软件问题
1 myStudio相关
Q:myStudio是什么?
- A: 是我们公司自研软件。它是一款给我们公司推出的现有机械臂进行固件烧录或修改的工具。
Q:minirobot、Atom、PICO固件下载异常排查方法是什么?
检查网络连接是否正常,下载固件的过程中是需要连接网络先下载固件的。
检查线路是否已经连接完成,细节如下: 在M5/Arduino系列机器中,烧录Atom固件时,需要使用USB线将末端的Atom接口与电脑的usb口连接;M5系列机器在烧录nimirobot固件时,则使用USB线将M5stack的侧面接口与电脑的usb口连接即可。
选择对应机型的固件,不要选错其他机型的。
下载并安装驱动,如果下载驱动后仍然无法识别,可尝试更换最新的 ch340驱动 ,如果安装了驱动之后仍然无法显示端口号且系统为win11机型,可尝试 Win11系统装CH340驱动方法。
尝试换一个usb线缆、usb端口或者电脑下载试试,避免线缆不具备数据传输功能导致固件下载异常。
卸载mystudio,重新将mystudio安装在非C盘位置试试,例如将mystudio安装在D盘。在mystudio安装在C盘时,对文件权限要求相对苛刻,可能会出现固件无法烧录的情况。
Q:280arduino无法烧录固件如何处理?
A:我们已经验证正版Arduino mega2560固件是可以正常烧录mystudio固件的,验证视频如下: https://drive.google.com/file/d/1C7OhUlgkG05WX0LcPSollQZ0Vj-yJZhS/view?usp=sharing
针对你的arduino mage2560板子无法烧录烧录固件的情况建议你检查以下几点:
- 检查网络连接是否正常,下载固件的过程中是需要连接网络先下载固件的。
- 在烧录固件时,断开mycobot280Arduino与mega2560之间的tx、rx引脚连接,在下载固件是会存在串口冲突,存在无法正常烧录固件的情况,请在烧录成功后再连接tx、rx引脚。
- 尝试在进入mystudio之后再重新拔插一下usb端口,重新烧录。
- 尝试在烧录mega固件的时候,按一下arduino主板上的复位按键试试。
- 卸载mystudio,重新将mystudio安装在非C盘位置试试,例如将mystudio安装在D盘。在mystudio安装在C盘时,对文件权限要求相对苛刻,可能会出现固件无法烧录的情况。
如果上述方法均不起作用,那可能是你的Arduino mega2560主板与mycobot280Arduino固件不兼容的原因,你可以考虑更换其他mega2560主板下载固件或直接使用UNO主板的arduino开发方式控制机械臂。
注意: 在使用UNO主板时,不需要使用mystudio下载固件,可以直接使用Arduino IDE开发方式可烧录对应的案例代码控制机械臂,只有使用mega2560及WIFI1010主板控制机械臂时才需要使用mystudio下载对应的固件
2 myblockly相关
Q: 遇到报错信息:ModuleNotFoundError: No module named “pymycobot”,如何处理?
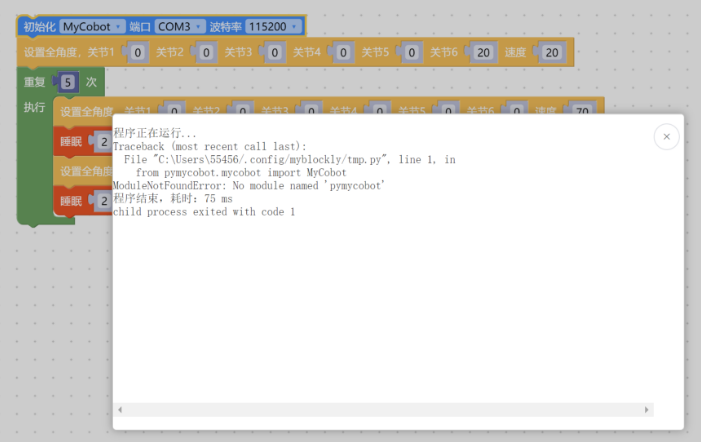
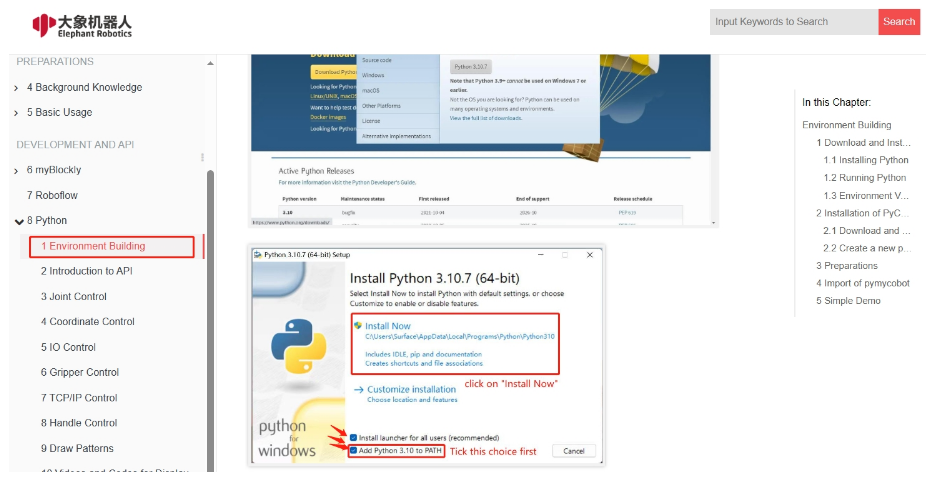
- A: 报错提示缺少pymycobot文件的包括原因及解决方法参考下文3点: ①没有安装pymycobot或者pymycobot出错,对应的解决方法是重新安装pymycobot,指令是pip3 install pymycobot --upgrade --user ②如是M5或AR系列机器,需注意在安装python的过程中没有勾选下图的“Add Pythonxx to PATH”,需要卸载python后重新安装python,并将此选项勾选
③如是M5或AR系列机器,请确认PC中是否有多个python版本,建议卸载PC内所有python版本重新安装一个python3.8以上的版本,注意保持在PC中有且仅有一个python3.8以上版本。如实际使用需要多个python版本,请指定pymycobot使的python版本并在调用pymycobot库时指定python运行的版本
Q:280arduino与mega2560板子一起使用,无法正常使用myblockly控制关节,运动及读取都无响应,如何处理?
A:下载myblockly1.4.4版本,或在使用最新版myblockly时,注意在用开发板Arduino MEGA2560,积木块控制机械臂时,需要使用者手动添加延时积木块,后再发指令,使用快速移动工具则需要打开串口后间隔1s再发送指令

Q: myblockly的快递移动工具无法显示实时角度怎么处理?
- A:这个一般是由于设备串口信息选择错误、pymycobot异常导致的,建议根据本文的"首次使用自查"方案进行排查,如未能正常控制机械臂,请尝试更新pymycobot,对应更新方案是在cmd或者终端中输入指令
pip install pymycobot --upgrade --user最后如果仍然无法正常控制,请尝试更新myblockly软件,更新方法请参考下面的链接: https://drive.google.com/file/d/1yBWzhbSBUYsZPBl7PBdZKRwk3al71Dc7/view?usp=sharing
Q:运行程序结果显示 child process exited with code 1,正常吗?
- A: 这个不是报错。是全部的程序都运行结束返回了二进制数字1。代表已经全部顺利运行完成。
Q:如何在myblockly中预设代码块内容,包括进入系统后机型、波特率等信息都是对应接入的机型的?
- A:目前在myblockly中初次启动默认的机型是mycobot、波特率115200,暂时没有更改初始波特率的方法,但是你可以自己制作保存一个初始化的json文件,下次进入myblockly后加载此文件可得到预设的代码块。 制作及保存json文件的方法请参考下文:https://drive.google.com/file/d/1g_dd933TK1tptnisUad4PBfwSRsWWFeQ/view?usp=sharing
3 RoboFlow相关
Q:无法下载Roboflow软件,Roboflow无法正常控制机器如何处理?
- A:目前Roboflow软件仅支持600/630这两款Pro 专业协作,不再支持mycobot协作型或其他型号机器,mycobot系列机器建议使用的控制方式是myblockly、python及ros,值得一提的是,myblockly是一款与Roboflow图形化界面相似的软件,如果您需要使用可视化图形编程可优先考虑使用myblockly软件。
4 Python相关
Q:运行提示缺少库文件Q:遇到报错信息:ModuleNotFoundError: No module named “pymycobot”,如何处理?
A1:没有安装pymycobot,对应的解决方法是重新安装pymycobot,指令是
pip3 install pymycobot --upgrade --userA2: 在安装python的过程中没有勾选下图的“Add Pythonxx to PATH”,需要卸载python后重新安装python,并将此选项勾选。
A3: 如是M5或AR系列机器,请确认PC中是否有多个python版本,建议卸载PC内所有python版本重新安装一个python3.8以上的版本,注意保持在PC中有且仅有一个python3.8以上版本。如实际使用需要多个python版本,请指定pymycobot使的python版本并在调用pymycobot库时指定python运行的版本。
A4:建议使用3.9版本的pyhton,pyhton12会出现不兼容的情况。
Q:send_coords(coords, speed, mode)中的mode有没有通俗一点的解释?
- A:线性1代表机械臂末端以直线的方式抵达目标位置,如果因为限位、结构等原因无法走直线,那指令就不会完全执行; 线性0表示末端以任意姿态抵达目标位置,由于没有直线的限制,不容易出现指令不执行的现象。
Q:set_fresh_mode(mode) 的插补和刷新模式有什么区别?
- A: 插补0是指起始点和终止点之间规划了很多密集的点位,从而达到控制中间段轨迹的效果。 如何达到程序并行的效果:非插补1就是没有中间段的规划,控制不了轨迹,但是运动会相对平滑。
Q:在仅改变Z轴的情况下,轨迹不是直上直下的,但是最后落点是只改了Z轴,这个正常吗,如何确保中间轨迹也是直线?
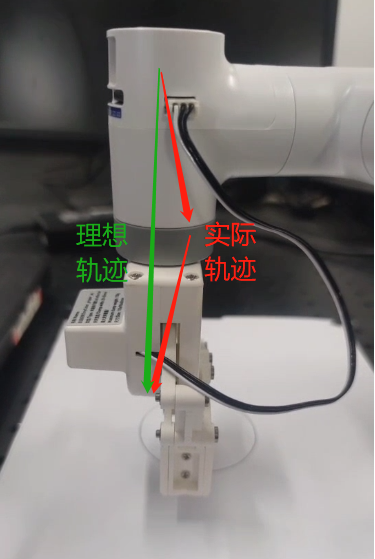
- 开插补走直线就能确保轨迹了
set_fresh_mode(0) # 开插补 send_coords(coords, speed, mode=1) # 走直线
注意一定要开插补之后,在send_coords设置的智能规划路线才有用。 插补是指起始点和终止点之间规划了很多密集的点位,从而达到控制中间段轨迹的效果。 非插补就是没有中间段的规划,控制不了轨迹。
Q:get_error_information()的返回值为-1是什么意思?
- A:
get_error_information()的返回值为-1,表示无法正常通讯,你需要检查电源适配器及usb线是否连接,检查LCD屏幕是否停留Atom:ok界面,如果线路未连接成功,且未显示ok均会出现通讯异常的情况,需要重新连接再测试。
Q:用280机器的绘制案例是发现形状轨迹不是很直,能优化吗?
A1:使用签字笔硬质文具等来用这个绘制案例,得到轨迹有偏差这是正常 的。这种偏差主要有2个原因造成,一是由于mycobot使用的是伺服舵机,有一定的精度偏差(如果是使用时间较长的机器,由于关节老化,其关节的偏差会更大),二是在使用硬笔在绘画时跟桌面接触距离比较苛刻,距离过高轨迹容易产生轨迹中断,距离过低会出现笔尖阻力过大卡顿的问题,所以绘制出来的效果并不理想。目前建议使用软质文具进行绘画,例如毛笔毛刷等工具,这对改善绘画效果有一定帮助。
A2:另外,你可以将机械臂的运动模式更改成插补模式,这样运动轨迹会相对平直。
set_fresh_mode(0) # 开插补 send_coords(coords, speed, mode=1) # 走直线注意一定要开插补之后,在send_coords设置的智能规划路线才有用。 插补是指起始点和终止点之间规划了很多密集的点位,从而达到控制中间段轨迹的效果。
Q:识别到的目标位置,末端无法到达,怎么判断这个坐标是否可以到达然后处理?
- A:solve inv kinematics(target coords, current_angles)用这个接口看是否有解就可以了。
solve_inv_kinematics(target_coords, current_angles)
- 功能 : 将坐标转为角度。
- 参数:
- target_coords: list 所有坐标的浮点列表。
- current_angles: list 所有角度的浮点列表,机械臂当前角度
- 返回值: list 所有角度的浮点列表。
5 Arduino相关
Q:Arduino使用UNO能不能使用串口控制
- A:能,接TX、RX,使用串口指令可进行控制
Q:Arduino如何使用串口控制?
- A:在不带任何主控板的情况下,接一个usb转ttl模块(TX、RX、GND),可使用串口助手工具控制发送我们提供的串口指令,实现控制关节运动等功能
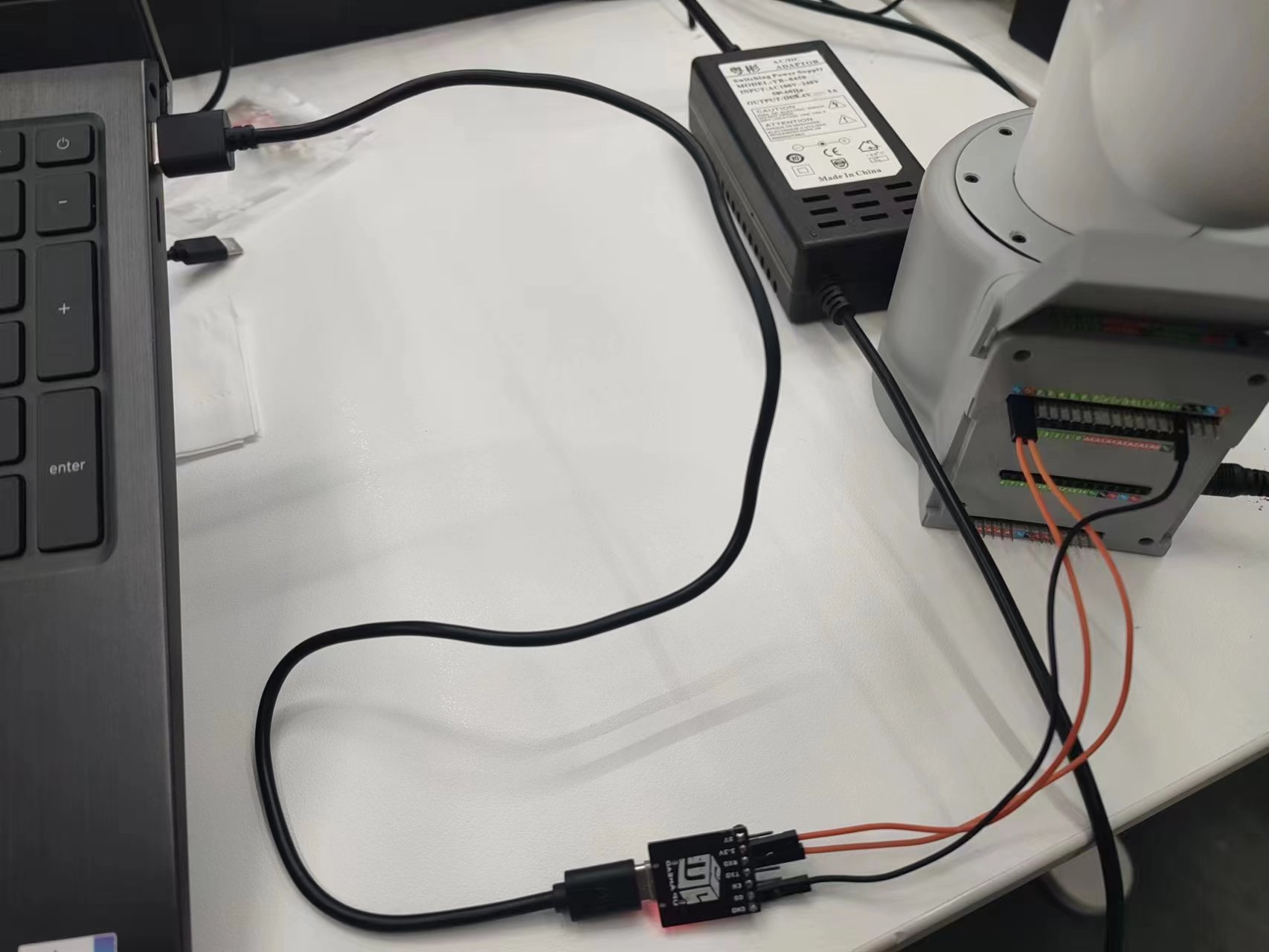
在使用时需要注意,选用波特率:1000000及对应的端口
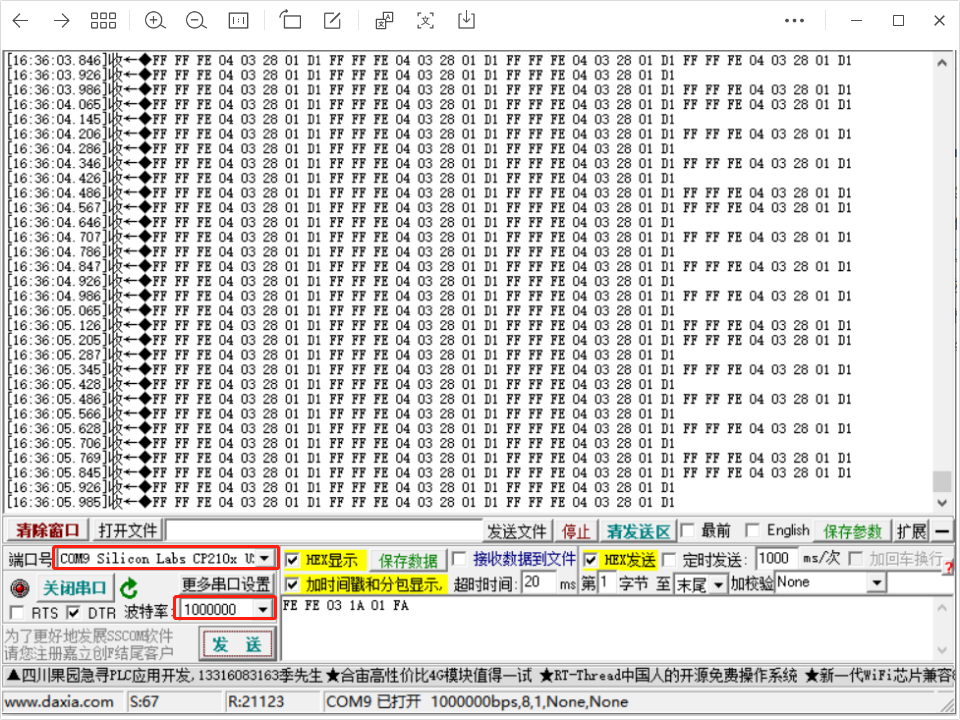
在使用机器人自由模式(关闭所有扭力输出)串口发送示例:FE FE 03 1A 01 FA时,注意当Atom灯变黄色之后,需要按住Atom按键才能进行关节移动

Q:280arduino支持的控制方式
- A:280Arduino支持: Arduino mkrwifi1010,mega2560, UNO,等多种支持UART串口通讯接口模块的开发版扩展。 其中UNO由于硬件的接口有限,无法使用Python控制,需要用Arduino IDE控制,且uno板子是通过杜邦线连接到arduino板子上的,不能直接插。
注意: 目前的280AR串口波特率改为1000000,不同开发板的接线不同:
| 开发板类型 | 波特率 | 控制方式 | 接线方式 | 接线图 |
|---|---|---|---|---|
| mega2560 | 1000000 | python/MyBlockly | TX0-->RX、RX0-->TX、GND-->GND | 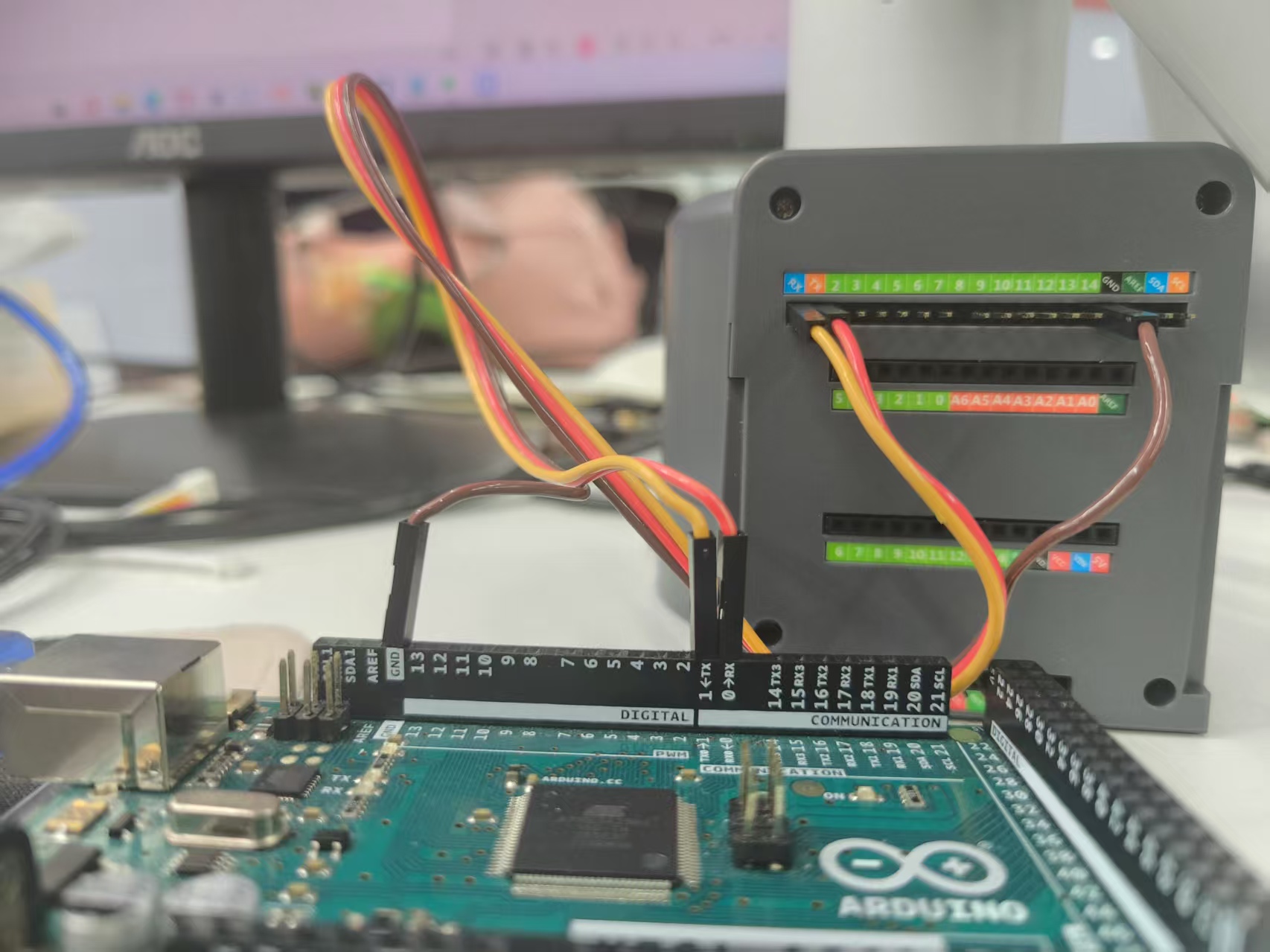 |
| mega2560 | 1000000 | Arduino IDE | TX1-->RX、RX1-->TX、GND-->GND | 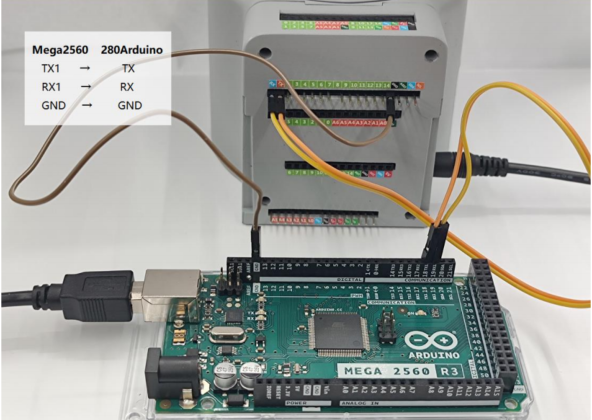 |
| UNO | 1000000 | Arduino IDE | tx-->tx RX-->RX、GND-->GND | 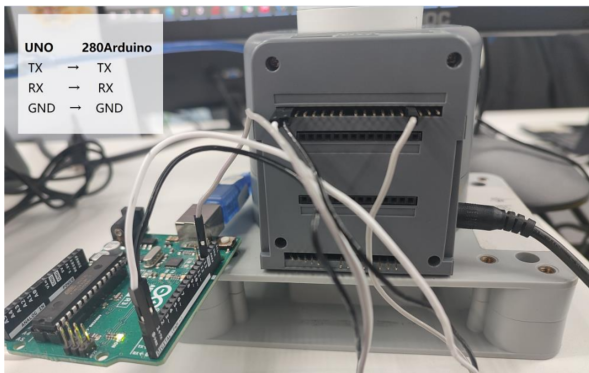 |
| mkrwifi1010 | 1000000 | 暂无 | 暂无 | 暂无 |
6 ROS相关
Q:有没有配置好环境的虚拟机镜像?
A:我们有提供一个配置好ROS1及ROS2环境且内置ROS源码的虚拟机环境,用户可以通过下面这个链接下载,并将虚拟机文件导入VirtualBox,省去自己配置环境的麻烦,当测试ROS案例时建议使用我们已经配置好的虚拟机环境进行验证,避免由于环境配置的原因导致的一些案例运行报错 请参考虚拟机文件导入虚拟机软件的操作步骤视频:https://drive.google.com/file/d/1KeYk_CUgDE46rVn7zbd0EhraIbgt3qZt/view?usp=sharing
Q:导入ROS2虚拟机文件的时候报错怎么处理?

- A: 这是因为虚拟机软件Oracle VM VirtualBox版本过低导致的,需更新虚拟机软件版本。
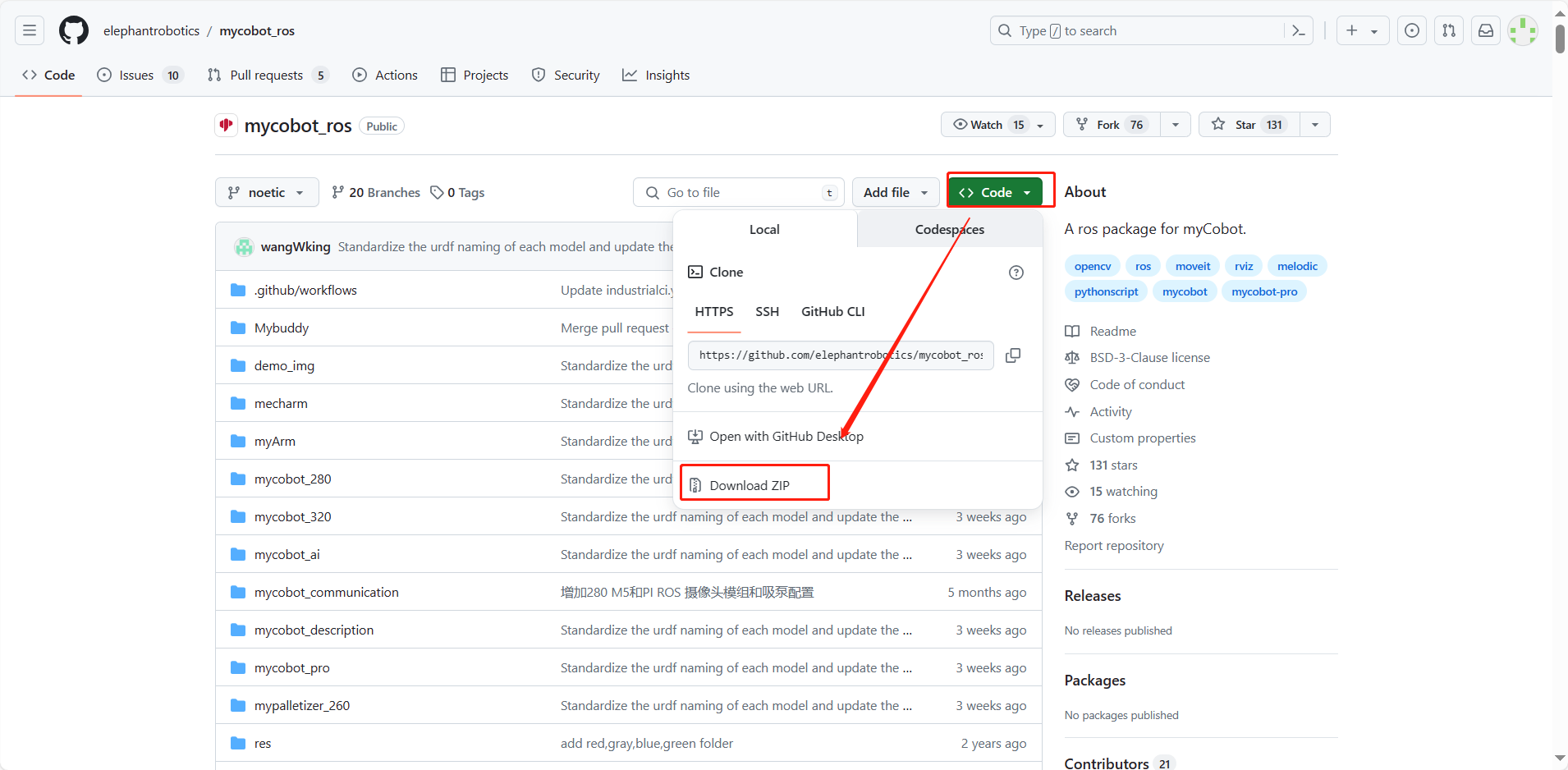
Q:如何重新下载ROS源码包?
A:使用指令拉取:
git clone https://github.com/elephantrobotics/mycobot_ros.git或着手动下载,下载方法进入到ROS源码包地址按照下图进行操作,源码包地址:https://github.com/elephantrobotics/mycobot_ros
Q: 运行ROS moveit案例发现报错ImprotError:No module named yaml咋办?
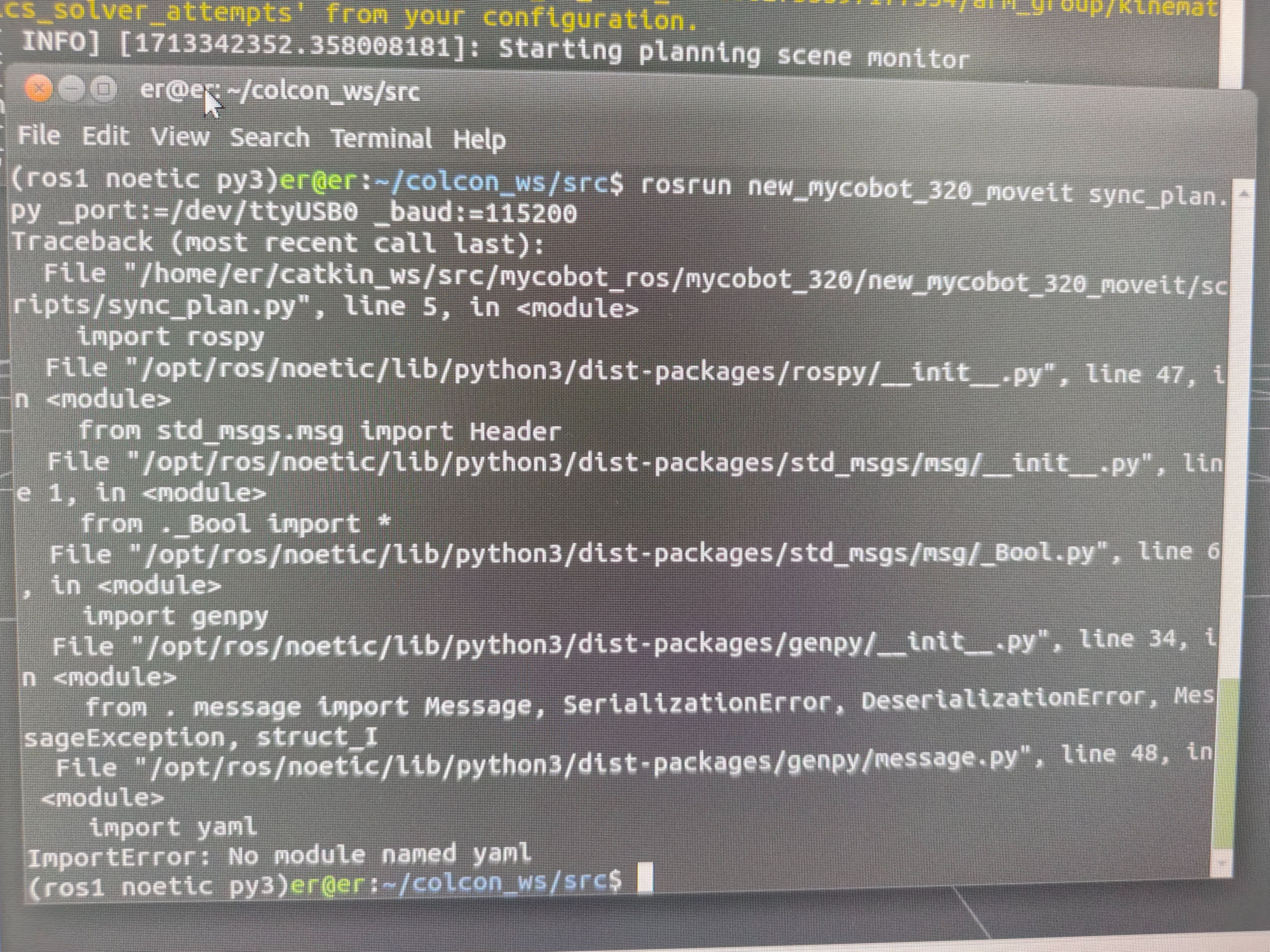
- A:在这个脚本开头第一行,把Python解释器改为python3
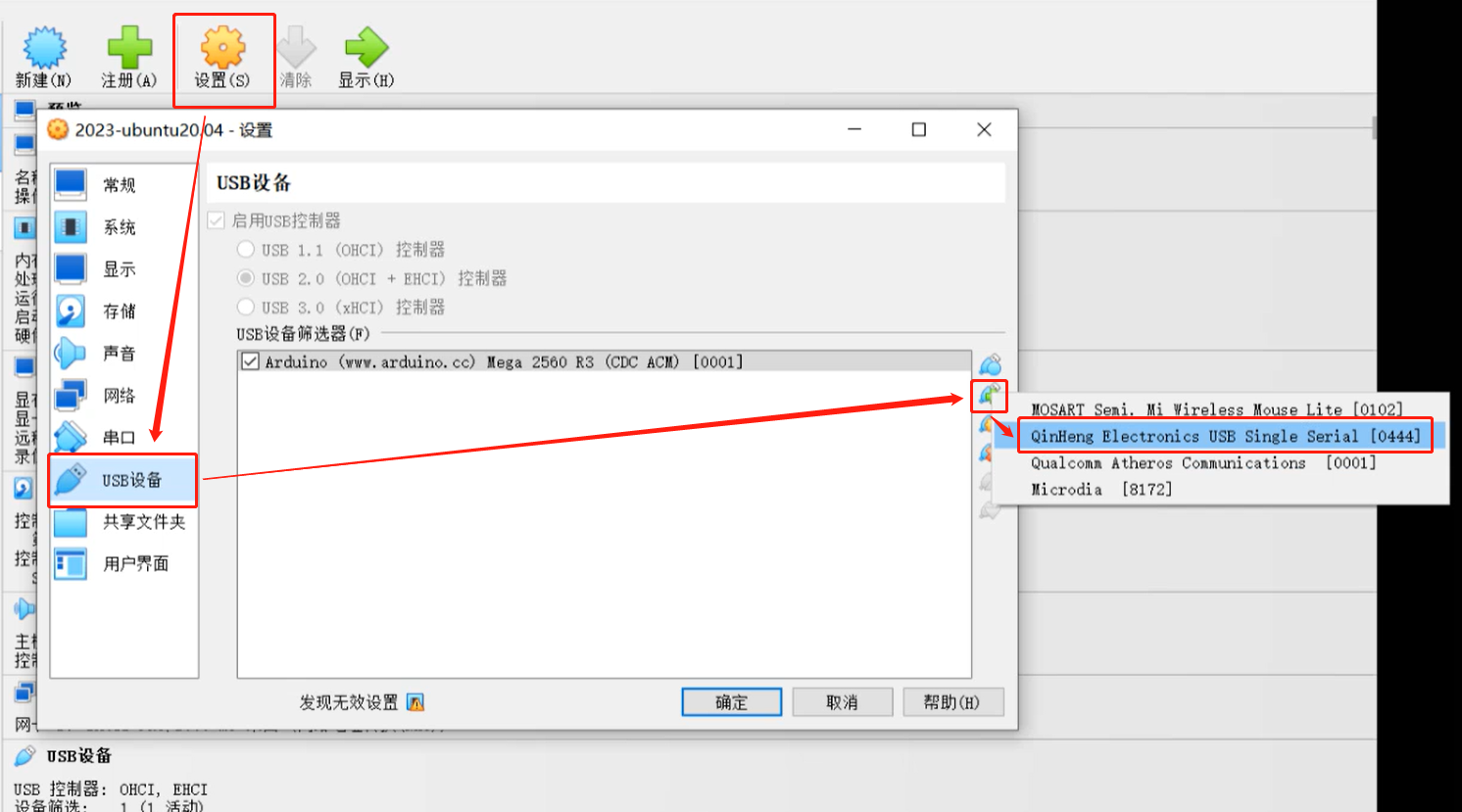
Q:运行虚拟机找不到串口怎么处理?
A:使用USB线将M5机械臂与PC连接,打开虚拟机设置→USB设备→添加USB设备→选择串口号QinHeng xxxxx,这个就是机器的串口设备。 如果没有这个设备号,可以通过重新拔插设备获取对应的USB设备号,拔插有串口变化的即对应的机器串口设备号
Q:使用基于mujoco的环境进行仿真训练,因此需要机器人的xml文件
- A:目前GitHub上只有280JN的xml文件:280JN
- 提供给客户如何将dae、urdf类型的文件转换成xml文件的方法给客户,让客户用meshlab自行转换。
Q:终端切换到~/catkin_ws/src中使用git安装并更新mycobot_ros时,出现目标路径"mycobot_ros"已经存在,原因是什么?
- A:说明
~/catkin_ws/src中已经存在一个mycobot_ros程序包,需要提前将其删掉,再重新执行git操作即可。
Q:rosrun运行时,终端报错显示counld not open port /dev/ttyUSB0:Permission: '/dev/ttyUSB0',是为什么?
- A:串口权限不够,终端输入
sudo chmod 777 /dev/ttyUSB0赋予权限。
Q:rosrun运行时,终端提示Unable to register with master node [http://localhost:11311]: master may not be running yet. Will keep trying的原因是?
- A:运行ros程序前,需开启ros节点,终端输入
roscore。
Q:rosrun运行时,终端报错显示counld not open port /dev/ttyUSB0:No such file or directory: '/dev/ttyUSB1',是为什么?
- A:串口有误。需确认当前机械臂的实际串口。可通过
ls /dev/tty*查看。
Q:在Ubuntu18.04中进行catkin_make构建代码失败,终端提示Project 'cv_bridge' specifies '/usr/include/opencv' as an include dir, which is not found.等报错信息
- A:配置文件中的opencv路径与系统实际路径不相符。需使用sudo修改配置文件(路径为
/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake),系统实际opencv路径位于/usr/include/路径下。
Q:刚克隆下来的mycobot_ros程序包,然后直接运行rosrun程序,出现package 'mycobot_280' not found的错误或者找不到该文件之类的错误?
- A:刚克隆下来的mycobot_ros需要构建代码进行ros环境编译。终端输入
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
Q:编译完成后,新开终端运行launch指令时,为什么会出现下面的错误?

- A1:系统没有添加ros环境变量,所以每次开启新终端都要source:
cd ~/catkin_ws/
source devel/setup.bash
- A2:系统添加ros环境变量,每次开启新终端后无需执行source:
# noetic为Ubuntu20.04系统
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- A3:可能是指令中的文件名与实际中mycobot_ros包里面的文件名不一致,请仔细检查指令是否有误。
7 C++相关
Q:找不到各种dll文件怎么处理?
- A1:如果myCobotCpp.dll缺失,将之前放到lib目录下的myCobotCpp.dl放到mycobotcppexample.exe所在目录下.
- A2: 如果报缺少QT5Core.dll,打开qt command (菜单栏搜索QT) ,选择msvc2017 64-bit,执行windeployqt--release myCobotCppExample.exe所在目录(如: windeployqt --release D:lvs2019myCobotCpploutlbuildlx64-Releaselbin) 此处执行命令后如果报找不到vs安装路径,请检查vs环境变量的设置.
以上步骤执行后,如果报缺少qt5serialport.dll文件,将gt安装目录处的此文件(路径如: D:lgt5.12.1015.12.10msvc2017 64bin),拷贝到myCobotCppExample.exe所在目录
Q:生成myCobotCppExample.exe可执行文件,这个有可能是什么问题?
选择下图中的启动
