Arduino 简单使用
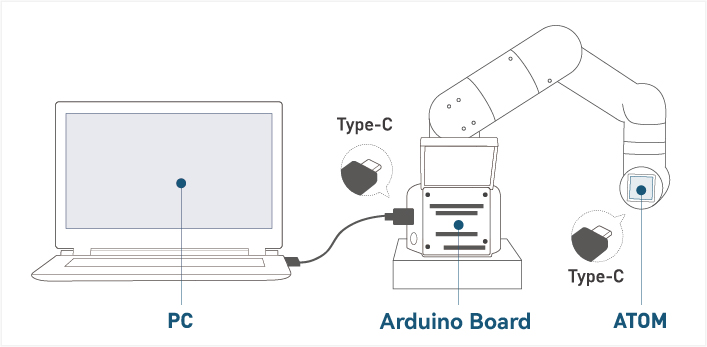
1.连接设备
以 myCobot 280-Arduino 为例,用合适的数据线链接机械臂和开发板以及 PC 端。
2.固件要求
- ATOM :使用 MyStudio 烧录最新版 AtomMain(末端的atom为算法储存运算终端,不可开发,只能使用本公司固件)
3.检测链接
打开电脑设备管理器查看有无设备。如未检测到设备,请更换USB连接线,如果显示无法使用,请安装点击下载 CP210X 驱动(参考5.2软件使用说明) ,下载完成后解压并安装所需的驱动版本即可使用。
打开 Arduino IDE -->工具 --> 端口 查看有无设备。如未检测到设备,请更换USB连接线测试,或检测驱动是否安装成功。
4.开发前的注意事项
编译前的修改
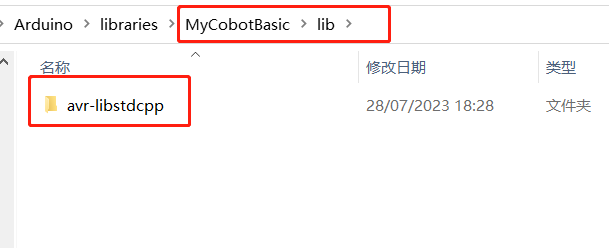
导入库文件,如果您的机械臂是myCobot280-Arduino,请检查接入的开发板是否为Mega2560或者Uno,如果是:
1.1 请将MyCobotBasic\lib\avr-libstdcpp放到C:\Users\User\Documents\Arduino\libraries下:

编译前开发板的选择
若使用的开发板为Uno、Mega2560, 请进行以下步骤:
工具 --> 开发板 --> Arduino AVR Boards --> Arduino Uno(或者Arduino MEAG or Mega2560),具体可看下图:

1 使用 uno 时,选择1
2 使用Mega2560时,选择2
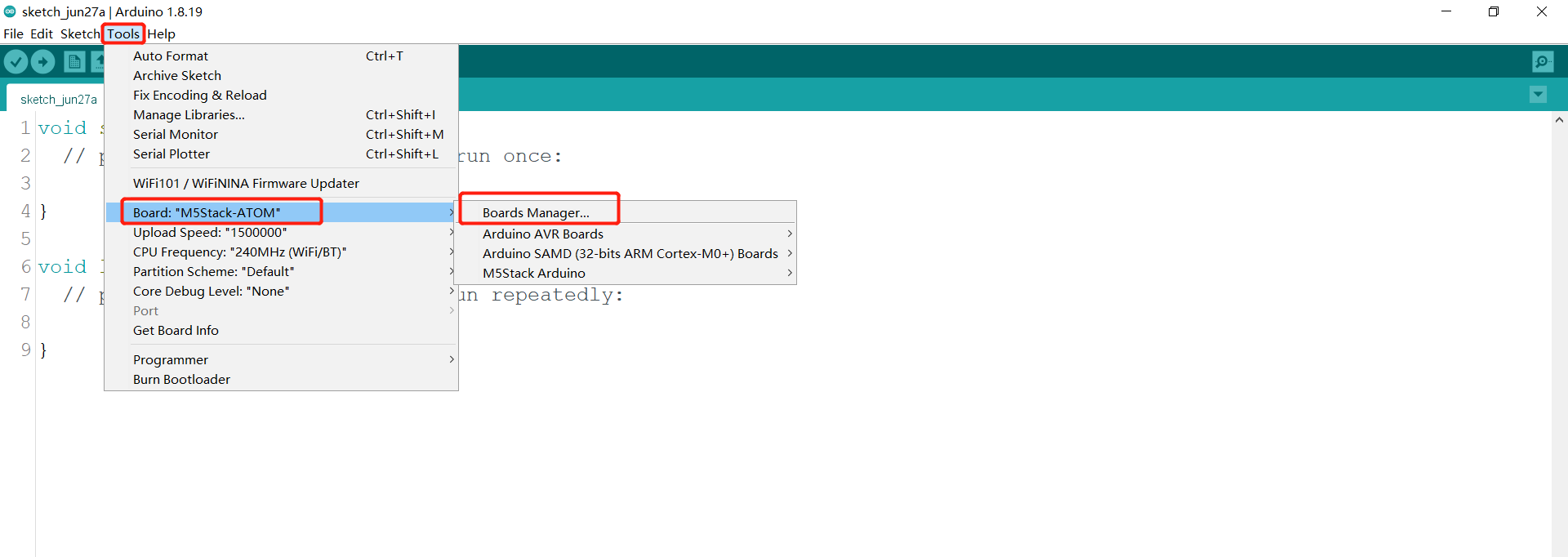
若使用的开发板为mkr wifi1010,请进行以下步骤:
开发板管理器搜索samd,如果没有安装,就安装,首先工具 --> 开发板 --> 开发板管理器,然后搜索samd,具体可看下图:

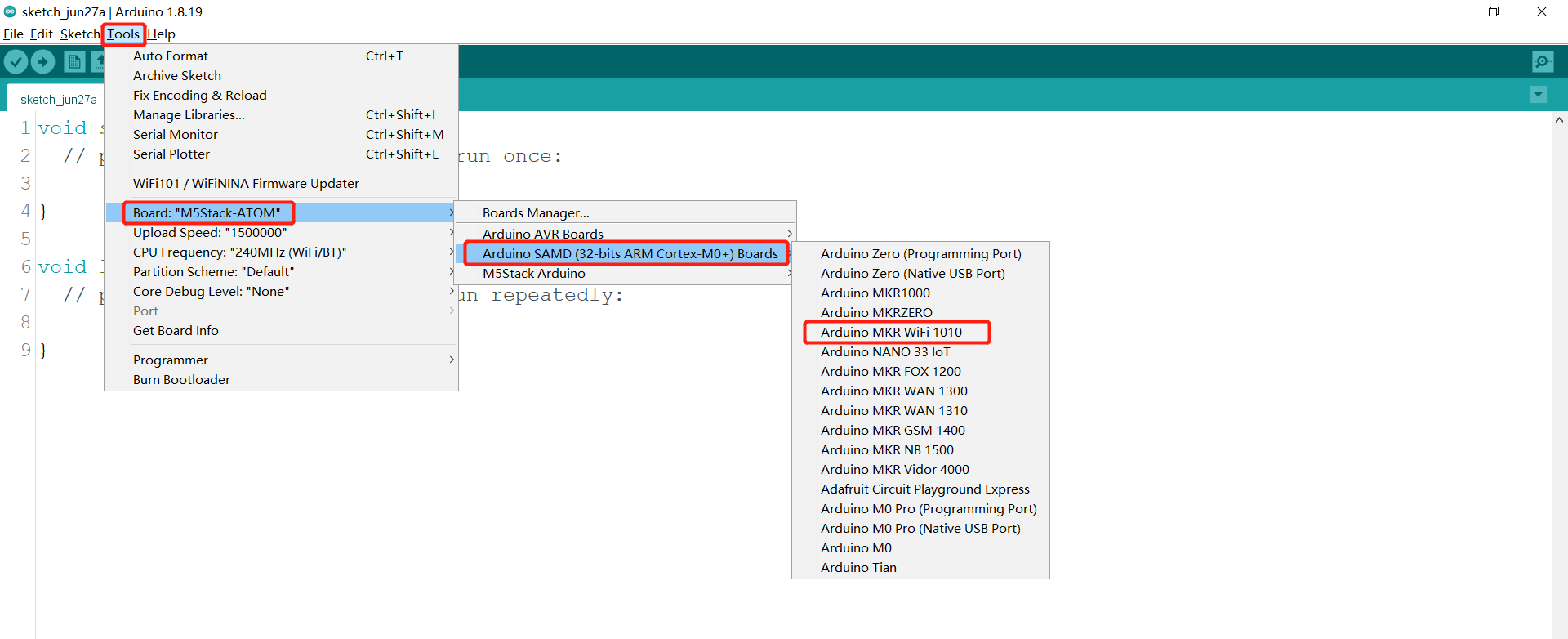
开发板选择mkr wifi1010,工具 --> 开发板 --> Arduino SAMD --> Arduino MKR WiFi1010
4.开始开发
以烧录一个官方 demo 为例,打开 Arduino IDE --> 文件 --> 示例--> MyCobotBasic 就可以看到所有的项目示例(如果未看到示例,可以将Arduino重启)。选择烧录一个简单的 demo , 例如 --> MyCobot280--> MyCobot280-M5--> AnglesControl 。
从示例文件中打开AnglesControl.ino
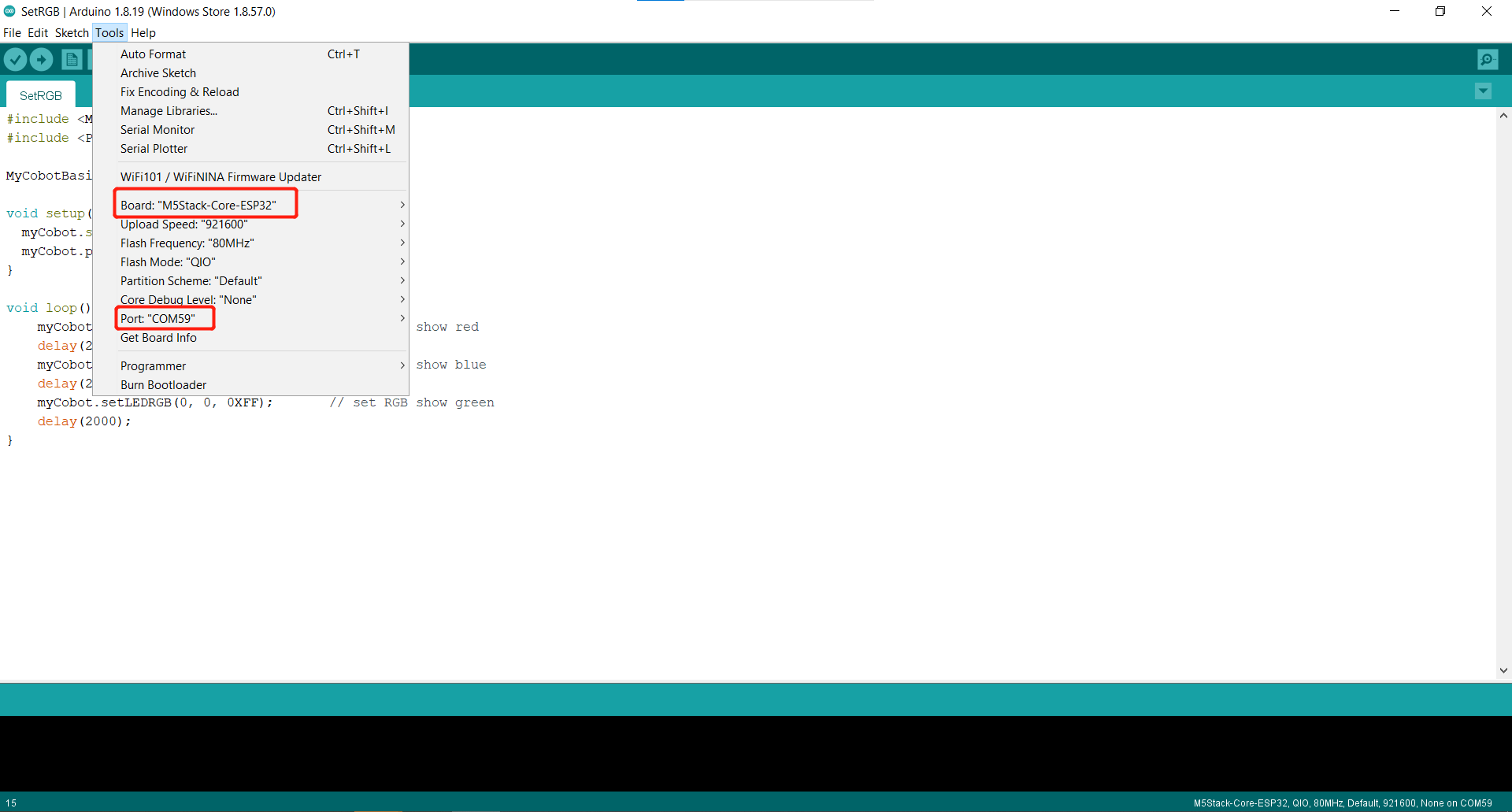
注意: 选择开发板为 M5Stack-Core-ESP32 和对应的 COM口 。
如果您使用的是myCobot280-M5,请使用MyCobot280-M5文件夹下的ParameterList.h,替换掉MyCobotBasic文件夹下的ParameterList.h,具体请看下图:
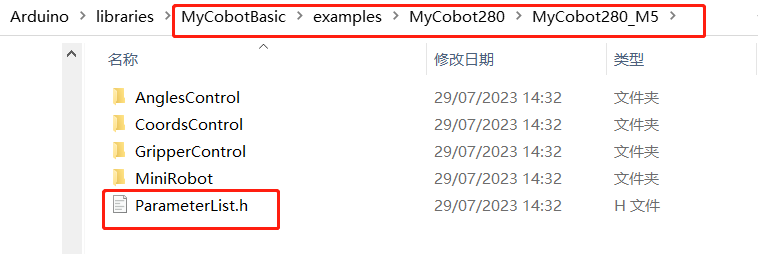
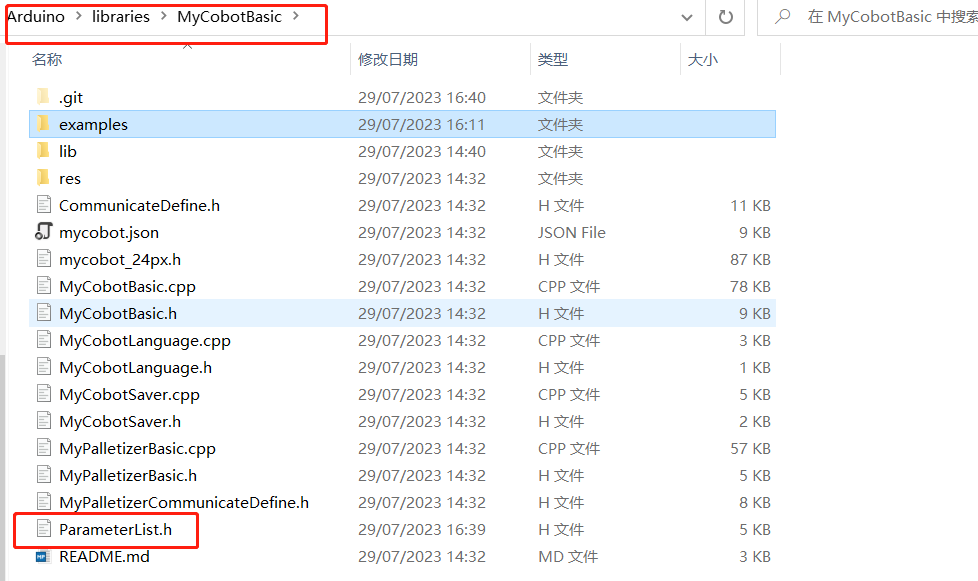
注意: 使用不同机型时,请使用各自案例目录下的"ParameterList.h"文件替换"MyCobotBasic\ParameterList.h"文件
点击上传并等待右下方进度条跑完
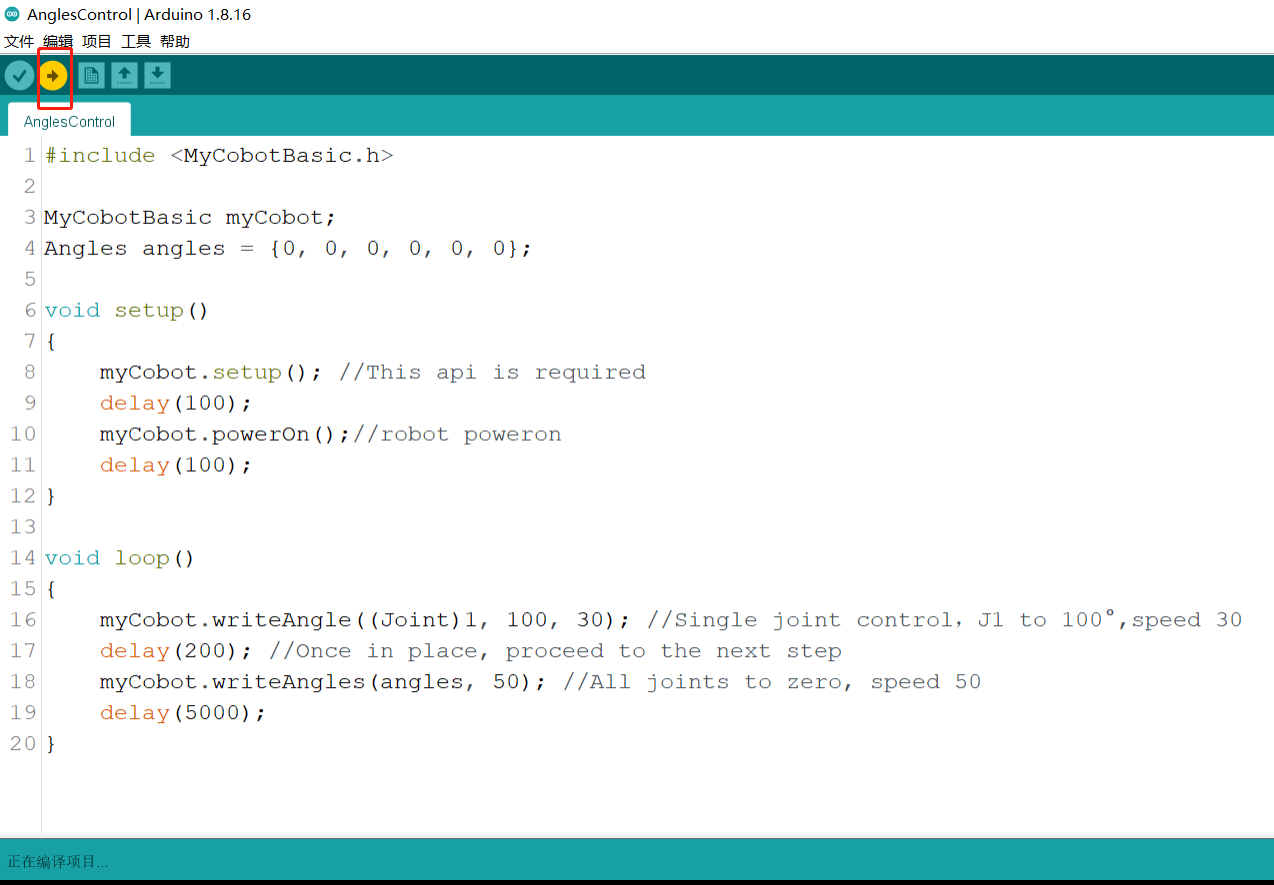
等待直到右下方显示上传成功,程序就已经下载完成
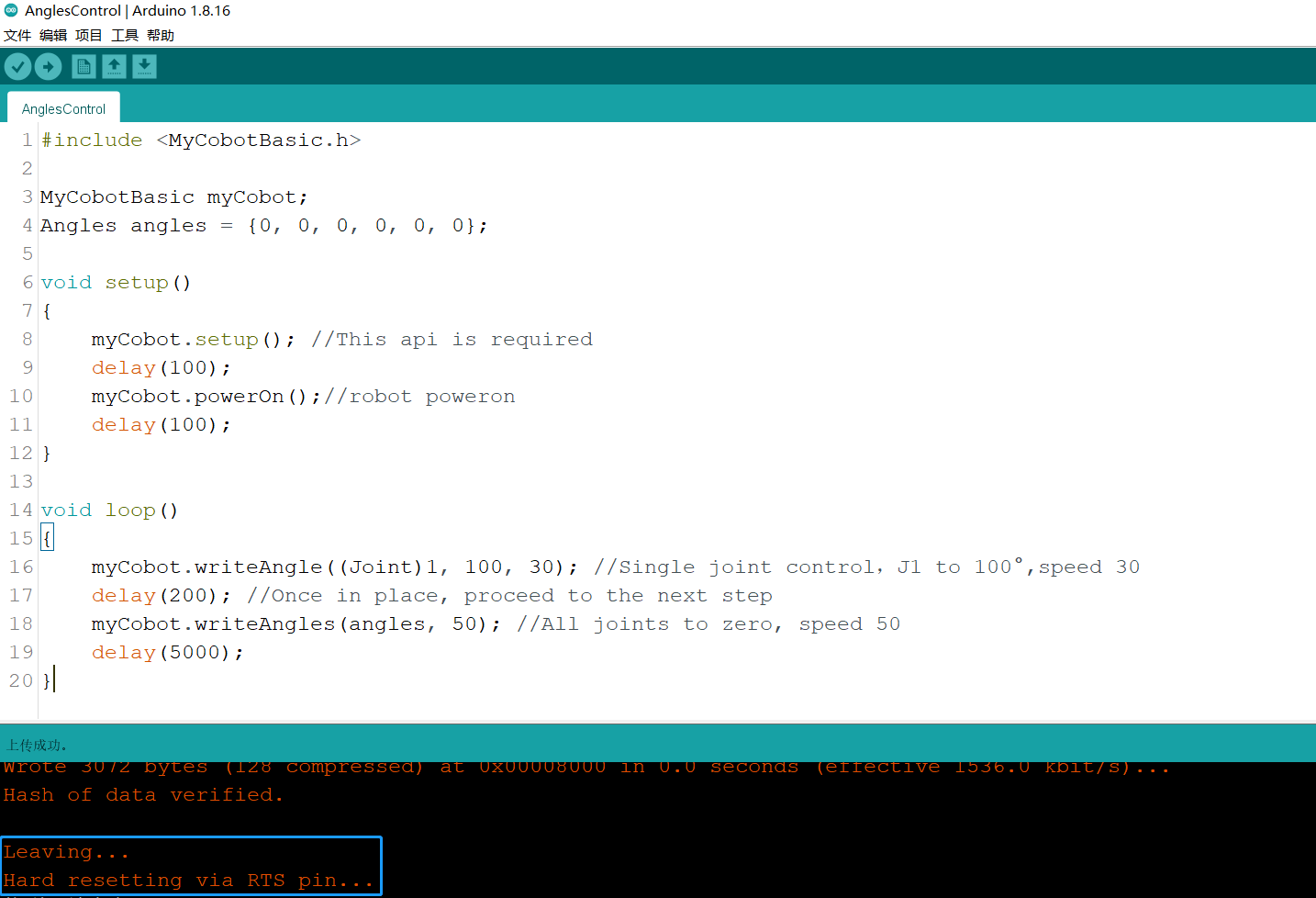
这时我们就能看到 机器人 开始工作。
5.部分案例介绍
目前不同机型都有角度、坐标、夹爪控制。
Transponder:
myCobot280-Arduino uno和Mega2560开发板使用案例,功能主要是通讯,在此基础上,使用RoboFlow、python、myblockly等控制机械臂,进行io控制。
AnglesControl:
这个demo是用于控制机械臂关于其关节的角度控制。
CoordsControl:
这个demo是用于控制机械臂关于其关节角度控制和坐标控制。
GripperControl:
这个demo是用于控制一个名为MyCobot的机械臂的夹爪(gripper)的开合动作以及角度的。
Transponder案例说明: 串口通信初始化与设置:在 setup 函数中,程序初始化了串口通信,并开启了 MyCobot 机械臂的电源。 数据包处理:在 loop 函数中,程序会不断调用相关函数来处理从客户端到 Atom(机械臂控制器)的数据、从 Atom 返回的数据,以及处理其他未被 Atom 处理的消息。 数据包校验:checkHeader 和 HandleStickyPackets 函数用于校验数据包的完整性和正确性。 处理 IO 引脚控制的命令:HandleOtherMsg 函数处理设置和读取 IO 引脚状态的命令。 数据传输:SendDataToUser 函数负责将 Atom 返回的数据包传回给用户。 数据缓冲管理:程序通过缓冲区管理数据的收发,并在特定条件下清理数据。
#include <MyCobotBasic.h> // 包含 MyCobot 机械臂的基本库文件
#include <vector> // 包含标准库中的 vector 容器
#define SET_BASIC_OUT 0xa0 // 定义用于设置 IO 输出的指令代码
#define GET_BASIC_IN 0xa1 // 定义用于获取 IO 输入的指令代码
byte HEADER = 0xfe; // 定义数据包的起始字节
byte FOOTER = 0xfa; // 定义数据包的结束字节
using namespace std;
vector<int> client_data; // 用于存储从客户端接收到的数据
vector<int> temp_data; // 用于临时存储处理中的数据
vector<int> atom_data; // 用于存储从 Atom 返回的数据
int count = -1, data = -1; // 初始化计数器和数据变量
int t_begin; // 定义时间变量,用于计算延时
void setup()
{
Serial.begin(115200); // 初始化主串口,波特率为 115200
Serial1.begin(1000000); // 初始化辅助串口,波特率为 1000000
delay(100); // 延时 100 毫秒
MyCobotBasic myCobot; // 实例化 MyCobotBasic 类
delay(500); // 延时 500 毫秒
myCobot.powerOn(); // 开启 MyCobot 机械臂电源
delay(500); // 延时 500 毫秒
pinMode(15, OUTPUT); // 将引脚 15 设置为输出模式
pinMode(5, OUTPUT); // 将引脚 5 设置为输出模式
pinMode(2, OUTPUT); // 将引脚 2 设置为输出模式
}
void loop()
{
ClientDataToAtom(); // 将客户端数据发送给 Atom
AtomDataToClient(); // 将 Atom 返回的数据发送给客户端
OtherMsgToClient(); // 处理其他未被 Atom 处理的消息
ClearData(); // 清理数据缓存
}
/*
* 检查串口 wifi 或蓝牙返回消息的头部是否为 0xfe 0xfe
*/
bool checkHeader(vector<int> &v_data)
{
if (v_data[0] == HEADER && v_data[1] == HEADER) // 如果数据包的前两个字节为 HEADER
return true; // 返回 true 表示头部正确
return false; // 否则返回 false
}
bool HandleStickyPackets(vector<int> &v_data)
{
// 获取协议的长度以判断结束符是否为 0xfa
vector<int>::iterator it_vdata = v_data.begin() + 2 + v_data[2];
int len = v_data.size(); // 获取数据包的长度
// 首先判断长度是否小于 5,指令长度至少为 5
if (len >= 5 && len <= (v_data[2] + 3)) { // 如果数据包的长度合法
if (*it_vdata == FOOTER) { // 如果结束符为 FOOTER
v_data.erase(it_vdata + 1, v_data.end()); // 删除多余的数据
return true; // 返回 true 表示数据包正确
}
}
return false; // 返回 false 表示数据包有问题
}
/*
* 处理 Atom 没有处理的一些客户端消息
*/
bool HandleOtherMsg(vector<int> &v_data)
{
bool flag = false; // 初始化标志位
switch (v_data[2]) { // 根据指令的第三个字节选择处理流程
case 4:
switch (v_data[3]) {
case SET_BASIC_OUT: { // 如果指令是设置 IO 输出
byte pin_no = v_data[4]; // 获取需要设置的引脚编号
pinMode(pin_no, OUTPUT); // 将该引脚设置为输出模式
delay(5); // 延时 5 毫秒
bool pin_data = v_data[5]; // 获取需要设置的引脚状态
digitalWrite(pin_no, pin_data); // 设置引脚输出高低电平
}
break;
}
break;
case 3:
switch (v_data[3]) {
case GET_BASIC_IN: { // 如果指令是获取 IO 输入
byte pin_no = v_data[4]; // 获取需要读取的引脚编号
pinMode(pin_no, INPUT); // 将该引脚设置为输入模式
delay(5); // 延时 5 毫秒
bool pin_state = digitalRead(pin_no); // 读取引脚的输入状态
delay(5); // 延时 5 毫秒
v_data[2] = 0x04; // 修改指令长度
v_data.insert(v_data.end() - 1, pin_state); // 将引脚状态添加到数据包中
flag = true; // 设置标志位为 true
}
break;
}
break;
}
return flag; // 返回标志位
}
/*
* 将 Atom 返回的消息发送给用户
*/
void SendDataToUser(vector<int> &v_data)
{
if (checkHeader(v_data) && HandleStickyPackets(v_data)) { // 如果数据包头部正确且数据包处理成功
if (HandleOtherMsg(v_data)) { // 处理可能的 IO 引脚命令
for (int i = 0; i < v_data.size(); i++) { // 将数据包逐字节发送给用户
Serial.write(v_data[i]);
}
}
v_data.clear(); // 清空数据包
}
return;
}
void ClientDataToAtom()
{
if (Serial.available() > 0) { // 如果主串口有可用数据
count = 1;
while (Serial.available() > 0) { // 读取主串口的数据
data = Serial.read(); // 读取一个字节的数据
Serial1.write(data); // 将数据发送给 Atom
client_data.push_back(data); // 将数据存储在 client_data 缓存中
}
t_begin = millis(); // 记录当前时间
}
}
void AtomDataToClient()
{
int temp;
bool flag = false;
if (Serial1.available() > 0) { // 如果辅助串口有可用数据
count = 0;
while (Serial1.available() > 0) { // 读取辅助串口的数据
data = Serial1.read(); // 读取一个字节的数据
if (data == HEADER && (temp = Serial1.read()) == HEADER) { // 如果读到数据包的头部
Serial.write(temp); // 将数据发送给用户
flag = true; // 设置标志位
}
if (flag) {
Serial.write(data); // 将数据发送给用户
}
}
}
}
void OtherMsgToClient()
{
if (count == 1 && ((millis() - t_begin) > 10)) { // 如果客户端数据传输结束并且超过 10 毫秒
count = 0; // 重置计数器
for (int i = 0; i < client_data.size(); i++) { // 将 client_data 中的数据复制到 temp_data 中
temp_data.push_back(client_data[i]);
}
SendDataToUser(temp_data); // 将数据发送给用户
}
}
void ClearData()
{
if (count == 0){ // 如果计数器为 0
client_data.clear(); // 清空 client_data 缓存
}
}
AnglesControl案例说明
该示例程序主要实现了以下功能:
- 初始化 MyCobot 机械臂并上电。
- 在循环中控制机械臂的第一个关节(Joint 1)旋转到指定角度,并设置运动速度。
- 在设置完第一个关节角度后,控制所有关节归零,并设置归零过程的速度
#include <MyCobotBasic.h>
MyCobotBasic myCobot;
Angles angles = {0, 0, 0, 0, 0, 0};
void setup()
{
myCobot.setup(); //This api is required
delay(100);
myCobot.powerOn();//robot poweron
delay(100);
}
void loop()
{
myCobot.writeAngle((Joint)1, 100, 30); //Single joint control,J1 to 100°,speed 30
delay(200); //Once in place, proceed to the next step
myCobot.writeAngles(angles, 50); //All joints to zero, speed 50
delay(5000);
}
CoordsControl案例说明:
该程序实现了以下功能:
- 初始化 MyCobot 机械臂并上电。
- 设置机械臂初始姿态。
- 在主循环中,首先将机械臂的 X 轴坐标移动到 30mm 的位置。
- 随后,将机械臂的坐标设置为预定义的
coords值,即指定的六个坐标轴位置。
#include <MyCobotBasic.h> // 引入 MyCobotBasic 库,用于控制 MyCobot 机械臂
MyCobotBasic myCobot; // 创建 MyCobotBasic 对象,用于后续控制机械臂
Coords coords = {194.700, -67.400, 131.300, -177.260, -3.760, -110.880};
// 初始化一个 Coords 结构体,定义机械臂的目标坐标系位置(包括 X, Y, Z 位置和姿态角)
void setup()
{
myCobot.setup(); // 初始化 myCobot 对象(必须调用该函数)
delay(100); // 延迟 100 毫秒,等待初始化完成
myCobot.powerOn(); // 为机械臂上电,准备开始控制
delay(100); // 延迟 100 毫秒,等待机械臂上电
myCobot.writeAngles({0, -10, -123, 45, 0, 20}, 50);
// 设置机械臂的初始姿态,具体角度为 {J1, J2, J3, J4, J5, J6},速度为 50
delay(6000); // 延迟 6000 毫秒,等待机械臂移动到指定初始姿态
}
void loop()
{
myCobot.writeCoord((Axis)1, 30, 30); // 控制机械臂的 X 轴坐标移动到 30mm,速度为 30
delay(300); // 延迟 300 毫秒,等待 X 轴移动到指定位置
myCobot.writeCoords(coords, 30); // 设置机械臂的坐标为预定义的 `coords` 值,速度为 30
delay(5000); // 延迟 5000 毫秒,等待机械臂移动到指定坐标位置
}
GripperControl案例说明:
该程序实现了以下功能:
- 初始化 MyCobot 机械臂并上电。
- 在主循环中,按顺序控制夹爪的位置和状态,包括夹爪张开、闭合和指定角度的控制。
#include <MyCobotBasic.h> // 引入 MyCobotBasic 库,用于控制 MyCobot 机械臂
MyCobotBasic myCobot; // 创建 MyCobotBasic 对象,用于后续控制机械臂
void setup()
{
myCobot.setup(); // 初始化 myCobot 对象(必须调用该函数)
delay(100); // 延迟 100 毫秒,等待初始化完成
myCobot.powerOn(); // 为机械臂上电,准备开始控制
delay(100); // 延迟 100 毫秒,等待机械臂上电
}
void loop()
{
myCobot.setGripperValue(80, 50); // 将夹爪移动到 80°,速度为 50
delay(500); // 延迟 500 毫秒,等待夹爪移动到指定角度
myCobot.setGripperValue(20, 50); // 将夹爪移动到 20°,速度为 50
delay(500); // 延迟 500 毫秒,等待夹爪移动到指定角度
myCobot.setGripperState(0, 30); // 打开夹爪,速度为 30
delay(600); // 延迟 600 毫秒,等待夹爪完全打开
myCobot.setGripperState(1, 30); // 关闭夹爪,速度为 30
delay(600); // 延迟 600 毫秒,等待夹爪完全关闭
}