机械臂的控制
1 网络连接部分
确保PC与myCobot Pro 600处于同一局域网下,以我的wifi热点:ElephantWIFI-5G为例。
- myCobot Pro 600端:
- PC端:
2 Pro600端操作部分
- 确保myCobot Pro 600在Roboflow中处于正常启动状态。

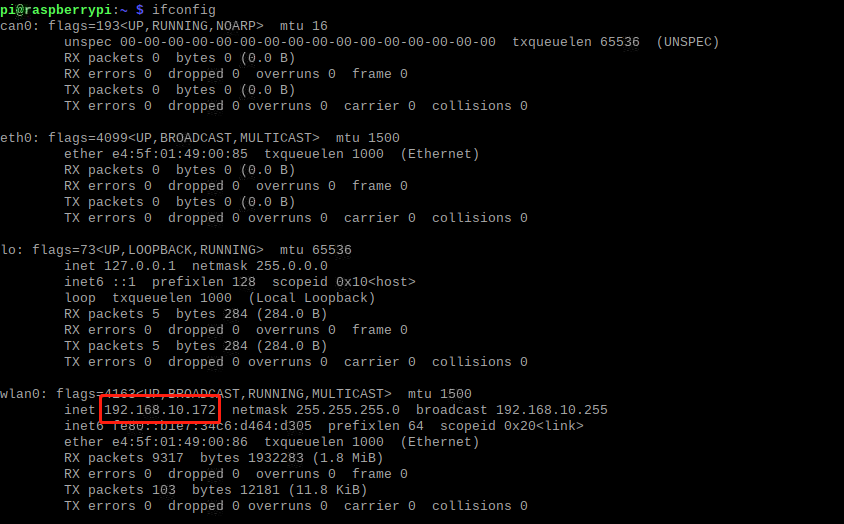
- 使用终端指令:
ifconfig,获取树莓派的实际ip,本案例中的树莓派ip是192.168.10.172。
3 PC端操作
3.1 环境配置
下载大象提供的虚拟机及虚拟机文件,里面有配置好的虚拟机。
导入虚拟机文件的操作视频:https://drive.google.com/file/d/1KeYk_CUgDE46rVn7zbd0EhraIbgt3qZt/view?usp=sharing
3.2 修改脚本文件
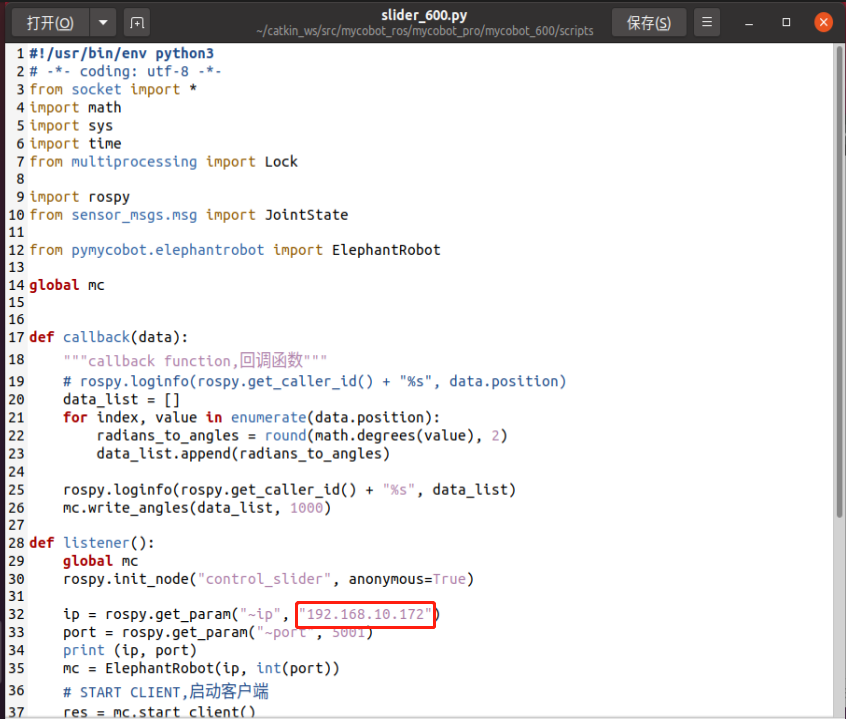
打开虚拟机,找到slider_600.py文件

从下面链接中获取最新的slider_600.py源码,替换系统中原文件中的旧源码
更改slider_600.py文件中的ip地址,本案例树莓派ip是192.168.10.172,在用户使用过程中需根据用户机器的实际ip填写,更改结束记得保存。
3.3 启动仿真滑块控制
在PC的虚拟机中启动滑块控制仿真模型的进程,步骤如下:
在终端中,使用下面的指令加载源码:
source catkin_ws/devel/setup.bash

在终端中,使用下面的指令启动滑块控制:
roslaunch mycobot_600 mycobot_600_slider.launch
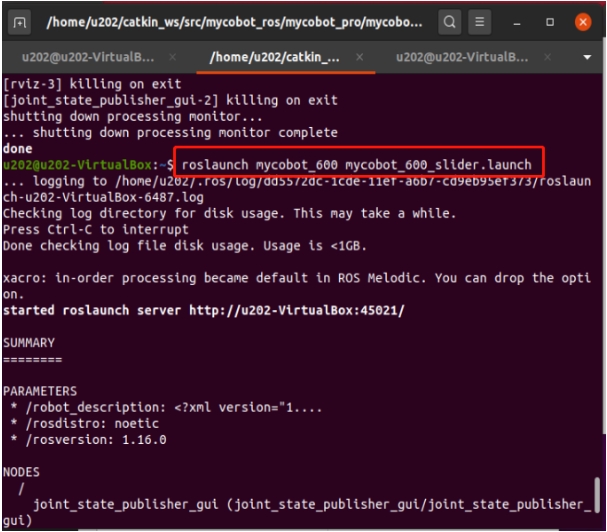
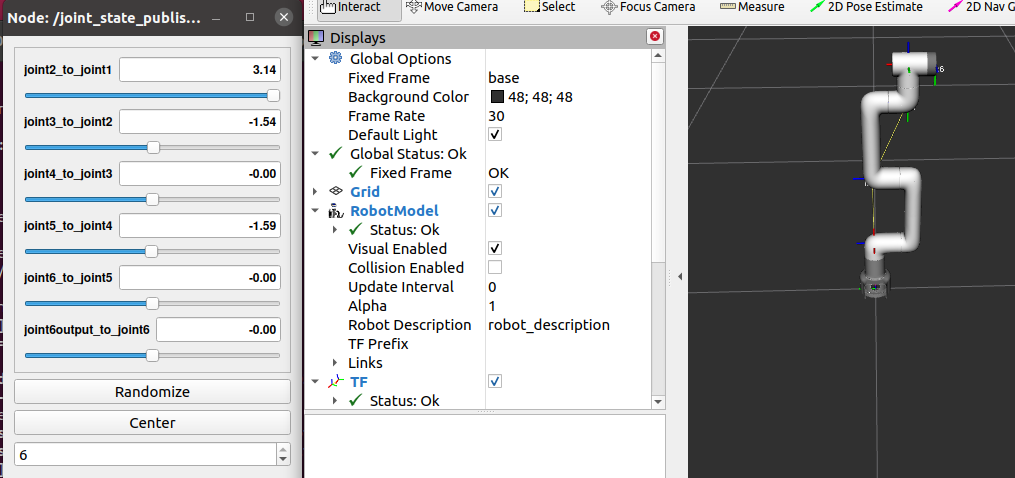
启动成功后,你可以看到机械臂仿真模型及一个滑块控制的UI界面,可以通过拖动滑块的方式对机械臂模型进行控制。 其中,滑块中所示意的数值,其单位是弧度,如下图所示的joint2_to_joint1的弧度3.14,即为关节角度为180°。
3.4 启动真机滑块控制
在启动真机跟随之前,需要确认2点,避免在异常姿态下启动真机跟随后,机械臂打到其他周围物品及人。
- 让机械臂真机周围无障碍物且处于零位姿态,即零点标签对齐的竖直姿态
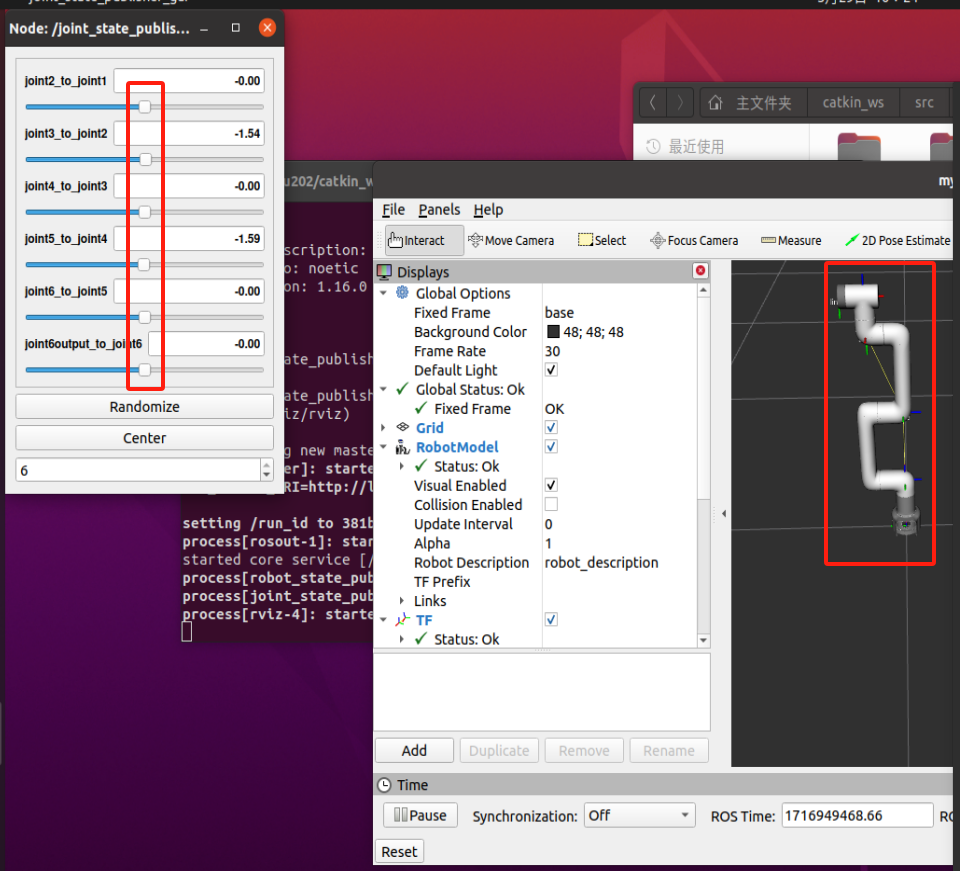
- 在rviz的仿真软件中,将6个关节滑块归零,如下图所示,即可看到模型姿态处于零位竖直姿态
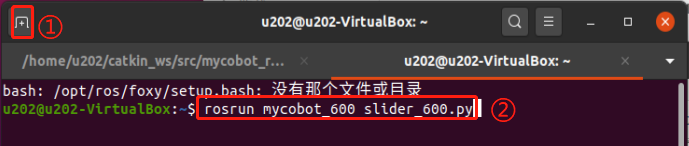
新开一个终端,启动真机跟对进程,启动指令如下:
rosrun mycobot_600 slider_600.py
启动成功后,你可以通过拖动滑块来控制 rviz 中的模型移动且同时控制p600真机移动,请在控制时注意速度不要太快,以免造成机械臂损坏。
注意: 如果在新开的终端中,启动滑块控制真机进程时,出现找不到文件的报错信息,可以使用下面的质量重新加载源码。
source catkin_ws/devel/setup.bash