C# Environment setup
1 Confirm development goals
Supported robotic arm models: myCobot320< Br> Run the recommended software from Mycobot.csharp: vs2019 (developed on Windows) and MonoDevelop (developed on Raspberry Pi robotic arm)< Br>
2 Raspberry Pi Robot Arm Environment Configuration
2.1 Install monodevelop
Installation
Execute the following command in order to install, or you can view itOfficial website description:
sudo apt install apt-transport-https dirmngr
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-keys 3FA7E0328081BFF6A14DA29AA6A19B38D3D831EF
echo "deb https://download.mono-project.com/repo/ubuntu vs-bionic main" | sudo tee /etc/apt/sources.list.d/mono-official-vs.list
sudo apt update
sudo apt-get install monodevelop
Testing:
Test whether the installation was successful, please check thisdocument。
3 Compile and run the Mycobot.csharp case
Download from GitHubMycobot.csharp。
3.2 动态库下载
To run the case, you need to use this dynamic library, which encapsulates the API for controlling the robotic arm:
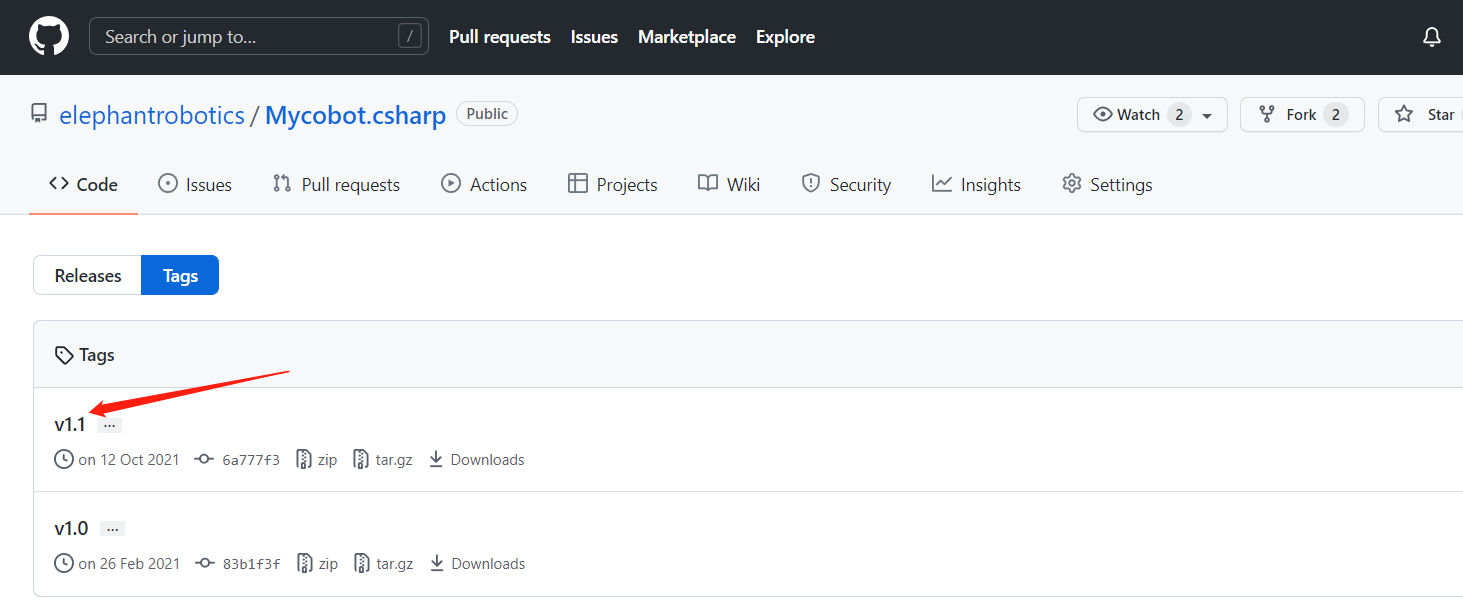
Select the latest version, as shown in the following figure:
The dynamic library is divided into Windows and Raspberry Pi system versions, as shown in the following figure:
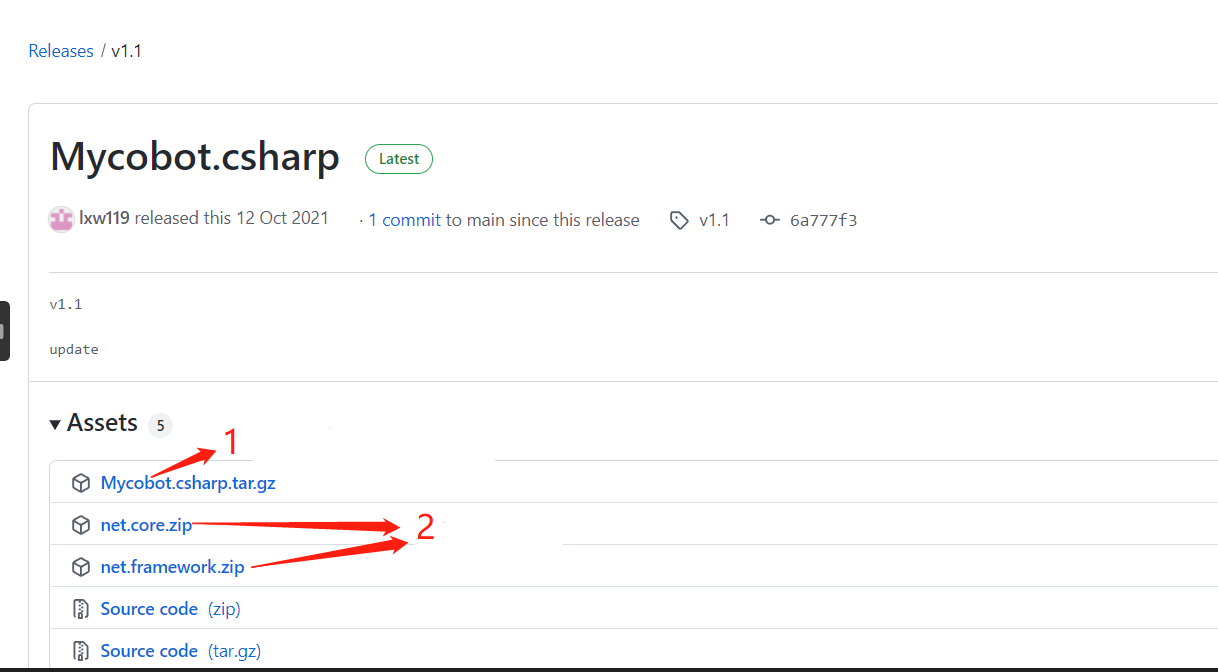
Arrow 1 is applicable to the Raspberry Pi robotic arm system
Arrow 2 applies to Windows systems
3.3 Operation
1 Create a C # console application
2 Copy file program. cs , then paste program. cs into the newly created C # console application
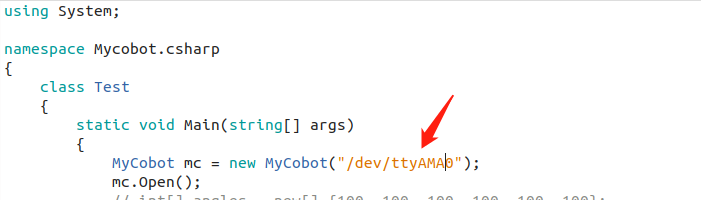
3 Change the port number in program.cs Change to /dev/tyAMA0 (MyCobot mc=new MyCobot ("/dev/tyAMA0"))
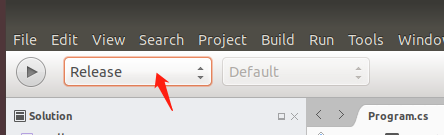
4 Change the compilation method to Release
5 Add the Mycobot.csharp.DLL library file to the project,library:ReFerences-->Edit References-->.Net Assembly-->Browse(path for .dll)
6 Right click on your project project in the project bar ->Find Add ->Add NuGet Packages ->Click on it and enter system. io. ports ->Check System in the search bar above IO. Port ->Click on the bottom right corner to add
7 Operation
Attention: Compile&&Run, the entire operation process can be seen in the following dynamic diagram: