Product specification parameter

1 Manipulator parameter
| Index | Parameter |
|---|---|
| Name | Baby Elephant Cooperative Robotic Arm |
| Model | myCobot 320 Pi |
| Freedom | 6 |
| Working Radius | 350mm |
| Efficient Load | 1kg |
| Repeated Positioning Precision | ±0.5mm |
| Weight | 3。3kg |
| Power Input | 24V,9.2A |
| Operating Temperature | 0°~45° |
| Communication Interface | Mother port Type-C |
| Service life | 2000h |
2 Workspace
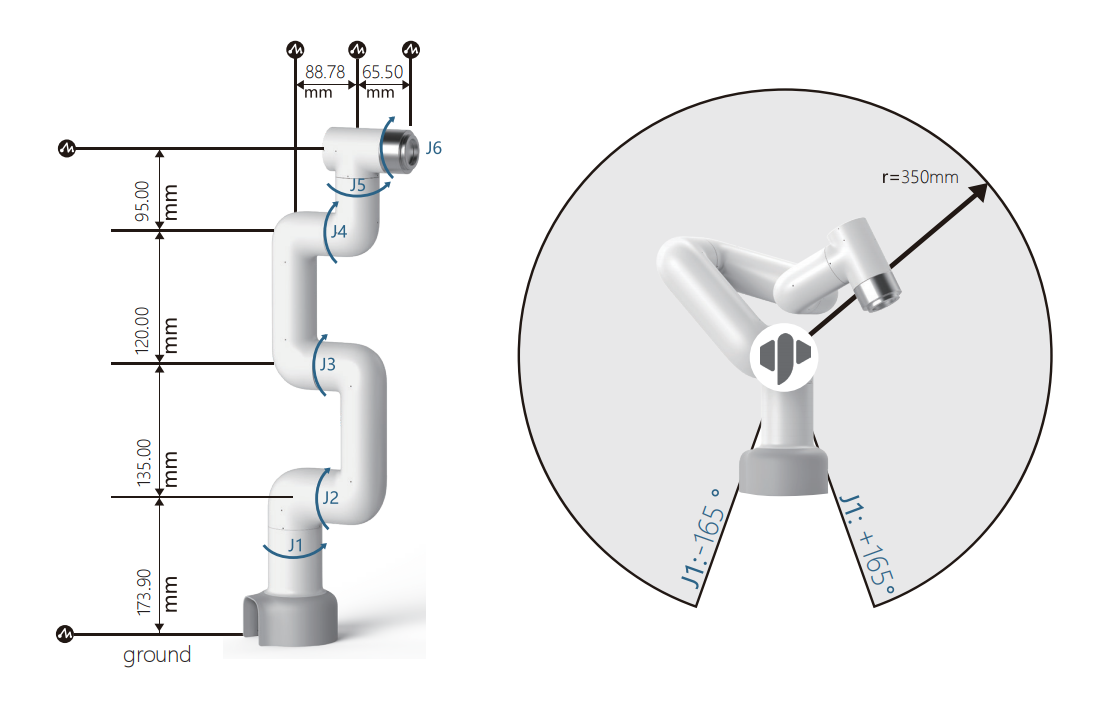
3 Motion Angles of Joints
| Joint | Angle |
|---|---|
| J1 | -165 ~ +165 |
| J2 | -165 ~ +165 |
| J3 | -165 ~ +165 |
| J4 | -165 ~ +165 |
| J5 | -165 ~ +165 |
| J6 | -175 ~ +175 |
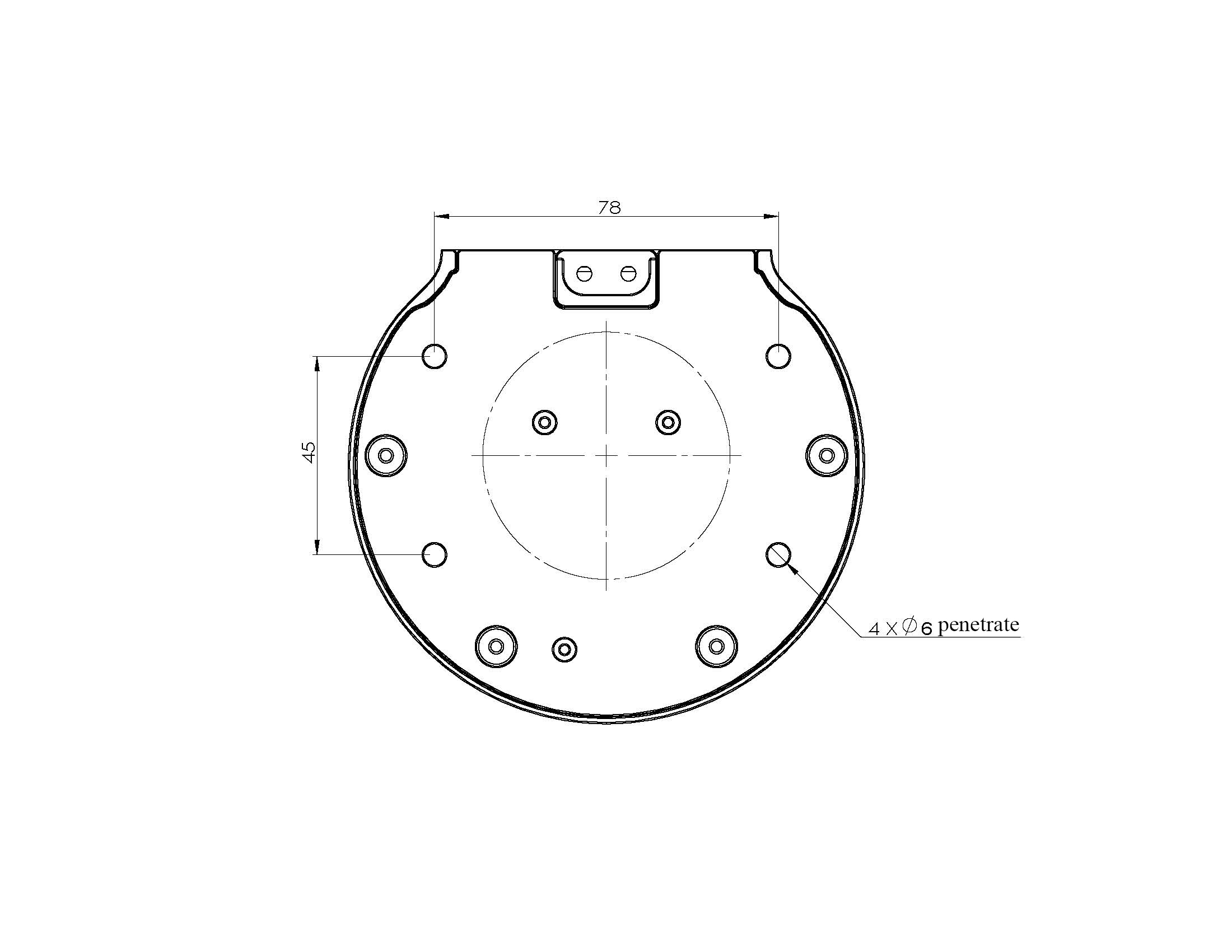
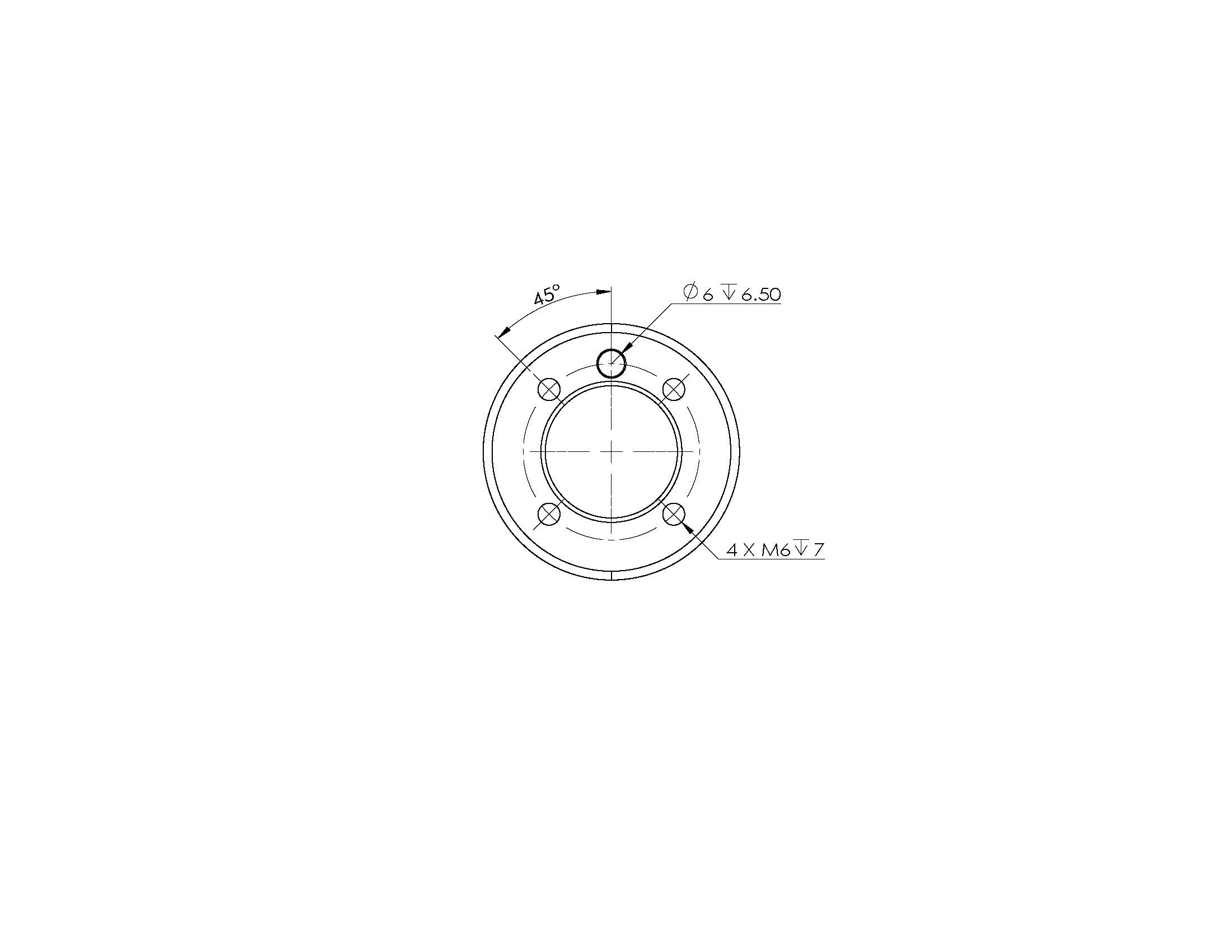
4 Installation of Hole
- The base is mounted with flange and is compatible with both installation of LEGO and M6 screw.
- The end of the arm is compatible with both LEGO component holes and threaded holes.
5 Software basic function support
| Function/development environment | Usage situation |
|---|---|
| Free Mobile | Support |
| Joint Movement | Support |
| The Cartesian Movement | Support |
| Track Recording | Support |
| Wireless Control | Support |
| Emergency Stop | Support |
| ROS 1 | Support |
| Python | Support |
| C++ | Nonsupport |
| C# | Nonsupport |
| JavaScript | Nonsupport |
| myblockly | Support |
| Arduino | Nonsupport |
| mystudio | Support |
| Serial Control Protocol | Support |
| TCP/IP | Support |
| MODBUS | Support |