Using The Gripper
Before You Begin
1. Ensure the machine is powered on
2. Ensure the machine is properly connected
3. Enable the server
This chapter describes how to use Blockly to control the Pro Force Gripper connected to a robotic arm.
API Display
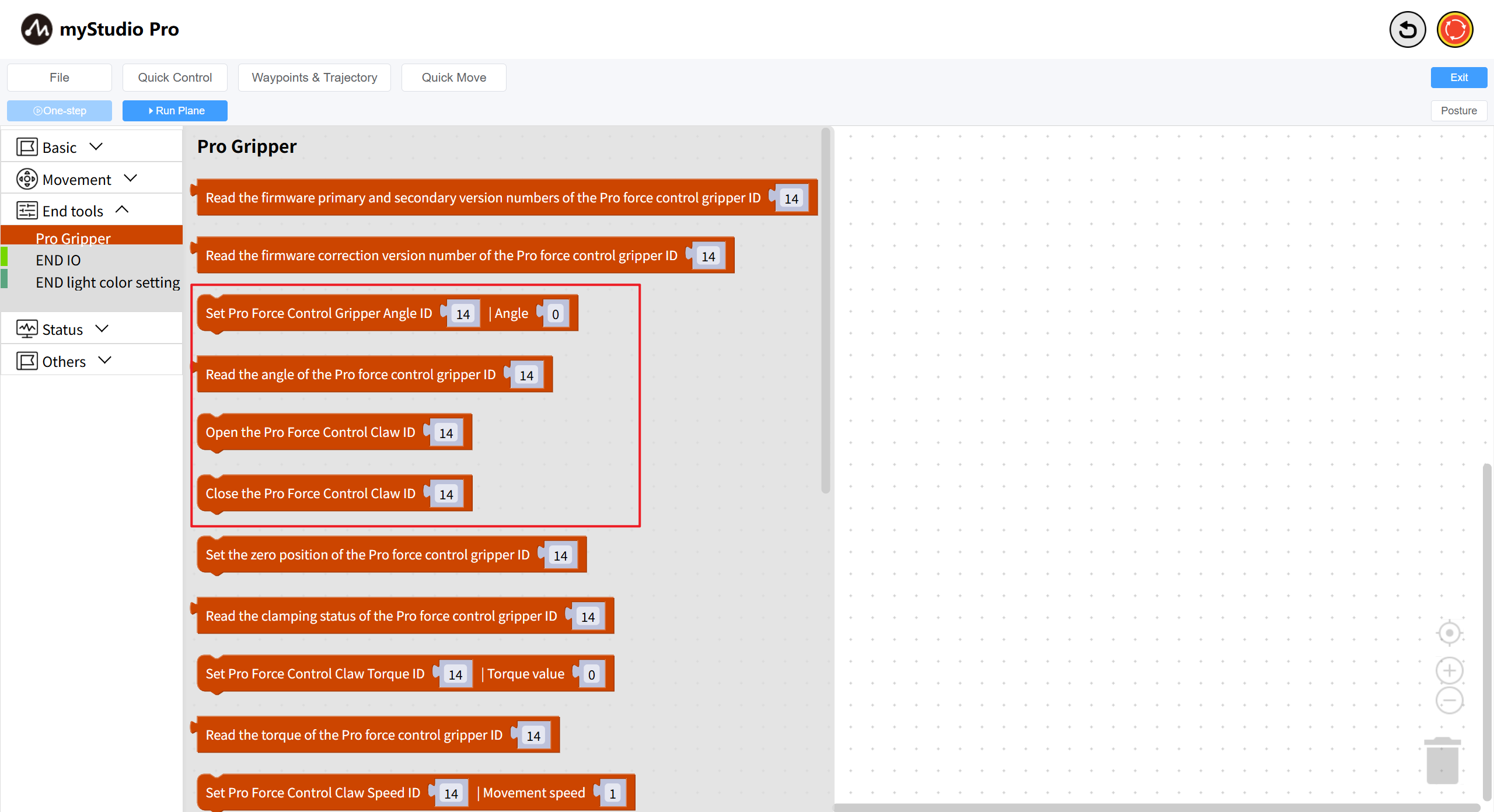
We will use the following blocks.
1: Set Pro Force Control Gripper Angle: Sets the gripper to a specific state (open or closed) at a specified angle.
Parameter Description:
This block has two adjustable parameters:
- Gripper ID parameter: Default is 14
- Gripper Angle parameter: Indicates the desired angle, with a range of 0 to 100.
2: Read Pro Force Control Gripper Angle: Reads the current gripper angle.
This block has one adjustable parameter:
- Gripper ID parameter: Default is 14
Small Example
The graphic code is as follows:
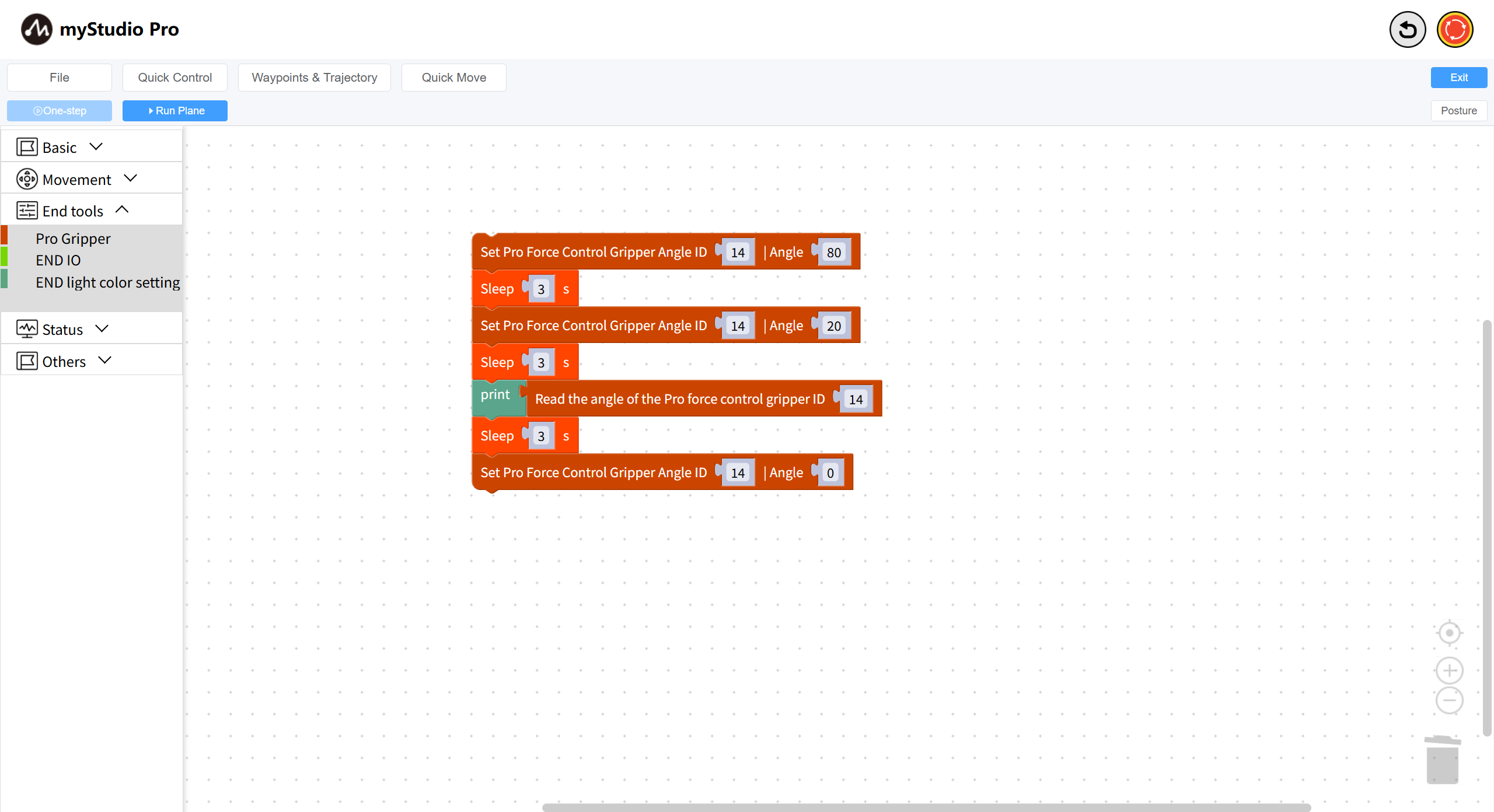
Code execution results:
- Controls the Pro force-controlled gripper to a value of
80degrees - Waits for 3 seconds
- Controls the Pro force-controlled gripper to a value of
20degrees - Waits for 3 seconds
- Reads the current angle of the Pro force-controlled gripper
- Waits for 3 seconds
- Controls the Pro force-controlled gripper to a value of
0degrees Note:
If you are unable to control the gripper from the example above, please ensure that your Pro Force Control Gripper is using the Modbus protocol.
After completing this configuration, run the example code again.