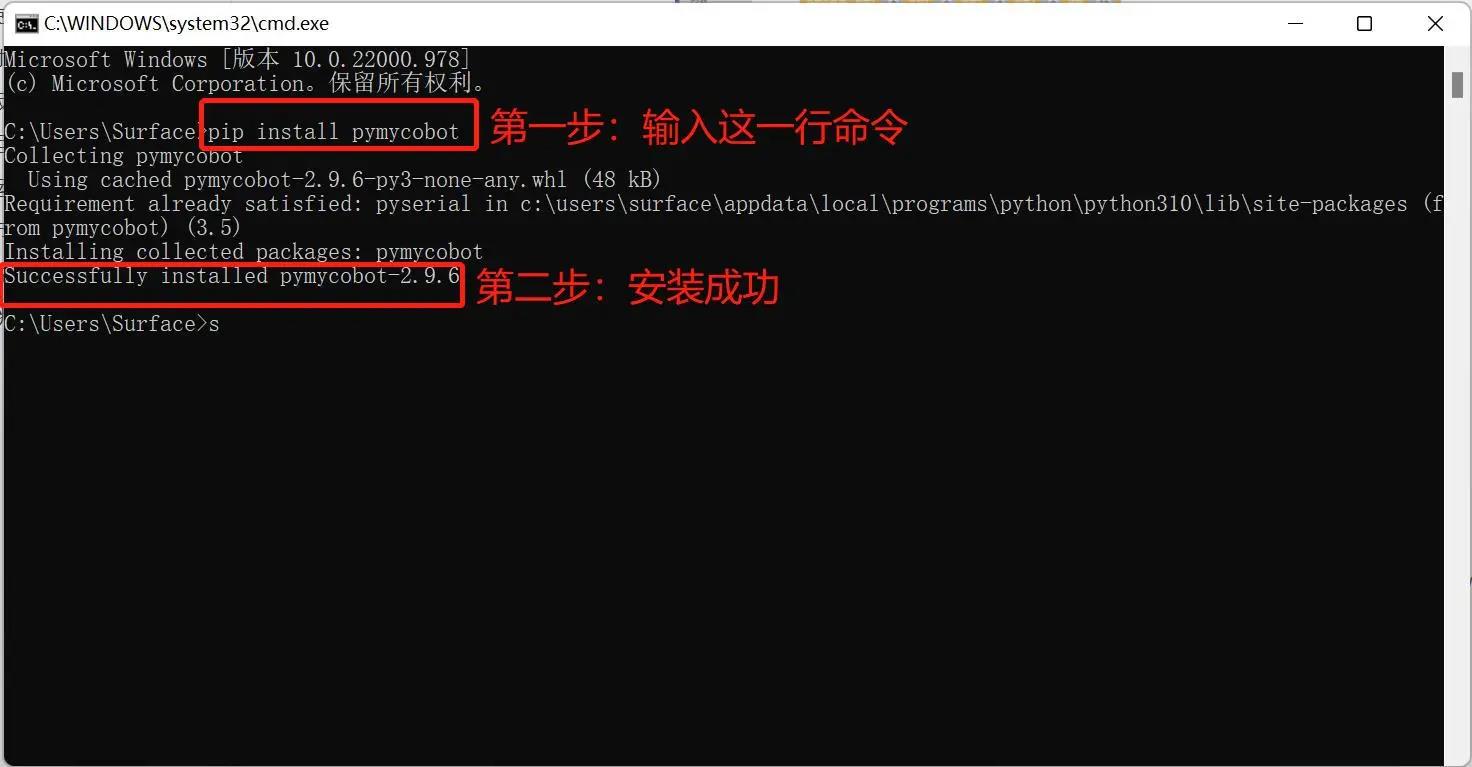
Q1: When running myBlockly, I get the error message ModuleNotFoundError: No module named 'pymycobot'
A: This is because the pymycobot library was not installed when setting up the Python environment. To install the pymycobot library, open Terminal (Win + R), enter pip install pymycobot --upgrade --user, and press Enter. You should see "Successfully installed pymycobot."
Q2: The robot arm is unresponsive because the sleep method module is not added
A: The program that operates the robot arm takes a certain amount of time to complete. Therefore, after completing each movement, you need to connect a sleep module to allow the robot arm sufficient time before performing the next movement. (The required time depends on the specific situation and machine. The default setting for the robot arm is to sleep for at least 0.5 seconds when running myBlockly.) Otherwise, the robot arm will not be able to perform the desired movement.
Q3: SSH cannot connect
A: This situation is usually caused by a poor network cable connection. You can first unplug the network cable on the PC and then reconnect it. When the control panel detects a connection (usually Ethernet),then open the Windows Command Prompt and use the ping command to check. When the output information is normal, try the SSH connection. If the above steps fail to solve the problem, try restarting the machine and then operate again.
Q4: Can't open after entering the IP address?
A: Make sure the PC and the robot arm are on the same local area network. Try changing the browser (Chrome or Edge is recommended). Refresh the cache (Ctrl+F5).