柔性夹爪 - 张脚式
适配型号: myCobot 280、myPalletizer 260、mechArm 270、myBuddy 280
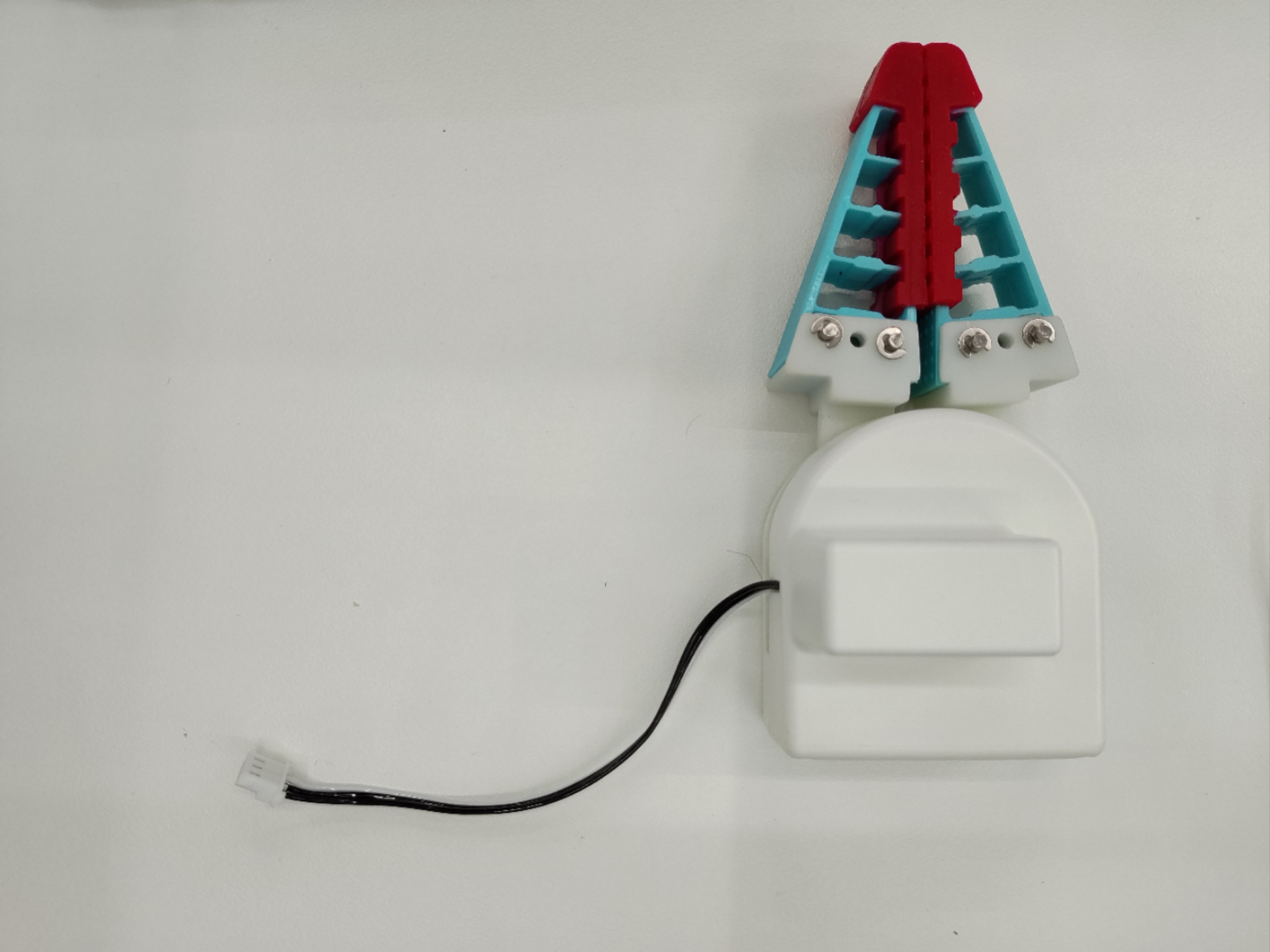
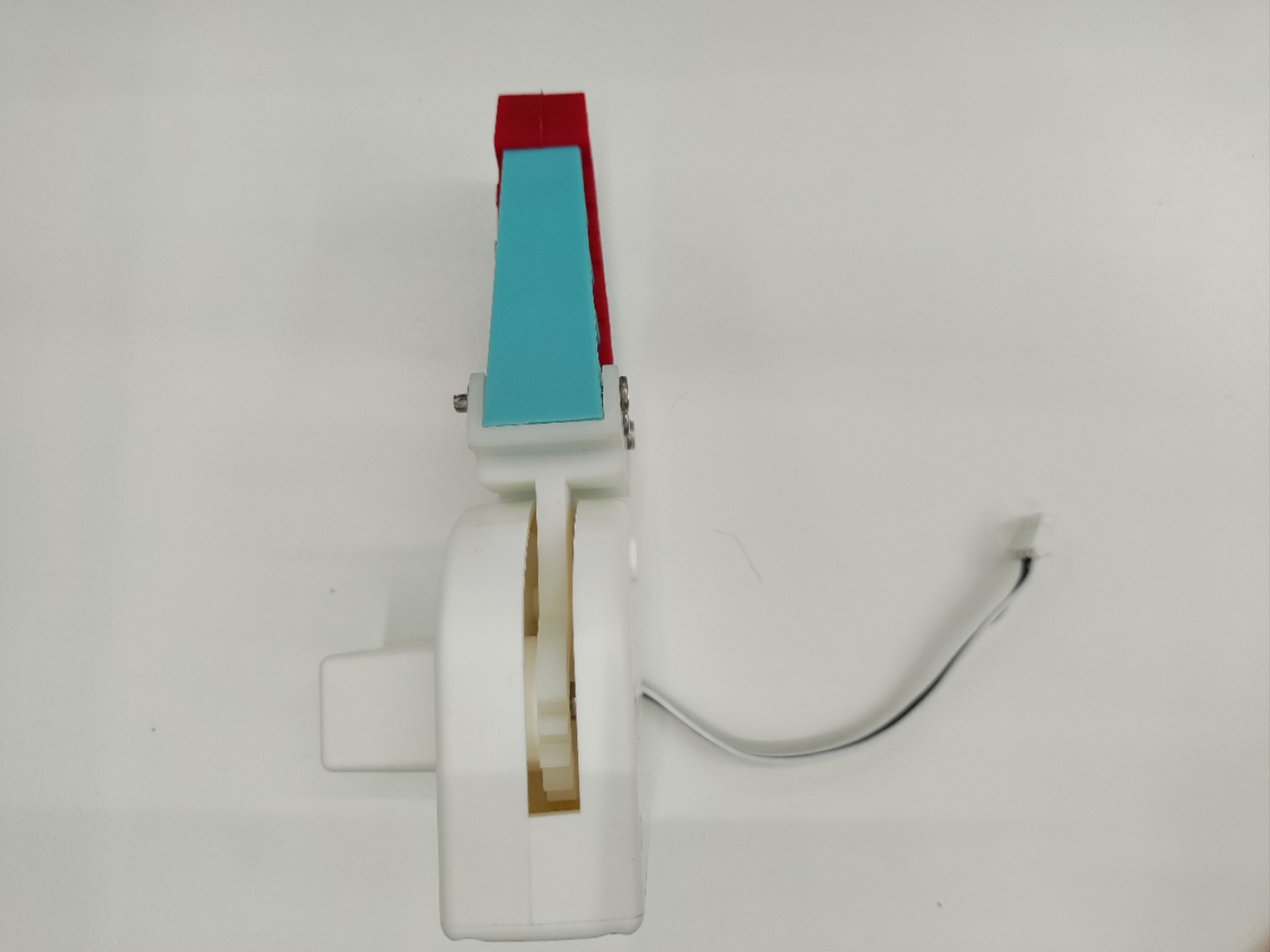
产品图示
规格说明:
| 名称 | mycobot280 张角式夹爪 |
|---|---|
| 型号 model | myCobot 张角式夹爪 |
| 工艺 | 光敏树脂 |
| 颜色 | 白色 |
| 重复精度 | ±1mm |
| 使用寿命 | 一年 |
| 驱动方式 | 电动 electric |
| 固定方式 | 乐高连接件 |
| 使用环境要求 | 常温常压 |
| 控制接口 | 串口控制 |
| 适用设备 | ER myCobot 280 系列 ,ER myPalletizer 260 系列, ER mechArm 270 系列 ,ER myBuddy 280 系列 |
柔性夹爪: 夹取物体使用
简介
- 传统工业吸盘需要吸取物料的平整表面,在越来越多的工况中,吸取表面容易损伤面板或元器件,柔触夹爪捏边抓取,轻松无痕无损搬运面板,确保产品表面无瑕疵,提升良品率。
- 柔触夹爪的模块化设计,自重轻,可以按照面板尺寸自由排列组合。
- 传统气缸的夹持力普遍较大,且力度难以控制,夹持面板的边缘容易夹伤夹翘,柔性夹爪的单指夹持力精准可控,不会夹伤脆弱工件。
工作原理
- 柔性夹爪是研究人员模仿海星腕足的形态,研发出的一种创新型仿生柔性夹具。软爪的“手指”是由高分子硅胶柔性材料制作而成,通过充气实现弯曲形变,能够像海星一样,自适应地包覆住目标物体,可完成对异形、易损物品的柔性、无损抓取 。
适用物体
- 合理大小内的任意形状物体
安装使用
检查配件包东西是否齐全:乐高连接件、带连接线的夹爪、连接线延长线

夹爪安装:
结构安装:将乐高连接件插入夹爪预留的插孔中,根据需要可以选择两个不同方向进行安装:

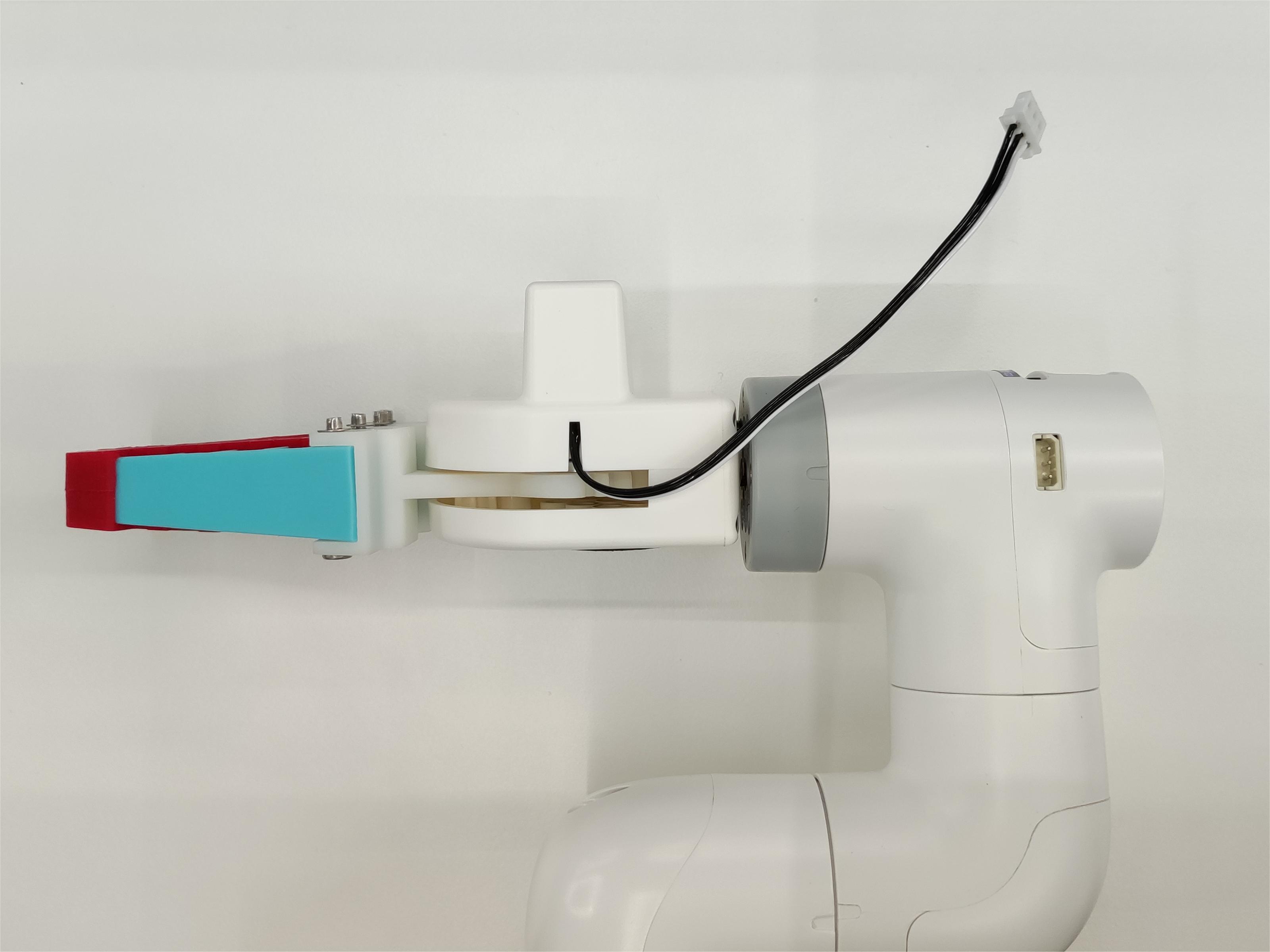
将插好连接件的夹爪对准机械臂末端插孔插入:
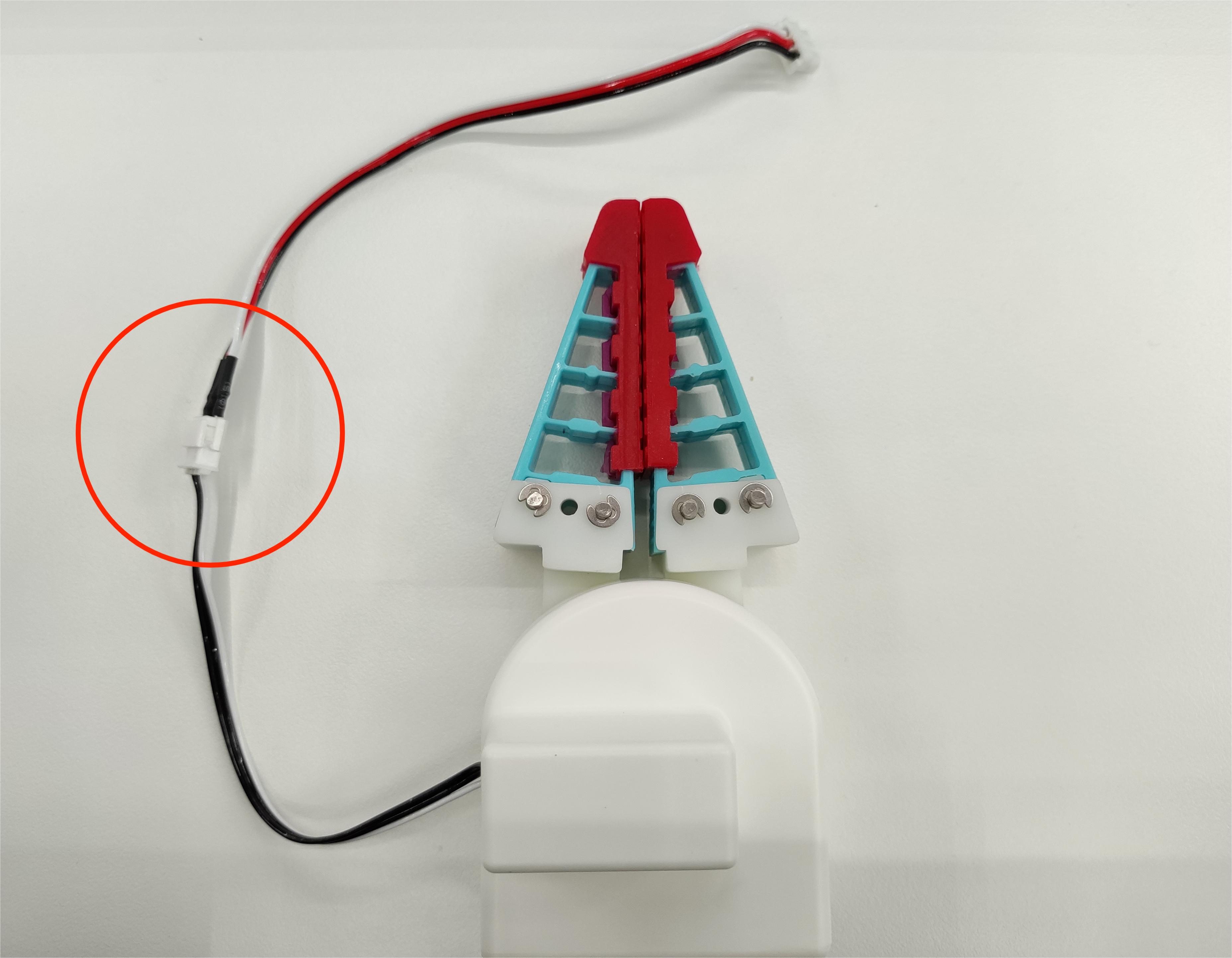
电气连接:
将延长线与夹爪连接:
 插入机械臂控制接口:
插入机械臂控制接口:


编程开发
- AR 版本:
from pymycobot import MyCobot280
import time
# 初始化一个MyCobot280对象
mc = MyCobot280("COM3", 115200) # 波特率默认是115200,部分板子是1000000,请根据实际进行修改
# 以下三种方式均可控制夹爪打开-关闭-打开
# 方式一:
mc.set_gripper_state(0, 80)
time.sleep(3)
mc.set_gripper_state(1, 80)
time.sleep(3)
mc.set_gripper_state(0, 80)
time.sleep(3)
# 方式二:
# mc.set_gripper_value(100, 80)
# time.sleep(3)
# mc.set_gripper_value(0, 80)
# time.sleep(3)
# mc.set_gripper_value(100, 80)
# time.sleep(3)
# 方式三:
# mc.set_encoder(7, 2048, 20)
# time.sleep(3)
# mc.set_encoder(7, 1500, 20)
# time.sleep(3)
# mc.set_encoder(7, 2048, 20)
# time.sleep(3)
- Pi 版本:
from pymycobot import MyCobot280
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot280初始化
import time
# 初始化一个MyCobot280对象
mc = MyCobot280(PI_PORT, PI_BAUD)
# 以下三种方式均可控制夹爪打开-关闭-打开
# 方式一:
mc.set_gripper_state(0, 80)
time.sleep(3)
mc.set_gripper_state(1, 80)
time.sleep(3)
mc.set_gripper_state(0, 80)
time.sleep(3)
# 方式二:
# mc.set_gripper_value(100, 80)
# time.sleep(3)
# mc.set_gripper_value(0, 80)
# time.sleep(3)
# mc.set_gripper_value(100, 80)
# time.sleep(3)
# 方式三:
# mc.set_encoder(7, 2048, 20)
# time.sleep(3)
# mc.set_encoder(7, 1500, 20)
# time.sleep(3)
# mc.set_encoder(7, 2048, 20)
# time.sleep(3)
保存文件并关闭,返回命令行终端,输入:
python grip.py
可以看到夹爪打开-关闭-打开