Program Control
Before You Begin
1. Ensure the robot is powered on
2. Ensure the robot server is running
3. Ensure the robot is at zero position
This chapter introduces how to debug block code through the Run Panel and implement Pause, Resume, Single Step, and Stop of the program.
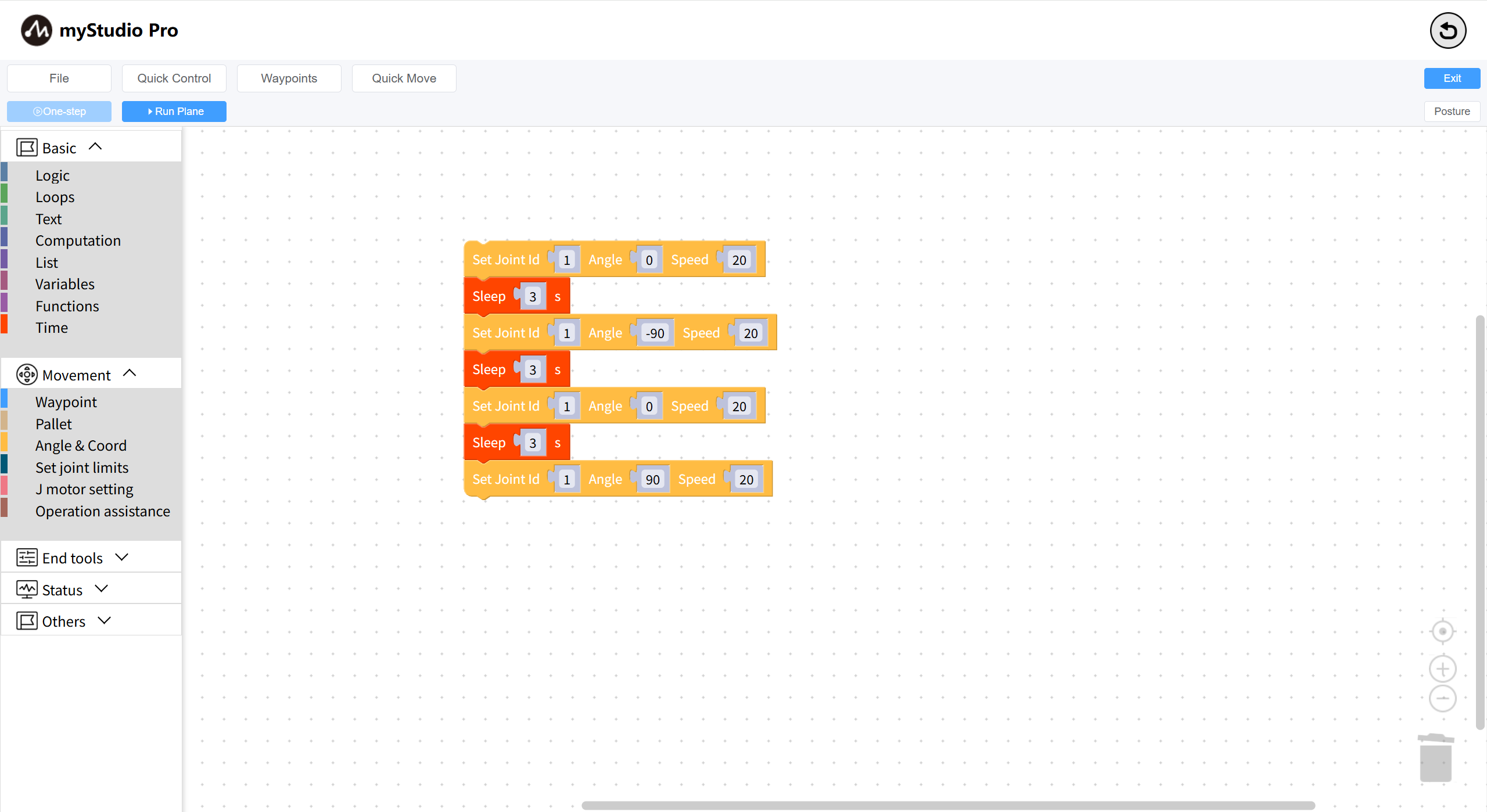
Edit a program to control the movement of joint 1 of the robot arm
Click the Run Panel button. When the Run Panel pops up, click Run All and then immediately click the Pause button. The program will pause after executing the first instruction mc.send_angle(1,0,20).
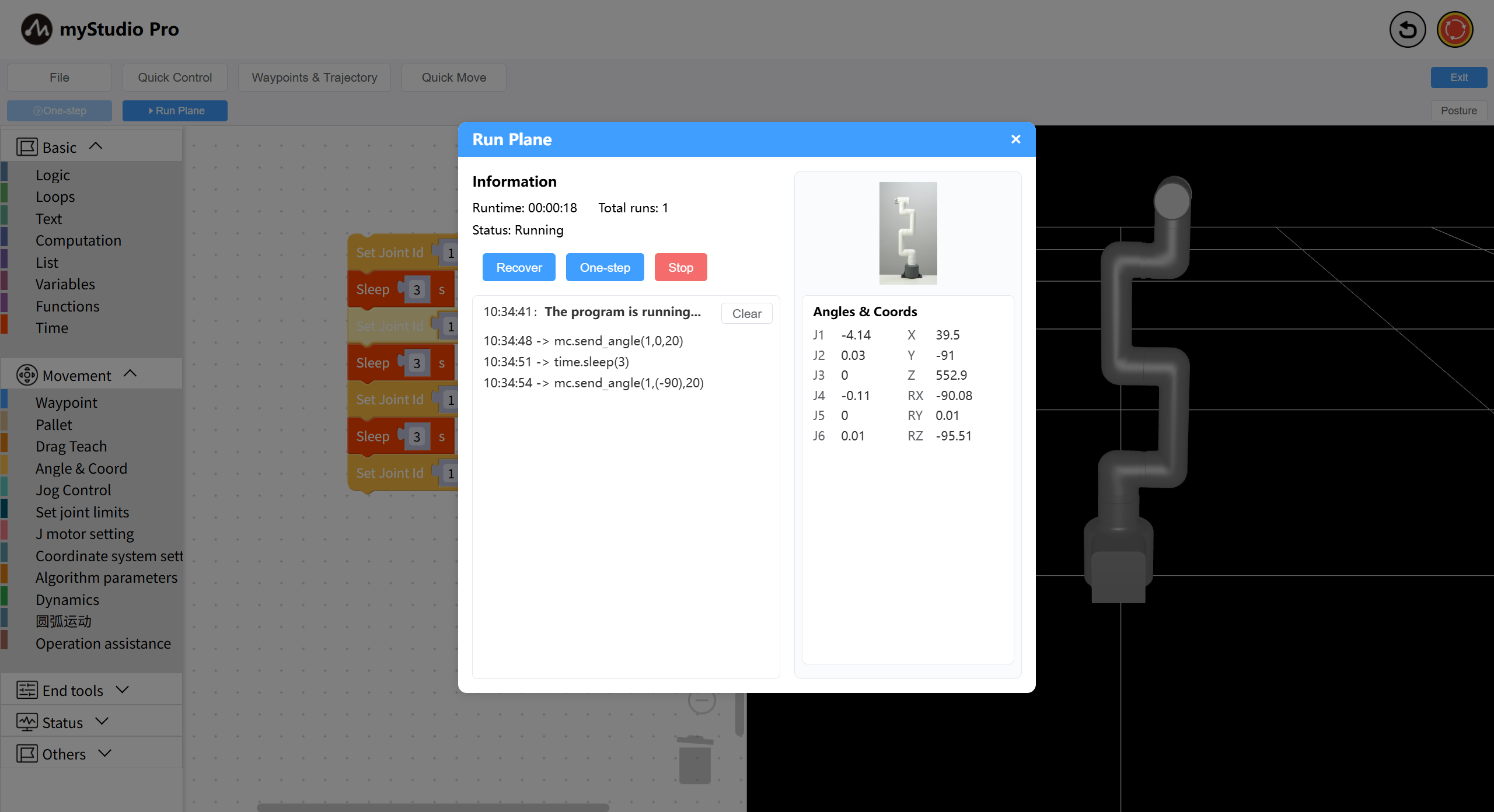
The program is paused. The next instruction to be executed, time.sleep(3), appears.
At this point:
- If you click the
Resumebutton, the program will automatically continue execution. - If you click the
Step Intobutton, the program will execute the next instruction,mc.send_angle(1,-90,20). - If you click the
Stopbutton, the program will terminate.
As for what to do next, it’s up to you!