Drag to teach
Trajectory recording and playback can be realized.
Python version drag and teach only supports Pi and Jetson Nano versions in 280, 270, 260, myArm 300 and 320 models.
Instructions:
- Download Drag Teaching Python Code File
- Copy the downloaded file to the robotic arm system.
- Open the terminal and run the file:
python drag_trial_teaching.py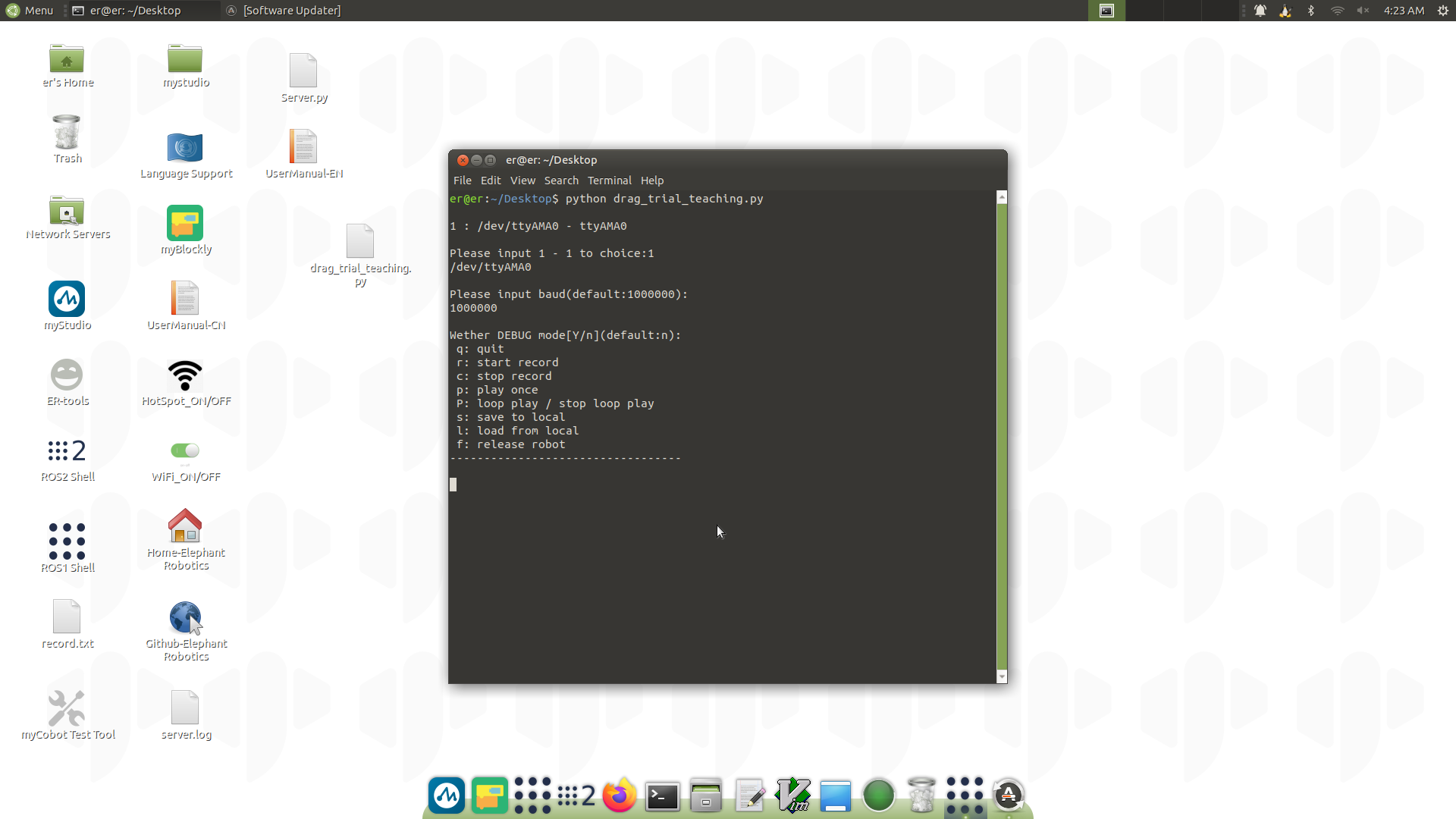
After the file is run:
- 3.1 Select robot type
- 3.2 Select robot port
- 3.3 Enter the baud rate, the default is 1000000
| machine type | Serial number | baud rate |
|:---------:| :--------:|:--------:|
|270 PI| /dev/ttyAMA0|1000000|
|280 PI| /dev/ttyAMA0|1000000|
|320 PI| /dev/ttyAMA0|115200|
|280 Jetson Nano| /dev/ttyTHS1|1000000|
|260 PI| /dev/ttyAMA0|1000000|
|myArm 300 PI| /dev/ttyAMA0|115200|
- 3.4 Choose whether debugging is required, debugging is not enabled by default
- 3.5 Finally, enter the function selection list, and the function selection is realized through the keyboard keys:
q: quitr: start recording, now you can start dragging the robotic armc: stop recordingp: (lowercase letters) play onceP: (uppercase letters) loop / stop playbacks: Save this recording information, it will save the recording information to the record.txt file in the same directory asdrag_trial_teaching.pyl: will load the information in the record.txt file in the same directory asdrag_trial_teaching.pyf: relax all joints of the robot arm
- Open the terminal and run the file: