myCobot PRO 600 Moveit
mycobot_ros 现已集成了 MoveIt 部分。
使用之前需要确定机械臂的IP地址是否与程序文件中的保持一致,如果不一致,需修改程序文件中的IP地址,在程序文件:https://github.com/elephantrobotics/mycobot_ros/blob/noetic/mycobot_pro/mycobot_600_moveit/scripts/sync_plan.py 中的listener函数查看修改。
#!/usr/bin/env python2
# -*- coding: utf-8 -*-
from socket import *
import math
import sys
import time
from multiprocessing import Lock
import rospy
from sensor_msgs.msg import JointState
global mc
mutex = Lock()
# 此处省略部分代码......
old_list = []
def callback(data):
"""callback function,回调函数"""
satrt_time=time.time()
global old_list
# rospy.loginfo(rospy.get_caller_id() + "%s", data.position)
print ("position", data.position)
data_list = []
for index, value in enumerate(data.position):
value = value * 180 / math.pi
data_list.append(value)
print ("data", data_list)
if not old_list:
old_list = data_list
mc.write_angles(data_list, 1999)
elif old_list != data_list:
old_list = data_list
# if mc.check_running():
# mc.task_stop()
# time.sleep(0.05)
mc.write_angles(data_list, 1999)
end_time=time.time()
print('loop_time:',end_time-satrt_time)
def listener():
global mc
rospy.init_node("control_slider", anonymous=True)
ip = rospy.get_param("~ip", "192.168.10.159")
print (ip)
mc = ElephantRobot(ip, 5001)
# START CLIENT,启动客户端
res = mc.start_client()
if res != "":
sys.exit(1)
# print ep.wait(5)
# print mc.get_angles()
# print mc.get_coords()
mc.set_speed(90)
# print mc.get_speed()
rospy.Subscriber("joint_states", JointState, callback)
end_time=time.time()
# spin() simply keeps python from exiting until this node is stopped
# spin()只是阻止python退出,直到该节点停止
print ("sping ...")
rospy.spin()
if __name__ == "__main__":
listener()
打开命令行运行:
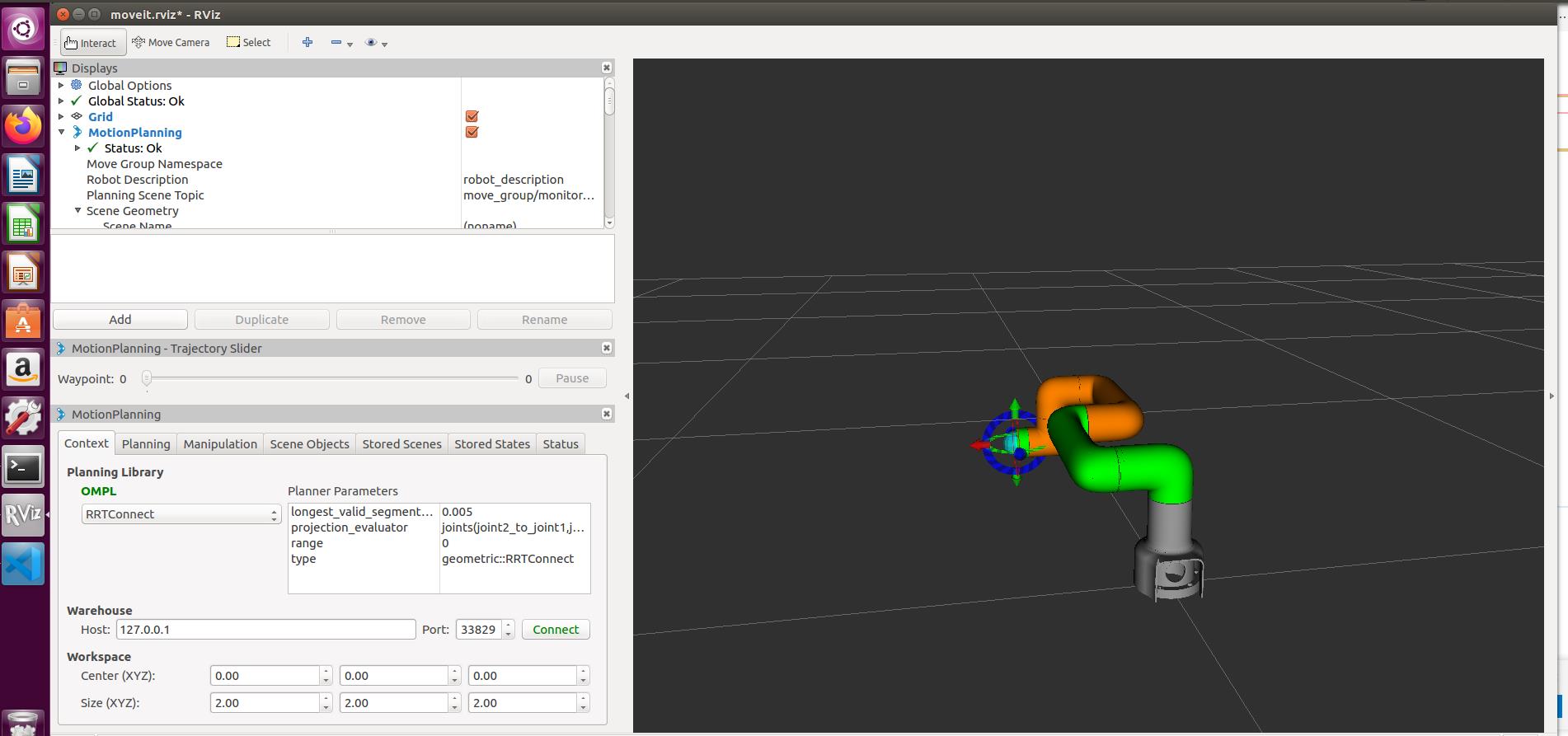
roslaunch mycobot_600_moveit mycobot600_moveit.launch
运行效果如下:
如果需要让真实的机械臂同步执行计划,需要再打开一个命令行,运行:
# mycobot pro 600 默认IP为"192.168.10.159",端口号为5001.具体IP以实际机械臂连接的网络为准.
rosrun mycobot_600_moveit sync_plan.py