1 myBlockly初始使用
准备工作
下载myBlockly之前需要配置Python环境并使用myStudio进行固件的烧录。具体请参照下列操作方式。
环境配置:使用myBlockly之前,请确保电脑上已配置了Python环境(Python的下载安装和环境配置详情请参考基于Python开发使用-环境搭建章节)。
固件烧录:在使用myStudio进行烧录之前需要下载串口驱动程序,即 CP210X 或 CP34X 驱动程序压缩包。目前存在两种驱动芯片版本, CP210X (适用于CP2104版本)/CP34X (适用于CH9102版本)驱动程序压缩包。若您不确定您的设备所使用的USB芯片,可同时安装两种驱动。( CH9102_VCP_SER_MacOS 在安装过程中,可能出现报错,但实际上已经完成安装,直接忽略即可)。请根据电脑系统点击下方链接自行下载(具体安装步骤请参考myStudio安装驱动部分的动图展示)。 底部M5Stack Basic串口驱动程序: CP210X:Windows 10、MacOS、Linux CP34X:Windows 10、MacOS
末端Atom串口驱动程序:Windows 10
注意:对于 MacOS,在安装之前确保系统 "偏好设置->安全性和隐私->通用" ,并允许从 App Store 和被认可的开发者。
Raspberry Pi以及JETSON NANO版本机械臂无需烧录M5Stack-Basic固件。末端ATOM需烧录最新版的atomMain(出厂默认已烧录,无需再自行烧录)。
M5Stack系列需要通过myStudio烧录底部M5Stack Basic所需的固件miniRobot,且末端ATOM需要烧录最新版的 atomMain (出厂默认已烧录)。烧录需要用到myStudio这一固件烧录器。其下载安装请查询 基础功能应用 myStudio章节。下图为使用myStudio进行固件烧录的具体步骤(具体烧录步骤详情请参考第五章myStudio部分)。下图为使用myStudio进行固件烧录的具体步骤。


使用前提
正式开始编程使用前,一定要选择对应的机器型号,否则容易造成硬件损害
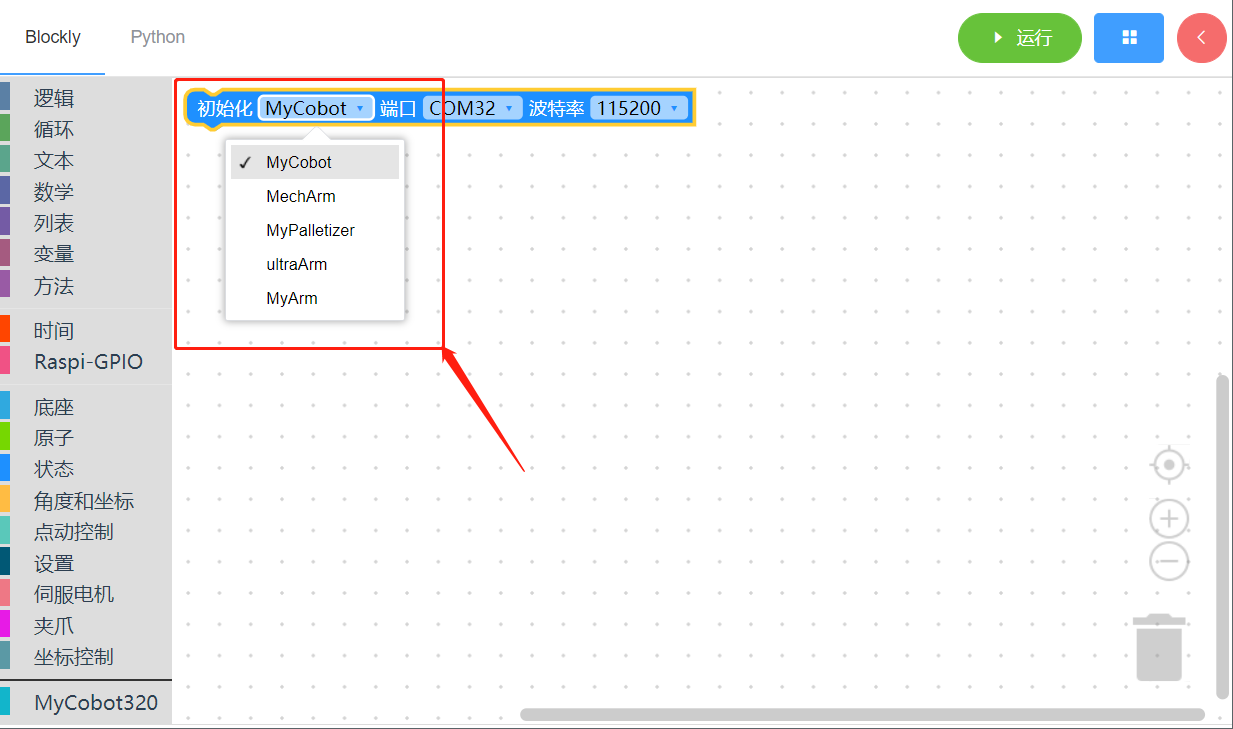
用控制面板控制机器时,一定要选择对应的机器型号,否则容易造成硬件损害
myBlockly界面展示

模块栏:
- 包含程序编写所需的方法模块,可以通过鼠标放入程序编辑区进行拼接
- MyCobot320模块
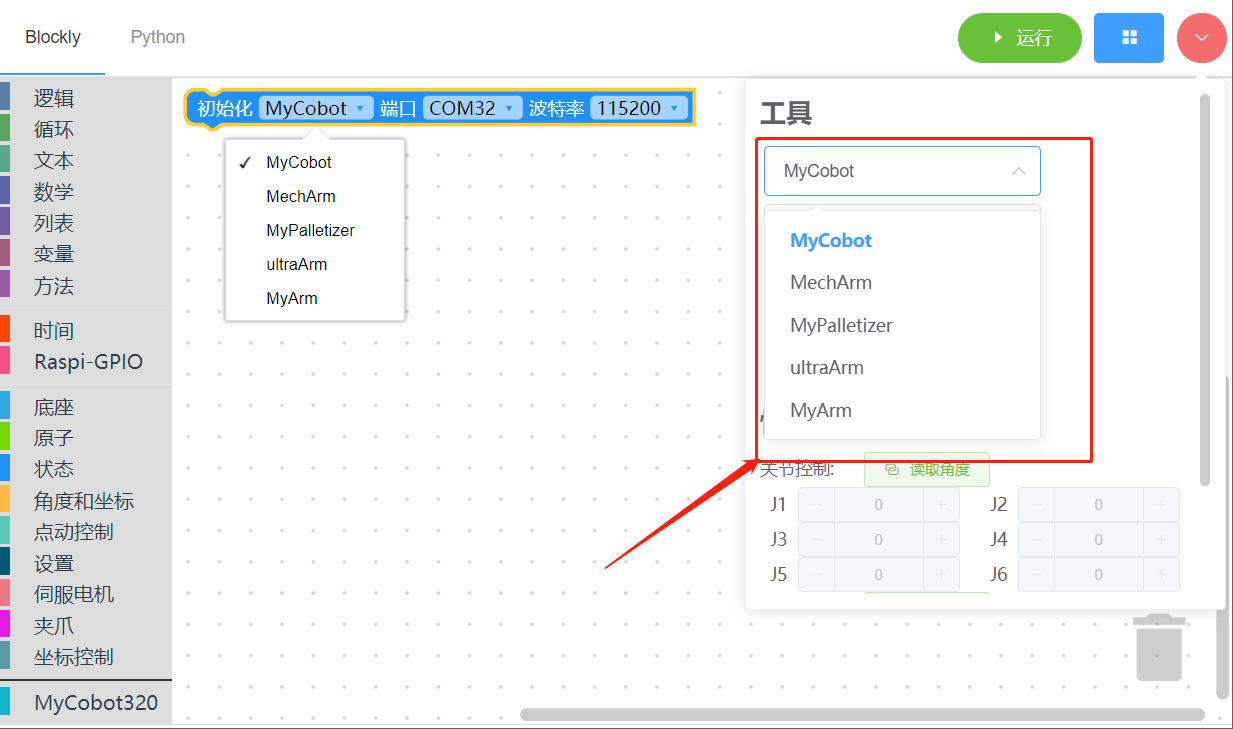
小工具栏:
点击右上角粉红色按钮会出现一个小工具栏,此处可以选择正确的机型、串口号以及波特率。也可以通过点击“读取角度”或“读取坐标”按钮获取机械臂实时关节角度和坐标。点击关节控制或坐标控制栏中的“+/-”可以控制机械臂移动。
程序编辑区域:
- 运行程序之前需要在初始化模块中或者小工具栏内选择正确的机型、端口以及波特率,否则程序无法正常运行。
- 把所需的模块方法拖拽到该区域拼接起来实现自己的程序。
- 如果右侧小工具栏已经修改了波特率和串口,但是此处仍然是/dev/ttyAMA0,则是myBlockly版本原因,需要先到官网更新软件版本(最新版本在小工具栏选择了串口和波特率后,编辑区的信息会随之改变)。
注意:
1.M5Stack系列的波特率一般为115200,Raspberry Pi系列的波特率一般为1000000。
| 机器型号 | 串口号 | 波特率 |
|---|---|---|
| 280 Arduino | Win: COM; Linux: /dev/ttyUSB 或 /dev/ttyACM ; | 1000000 |
2.查询机器的串口号和波特率的方法,请前往myStudio安装驱动章节查看。
3.当程序无法运行的时候请检查小工具栏是否断开链接(如下图所示)。
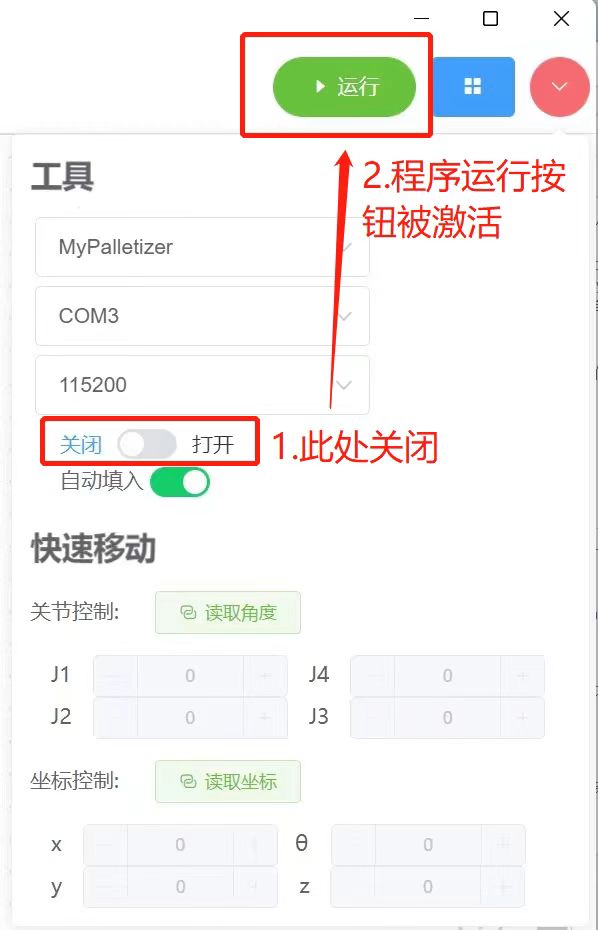

程序运行

拖动想要的方法模块,编辑自己的程序(如上图所示),每个模块结构相结合在一起(有ki的声音),再点击“运行”就可以将代码上传到机械臂当中运行了。
注意:操作机械臂运动的程序是需要时间来完成的,所以在一个动作之后需要接上一个睡眠模块,给机械臂运动的时间再进行下一个运动。(自己因情况决定所需的时间,机械臂默认设定跑myBlockly最低的睡眠时间不低于0.5s)否则会导致机械臂无法达到理想的运动。
点击左上角“Python”选项可以查阅对应的Python代码,如下图所示。


程序保存和载入
myBlockly的程序以*.json格式保存,点击界面右上角蓝色方框,出现“保存”选项点击后,即可保存程序。

同样点击蓝色方框,点击”加载“选项,可以导入已保存的程序。
